基于速度矢量场的无人机编队防碰撞控制方法
2020-10-21 12:12张岑曹东施书成
机械制造与自动化 2020年5期
张岑,曹东,施书成
(南京航空航天大学 自动化学院,江苏 南京 211106)
0 引言
无人机是一种无人驾驶飞行器,主要由无线电遥控或自身程序控制[1]。无人机具有适应性强、安全性好、成本相对较低、隐蔽性好等特有的优势,在民用领域和军事领域都受到了重用[2]。与单个无人机相比,多个无人机协同飞行可以大大提高任务执行效率,因此无人机编队飞行控制技术受到广泛关注。安全性是无人机编队系统优劣的一项关键评价指标,所以在无人机编队系统中加入防碰撞控制方法很有必要。
目前,在无人机编队控制领域,出现了很多不同的队形控制方法,常用的方法有leader-follower法、基于行为法、虚拟结构法以及图论法等,每一种控制方法都有其优缺点。leader-follower法就是指定编队中的一架无人机为长机,其余无人机为僚机。长机在获得地面站发出的指令后,按照指定航迹进行飞行,其余僚机只需跟随长机的运动状态变化即可,包括速度变化、航向变化和高度变化[3]。相比其他方法,该方法原理简单、可控性强、灵活性较好。
本文采用leader-follower队形控制策略、双向通信的的信息交互拓扑,对一架长机、两架僚机组成的无人机编队进行研究。针对无人机编队过程中的机间碰撞问题,构建了速度矢量场模型,给出编队防碰撞控制方法。根据防碰撞方法,在C#平台上搭建了多机编队的仿真系统,通过仿真验证自主防碰撞控制方法的准确性和有效性。
1 基本概念
1.1 速度矢量场基本原理
Khatib 首先提出了人工势场法,用以解决机器人和障碍物之间的自主防碰撞问题。人工势场法的基本思想就是将被控对象的周围环境抽象为势能场,目标点对被控对象产生“引力”,障碍物对被控对象产生“排斥力”,被控对象在合力作用下避开障碍物,移动到目标点[4]。速度矢量场法改进了传统的人工势场法,用合速度代替合力驱动规划对象向目标点运动,相比人工势场法,具有实现容易、快速性更好等优点。
速度矢量场的基本原理就是将目标点和障碍物作为速度场源,在场源作用区域内,每一个被控对象都有一个速度矢量。无人机在合速度的作用下避开障碍物飞向目标点[5]。图1为速度矢量场基本原理示意图。

图1 速度矢量场基本原理示意图

由于本文未考虑地理环境、雷达等外部威胁,因此简化了速度矢量场模型。在速度矢量场驱动下,各速度的矢量和改变了无人机的飞行轨迹,避免编队内的机间碰撞。
1.2 信息交互拓扑结构
无人机编队飞行过程中,只需要使用通信网络拓扑中的部分通信链路进行信息交互,就可以实现编队任务。这些被使用的链路的集合就构成无人机编队的信息交互拓扑[6]。在多无人机的协同编队过程中,各无人机之间定时相互传递位置、姿态信息,能够有效避免编队内无人机间的碰撞,图2为本文无人机编队的信息交互拓扑结构。

图2 无人机编队网络拓扑结构图
为了实现编队,长机需要向次一级无人机发送经纬度、高度、速度、航向等信息。考虑到编队的安全性,长机也需要知道僚机的状态,因此僚机也需要向长机反馈经纬度、姿态信息,于是僚机之间可以通过长机间接收到对方的位置状态。由于leader-follower编队中存在位置误差的传递迭代,越后面的僚机与上一级长机的位置误差越大[7],因此无人机之间也需要传递位置误差信息,以便于下一级僚机进行编队位置修正。
2 速度矢量场建模
2.1 牵引速度模型
无人机机群稳定向目标位置飞行,是编队控制的重要目标之一。牵引速度模型分为长机牵引速度模型、僚机牵引速度模型。
1)长机牵引速度模型

(1)

2)僚机牵引速度模型
当僚机未到达理想编队位置时,理想编队位置处引力场源可提供牵引速度牵引僚机飞向理想位置。僚机牵引速度的方向由僚机当前位置指向理想位置,表达式为:
(2)

2.2 规避威胁速度模型
威胁信息即是编队中的其他无人机,为了贴合实际情况及简化模型,威胁信息的作用区域等效为一个固定半径的圆形,在威胁圆的作用区域内,提供规避场和导引场。显然在无人机编队飞行过程中,应极力避免进入相邻无人机威胁区域。如图3所示,将无人机等效为质点,以其所在位置为圆心、Ra为半径的圆为警戒区域,一般情况下Ra约等于两倍无人机翼展大小,相邻无人机进入可能会发生碰撞。质点为圆心,Rmax为半径的圆为威胁区域作用范围,超过威胁半径Rmax,不受威胁场作用,即规避速度与导引速度都为0。
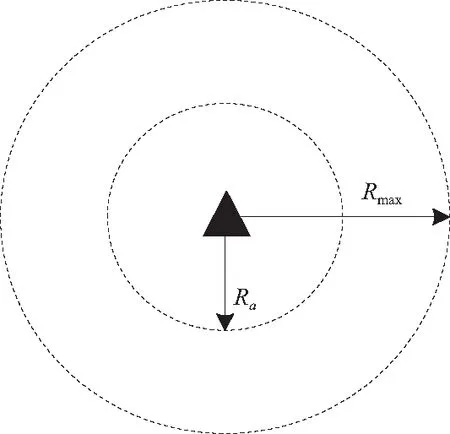
图3 威胁区域作用示意图
规避速度方向由威胁源中心指向无人机,将无人机推离威胁区域[8],无人机i对进入其威胁区域的无人机威胁速度表达式为:
(3)

(4)


(5)
否则导引速度表达式为:
(6)
式(5)、式(6)中R(θ)为矢量旋转矩阵:

(7)
当无人机进入相邻无人机的威胁区域时,规避威胁速度即是规避速度、导引速度的叠加,表达式如下:
(8)
2.3 躲避长机速度模型
在无人机编队飞行过程中,长机的优先级较高,所以在僚机进入长机威胁区域内时,应主动避让长机,避免无人机间碰撞事故的发生。由此便形成了躲避长机速度,方向由长机指向僚机,通过与规避威胁速度的叠加,产生的合速度使相邻的僚机能够及时规避长机,避免发生碰撞。躲避长机速度表达式为:
(9)

(10)
式中:k4表示僚机躲避长机速度调整参数,根据实际情况可调整;Rmax表示长机威胁区域作用半径;b2为警戒区域半径,其值至少为两倍长机翼展。
2.4 合速度模型
在一般情况下,编队飞行中的长机只需跟踪规划好的航迹进行自主飞行,只有当相邻的僚机进入长机的警戒区域内时,长机才会主动避让,所以长机规避合速度表达式为:
(11)
僚机的规避速度等于躲避长机速度与规避其他无人机速度的矢量和,表达式为:
(12)
对于编队中所有无人机而言,导引速度合速度为:
(13)
在编队飞行过程中,队中无人机在合速度的作用下合理避开周围威胁无人机,向目标点飞行,其运动轨迹为:

(14)
3 仿真验证及分析
防碰撞控制一直是无人机编队研究的重点和难点。本次仿真实验以一架长机、两架僚机组成的编队系统为研究对象,采用长机分别与两个僚机双向通信的信息交互拓扑结构,在C#开发平台上搭建仿真软件,以验证无人机编队防碰撞控制方法的有效性。
在无人机编队仿真系统中,长机与僚机1、僚机2的距离初始值都为100 m,两架僚机的间距初始值为140 m,初始队形为等腰三角形,威胁区域半径均设定为80 m。图4为无人机编队正常起飞时的仿真系统示意图,其中导航地图中蓝色飞机图标0为长机,绿色飞机图标1为僚机1,黄色飞机图标2为僚机2,红色航线(细实长线)为长机目标航线(本刊黑白印刷,有关疑问咨询作者)。
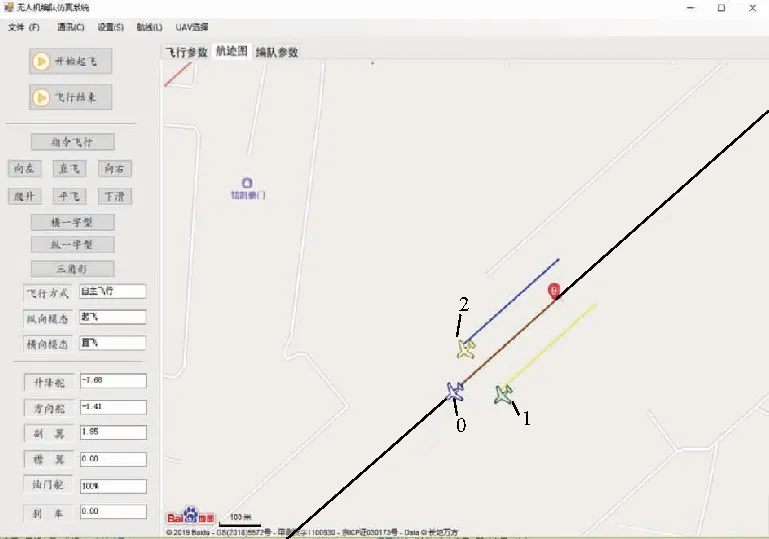
图4 起飞时刻无人机编队仿真系统示意图
在无人机编队以三角形队形飞行过程中,某一时刻通过队形变换将两架僚机目标位置设为同一点,图5为有、无防碰撞控制方法下两僚机间距对比示意图。
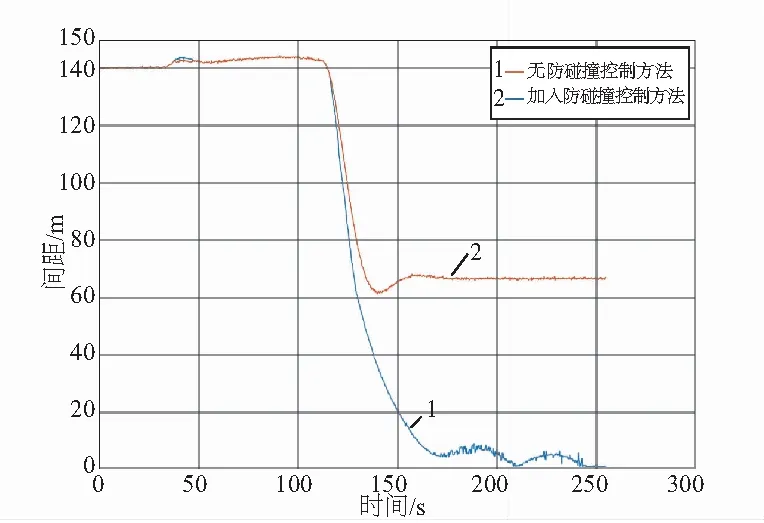
图5 有、无防碰撞控制方法下两僚机 间距对比图
如图5中1曲线所示,在仿真开始后,无人机编队按照初始的三角形队形飞行。在第113 s,发送控制指令进行队形变换,将僚机1、僚机2的目标位置设置为同一点。由于仿真系统中没有加入自主防碰撞控制方法,两架僚机迅速进行位置调整,间距急剧减小,最终减少到0,两架僚机发生了碰撞事故。
如图5中2曲线所示,在点击仿真运行后的第113 s,通过飞控指令将两架僚机的目标编队位置设为同一点,然后两架僚机的间距迅速减小,在第138 s时两架僚机的间距降到最小值61 m,不会发生碰撞。最终两架僚机间的距离维持在66 m左右。由此可知,在防碰撞控制方法的作用下,即使两架僚机的目标点相同,编队系统也会进行自主调整,避免无人机间碰撞,保证编队的安全性。
当编队系统没有加入防碰撞控制方法时,如图6中1
曲线所示,仿真开始后,在第120 s点击纵一字型编队指令,此时僚机1减速飞向长机正后方,僚机2加速飞向长机正前方,长机与僚机2的间距越来越小,在第210 s时减少至0,长机与僚机2发生碰撞。
当编队系统中加入防碰撞控制方法后,如图6中2曲线所示,在第120 s发送纵一字型编队遥控指令。在僚机2飞向长机正前方的过程中,其间距越来越小,在186 s减少至最小值43 m左右,不会发生碰撞,此时僚机2进入了长机和僚机1的威胁区域,受到长机与僚机1威胁场作用,在规避威胁速度和牵引速度之合速度作用下,僚机2到达目标点,顺利完成纵一字型编队。
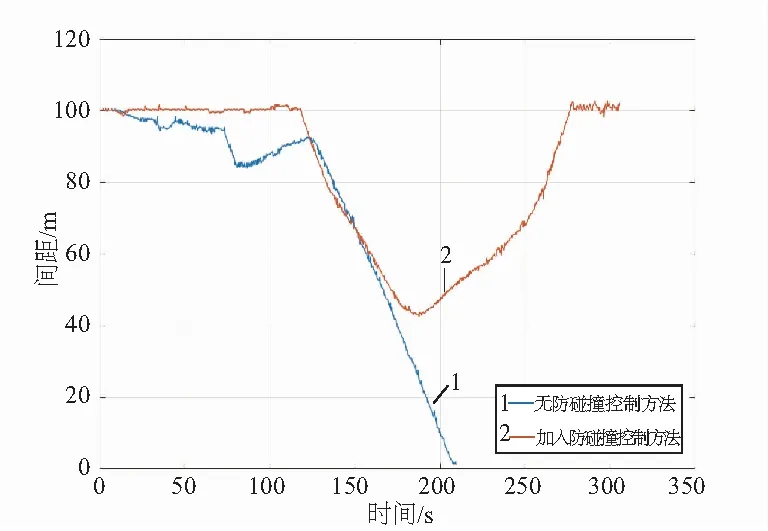
图6 有、无防碰撞控制方法下长机与僚机2 间距对比图
4 结语
以三架无人机组成的leader-follower编队为研究对象,在速度矢量场法和双向信息交互拓扑结构的基础上,搭建了无人机编队的速度矢量场模型,提出了编队防碰撞控制方法,实现了无人机编队过程中的自主防碰撞。通过仿真实验,验证了所提出的防碰撞控制方法的有效性,对其在工程上的应用具有一定的借鉴性。
猜你喜欢
小哥白尼(军事科学)(2021年4期)2021-07-28
西安航空学院学报(2020年5期)2020-12-08
小学科学(学生版)(2020年8期)2020-08-24
小哥白尼·趣味科学画报(2020年1期)2020-06-09
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
时代青年(上半月)(2017年1期)2017-02-09
中国设备工程(2016年13期)2016-02-05
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27