双旋翼横列式无人机在农业植保领域的应用
2020-10-21 01:29刘思奕
湖北农机化 2020年16期
刘思奕 周 航
(武汉亿航自动化有限公司,湖北 武汉 430000)
1 国内植保无人机发展现状
中国作为农业大国,拥有1.3亿hm2基本农田,每年需要大量的农业植保机械作业。然而,农村劳动力短缺,年轻人不愿意从事繁重的农业生产,老年人体力下降,对于农业生产心有余而力不足。此外,每年农药中毒、农药残留和污染事件频发,给家庭带来巨大的悲痛。与传统植保作业相比,无人机植保具高效率、更绿色、更安全等特点,作业人员也避免了暴露于农药当中的危险,因此受到市场广泛欢迎。
国内植保无人机产业最初是从2008年起步,起初是以油动无人直升机作业为主。当时植保无人机发展处于萌芽阶段,价格高,性能稳定性差,没有实现大规模量产,用户难以盈利。自2016年以后,我国植保无人机产业开始迅猛发展,各大无人机厂家陆续加入,使产品的性能、性价比快速提升。
植保无人机的机型按照动力可分为油动型和电动型,按照旋翼数量可分为单旋翼和多旋翼。油动型植保无人机以单旋翼为主,电动型以多旋翼居多。油动型植保无人机载重量大,有效载荷在15~30kg,续航时间长,连续作业能力强,但操控相对复杂,维护成本较高,售价昂贵;电动型植保无人机载重量小,有效载荷在10~20kg,续航时间受电池容量限制,但操控简单,容易维护,稳定性更好,售价低。
目前我国植保无人机销量逐年上升,作业面积保持大幅的增长,但相对于发达国家,我国农业植保环节的机械化水平较低,植保机械渗透率提升空间很大。
2 新型双旋翼横列式无人机的研发
针对大型果园、农场等环境,定点安装摄像头来监测作物生长状况,存在着监视范围窄、果园布线难、线路易损坏、保护难度高、投入资金大等问题。本文设计了一种新型双旋翼横列式无人机(图1)。该无人机可以对果园、农场等环境进行快速勘探,观察作物长势、监视虫害影响,并对作物产量进行预估。该产品具有轻量化、柔性化、智能化以及性价比高等特点。
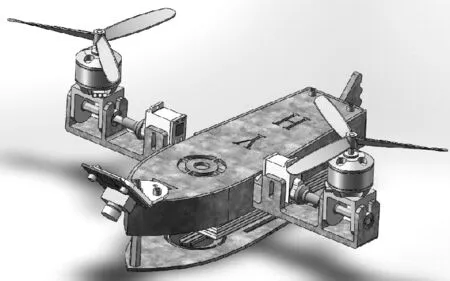
图1 新型双旋翼横列式无人机
2.1 整体设计框架
机身整体将采用3D打印技术进行加工制作,设计框架如图2所示,主要分为主控系统与图传系统。其中主控系统主要包括对左右无刷电机、GPS定位系统、遥控接收器等部件进行控制或接收信号,图传系统将OpenMV捕获的作物图片经过主控板处理后实时传输给图传发射器。
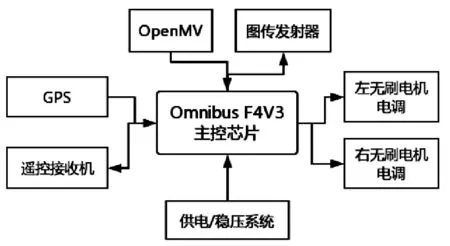
图2 无人机整体设计框架
2.2 主控系统
主控板Omnibus F4V3采用进口STM32F405主芯片,缓存高达128MHz,拓展IO口丰富。该无人机是通过2只BLS 30A电调分别控制左右2枚无刷电机,BLS电调自带12颗ESR电容组成的滤电容电路,能够有效降低对图传设备的干扰,并提高系统的稳定性。GPS导航系统采用BN-220模块,内置FLASH、TTL电平、1HZ输出、NMEA-0183协议输出。数据信息回传模块(遥控接收器)采用PRM-03,该模块能将飞控中的GPS、飞行高度、飞行速度、飞行距离等信息回传到AT9或AT10中,再在AT9或AT10的界面上显示出来。基于以上高性能模块的组合搭配,该款双旋翼横列式无人机能广泛适应于复杂的农田环境。
2.3 图传系统
图传系统是整套无人机勘测系统中最为核心的组成部分,当无人机掠过作物上方时,通过图传系统对作物生长状况进行拍照取样,通过无线图传拓展板将图片传输给地面控制中心进行预处理。由此可见,图传系统性能的稳定性很大程度上取决于信息传输过程中是否存在波动以及图传算法的先进性。
为此,该双旋翼横列式无人机搭载的是开源硬件OpenMV以及配套无线图传拓展板作为图传系统的硬件基础(图3),同时,在软件上优化了图传控制算法,硬件上加装信号放大器,确保了信息传输的完整性与稳定性。
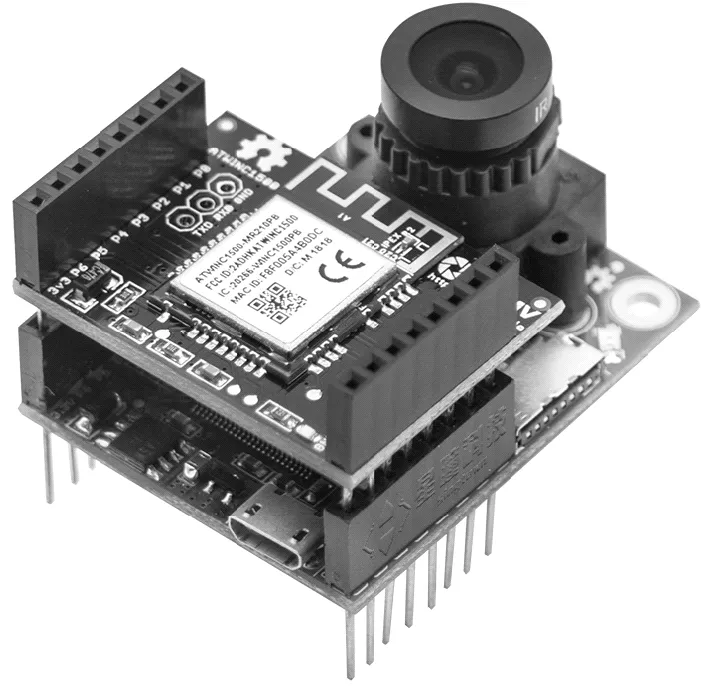
图3 图传系统硬件基础
3 农田作物生长状态监测方案
3.1 基于深度学习的作物成熟度检测算法
为了实现农作物种植的智能化管理,以及对作物成熟度、产量等数据的准确预测,本文在无人机图传的基础上,将基于深度学习的图像目标检测技术引入到作物成熟度检测方面,提高了科学种植能力。
此方法首先依次对从图传系统捕获的照片进行RGB颜色空间直方图均衡化、高斯滤波、局部均值分辨率调整的图像预处理工作,如此能大大提升输入网络的照片质量,并进行图像几何变换的数据增强,扩充样本数据集,实现作物照片的批量化提取;其次采用迁移学习引入深度学习模型INCEPTION V3,经过训练,当作物成熟度数据测试集上的准确率大于95%时,可满足勘测精度需求;最后,将该方法用于实际果园,发现该方法对作物成熟度检测具有较好的识别效果,同时能够实现智能化观测,避免了人为主观判断带来的影响。
3.2 实际应用案例
为了验证检测算法的实际效果,利用本文所研发的双旋翼横列式无人机对0.67hm2种植有柿子树的果园进行实地测试。利用该算法对采集的作物图像数据进行训练、测试和验证,对测试图像目标进行检测,漏检率约为7%,错检率约为2%,精度较高。同时,也将该算法和其它深度学习目标检测算法进行了对比和分析,测试结果反馈检测速度较快、检测精度良好,可以大范围推广使用。
4 结语
本文设计的一种新型双旋翼横列式无人机,采用了双旋翼横向对称布置且两旋翼转速一致,旋向相反,抵消了传统直升机自有的自旋力矩,同时采用大功率发动机,提高了飞机单位功率,提高飞机载荷能力,空气动力学性能更好。对于在作物生长过程中,未成熟与成熟时,果实颜色差异显著且果实体积较强的作物品种,该无人机检测的准确率较高;对于果实体积较小的作物品种,且田间杂草较多时,检测的准确率不高。因为田间或果园工作环境较为杂乱,使得收集的图画富含很多噪声或搅扰,例如作物的果实常常被茎叶遮挡,田间光照也经常改变,因而辨认的准确率不高。总体来说,本文将双旋翼横列式的结构应用在植保无人机领域具有很强的实践意义,提出了一种高机动性、高性价比的作物生长状态勘探方式。
猜你喜欢
今日农业(2021年17期)2021-11-26
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
航天工业管理(2020年9期)2020-12-28
中国品牌(2020年4期)2020-11-16
今日农业(2020年18期)2020-10-27
航天工业管理(2020年1期)2020-04-20
电子制作(2019年9期)2019-05-30
学苑创造·B版(2018年12期)2018-03-04
装甲兵工程学院学报(2017年4期)2017-09-16