无人机飞行高度和速度对喷药效果的影响分析
2020-10-19 06:42刘海明
农机化研究 2020年8期
刘海明
(苏州农业职业技术学院,江苏 苏州 215008)
0 引言
近年来,随着农业智能化种植水平的不断提高,无人机用于农田施药灌溉的领域不断拓宽,其优点在于能够大大提升灌溉作业效率。早期一致认为,一定的平衡安全飞行高度可保证无人机喷药的定量性。为了进一步掌握无人机在进行施药过程中雾滴的变化规律及最大限度节约药物使用量和喷药的覆盖率等,专家学者研究发现,无人机的飞行高度和速度是主要制约因素之一,不同的速度变化会带来不同的雾滴沉积分布,不同的高度变化会引起喷药幅度的变化等等。为此,在借鉴前人研究成果的基础上,从无人机施药系统的整体设计及控制原理角度出发,对飞行高度和飞行速度造成的不同喷药效果展开研究。
1 无人机原理及组成
农用无人机在进行田间施药作业时按照一定的轨迹顺序进行,作业现场如图1所示。无人机避免了人工大面积喷灌的弊端,旋转的机翼可对作物的背光面起到一定的风力作用,致使喷洒的药物能够较为便利地达到,提高了整体的喷药效率。其作业原理可简要概述为:通过地面的监控系统与无人机机体上的通信装置进行控制调节(整体运作机理如图2所示),无人机机体上装载一系列的功能模块,如通信控制、数据显示与保存、命令控制等;飞行轨迹规划模块及相关算法则通过UDP通信至作业田间视景显示模块到达无人机装置,无人机按照轨迹路径指令进行喷洒作业。

图1 无人机进行喷药作业现场图Fig.1 Working scene of the spraying of the unmanned aerial vehicle。
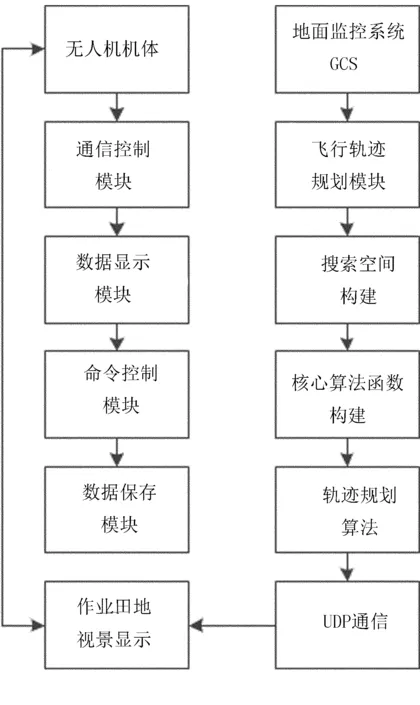
图2 无人机进行施药作业整体运作机理图Fig.2 Whole operation mechanism of the UAV spraying working。
无人机的机体上加装了安全感知和避让系统及GPS定位,包含识别异常状态的自动返程功能。表1为农用喷药无人机所应具备的核心性能参数。由表1可知:其作业幅宽及雾滴粒径大小的形成,不仅与喷药系统喷头数量及喷出流量有关,而且与无人机的作业速度和高度变化情况存在一定的内部联系。通常而言,高度设定的恰当性更为关键。
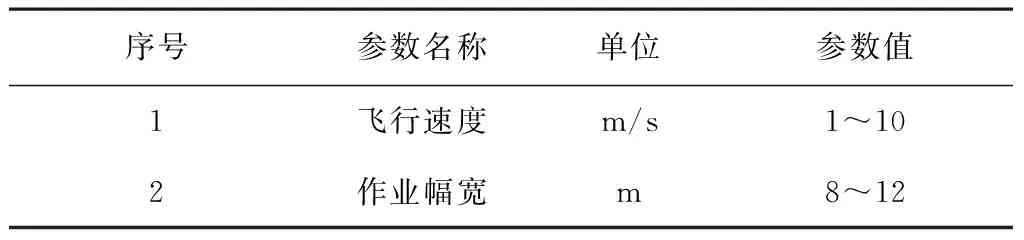
表1 农用喷药无人机核心性能参数Table 1 Core performance parameters of the agricultural drug spraying UAV。

续表1。
2 实施喷药机理分析
2.1 理论模型建立
以无人机飞行施药过程中流动的雾滴为研究对象,选取雾滴沉积密度、沉积覆盖率和分布均匀度作为衡量喷药效果好坏的衡量指标,列出喷药机理的理论模型为
(1)
式中D—雾滴沉积密度;
n—收集到的雾滴沉积数量;
A—试验用水敏纸张面积。
(2)
式中C—雾滴沉积覆盖率;
S—雾滴沉积颗粒面积;
A—试验用水敏纸张面积。
(3)
式中CV—雾滴沉积均匀度变异系数;
SD—雾滴沉积颗粒标准差;
X—试验采集到的平均雾滴数量。
雾滴沉积密度越大,表明无人机施药在作物上的作用点越多,施药范围越广;雾滴沉积覆盖率越大,表明喷洒药物与作物的接触面积在增大,喷药效果良好;雾滴沉积均匀度变异系数越小,表明喷洒区域雾滴分布情况均匀度越好。
无人机喷药系统的智能化施药作业控制流程如图3所示。其中,PWM控制器作为实现关键控制的主要步骤,其上的数据采集卡通过两路进行数据信息传递:一路经驱动放大电路传递给喷药执行开关,到达隔膜泵进行动作;另一路经驱动放大电路传递给喷药执行机构电动离心喷头,进行感应动作,同时压力、流量等信息将实时反馈给数据采集电路进行对比调控,实现精准施药。

图3 智能化控制的无人机喷药系统设计框图Fig.3 Design block diagram of UAV spraying system with intelligent control。
2.2 系统硬件配置
无人机施药系统的硬件配置必须保证施药的给药、喷洒、关闭等环节动作衔接,其内部控制的数据采集结构如图4所示。为保证信号识别处理的精准性,选择ARM系列微处理装置,由稳压电源给予不间断供电。工作时,从田间获取的信号经输入输出接口进入信号前处理模块,功率的放大与信号的分配起到分类整理作用,经整定后分别经数字、模拟信号端口输出。
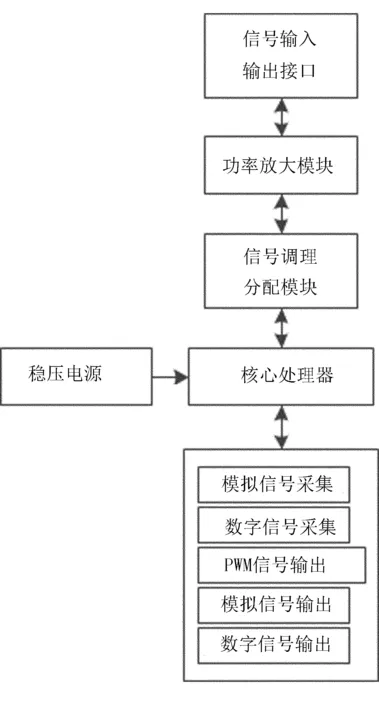
图4 无人机控制内部数据采集结构框图Fig.4 Data acquisition structure flowchart of UAV control system。
针对各硬件配置(如传感器、稳压电源、滤波器等)需要进行规格选定,表2给出该系统用的位姿传感装置主要参数情况,以便准确获得无人机在进行飞行施药作业过程中转角精度变化感应信息,为下一步轨迹调整做出参考和提示。

表2 无人机飞行系统位姿传感器主要参数设置Table 2 Main parameters set of the posture sensor on the flight system of the unmanned aerial vehicle。
2.3 系统软件设计
无人机进行施药作业时,其航行轨迹的规划决定飞行喷洒的有序性和完整性,按照既定的规划路径可以最完整的设计状态完成喷药作业。喷药高度及速度的设置融合在该系统的软件控制后台程序中,按照规划飞行轨迹控制原理(见图5),进行方向及曲率控制器的参数设置、加速度控制器及姿态与速度等控制器的正确连接和参数输入,各控制参数须有序传送至无人机本体,同时本体将反馈于各飞行轨迹控制装置进行比较调整,形成实时性的闭环控制。
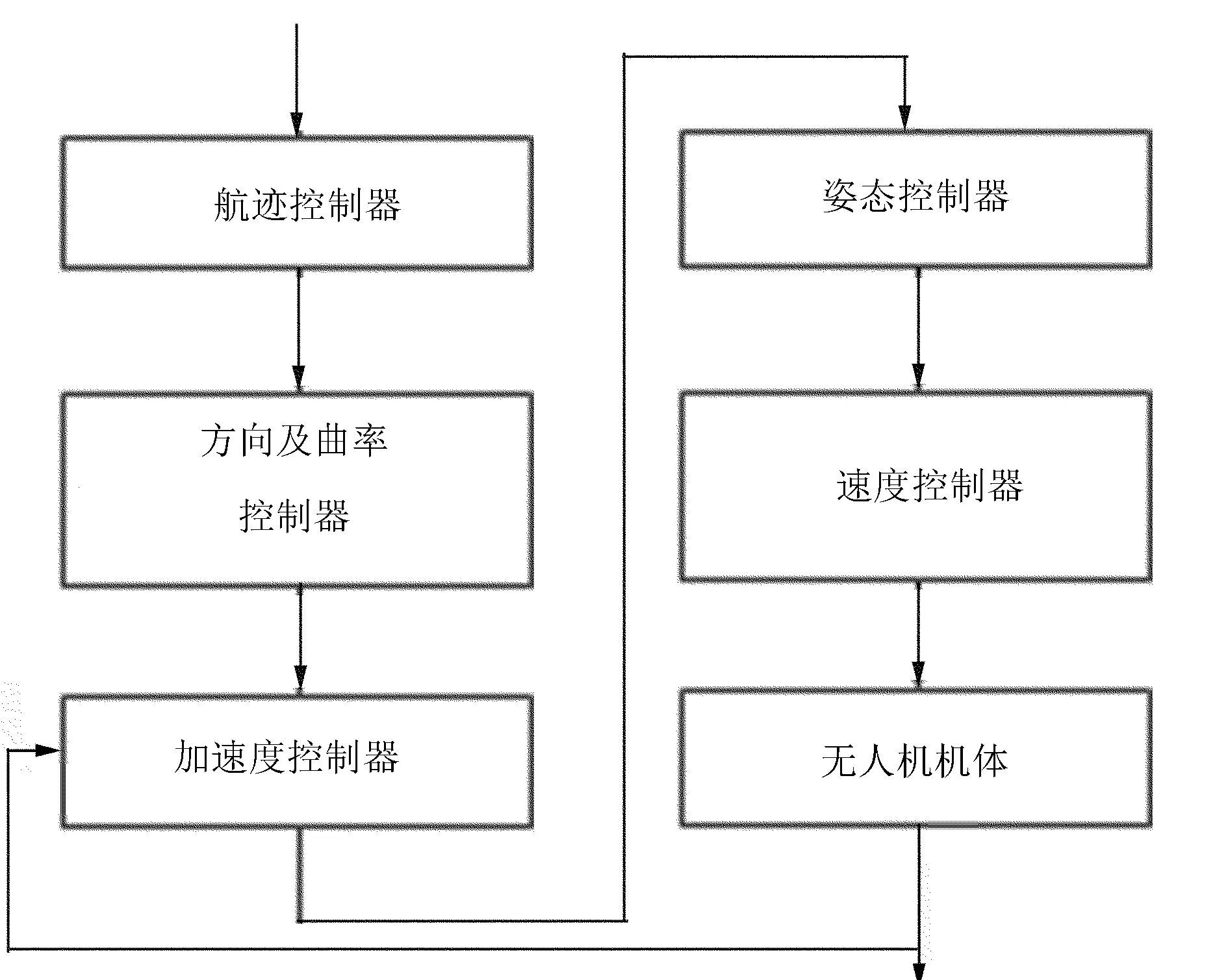
图5 无人机飞行轨迹控制原理简图Fig.5 Control principle sketch of the UAV flight trajectory。
喷药过程中,系统的数据处理较为庞大,外部体现的飞行高度设置和速度设置在飞行过程中不断变化实现,针对喷药系统内部的数据处理须明确流程(如图6),根据获得的单位帧激光数据通过滤波处理和核心算法换算后得到机体可识别的控制指令,从而带动无人机的飞行动作及喷药动作机构执行。
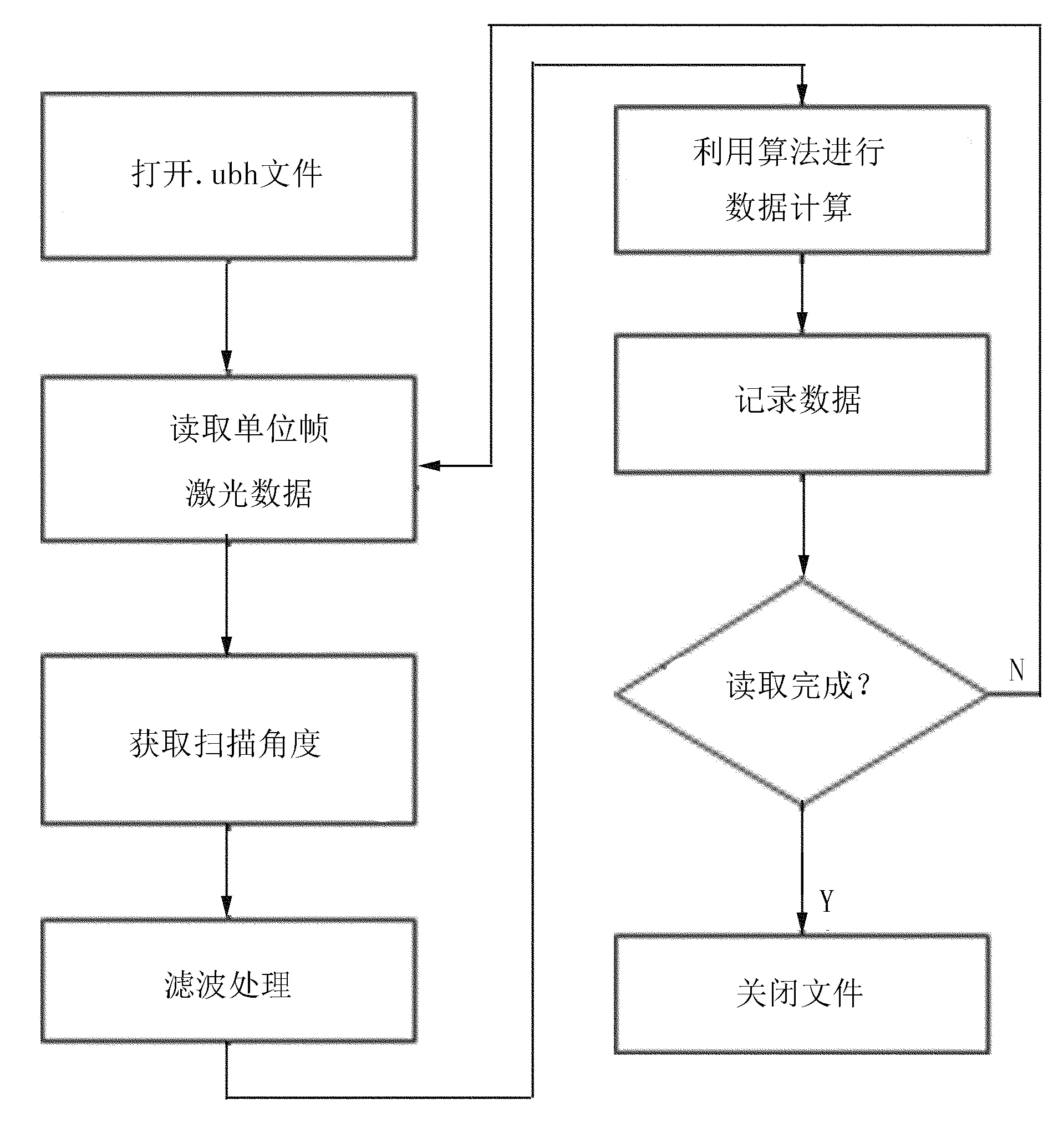
图6 无人机喷药系统内部数据处理流程简图Fig.6 Flow chart of data processing in the UAV spraying system。
3 实施喷药效果试验
3.1 条件设置
无人机喷药试验装置如图7所示。
进行无人机喷药效果试验,利用远程遥控进行不同飞行高度和速度下的喷药作业,条件设置如下:①选择温度、湿度相对稳定的田间环境;②静风状态下对飞行速度不造成干扰;③田间作物生长高度及地形保持较好的一致性;④无人机试喷药过程信息畅通等。
3.2 过程分析
在相对湿度保持在55%、田间温度保持在16℃的环境下,无人机的施药流量控制在0.85L/min左右,喷嘴压力设置为0.2MPa,各自保持飞行速度在0.5、0.7、0.9m/s,分别变换飞行高度为1.2、1.4、1.6m,结果如表3所示。

表3 无人机飞行喷药试验不同参数下的指标数据统计Table 3 Indicator statistics data for UAV flight spray test under different parameters。
续表3。
由表3可知:不同飞行高度的雾滴沉积覆盖率平均为14.56%(H=1.2m)、14.20%(H=1.4m)、11.03(H=1.6m),整体呈现出下降趋势,可见高度与速度不一定越快越好。
进一步对比数据可知:在无人机选择飞行高度H=1.4m、飞行速度V=0.5 m/s组合参数下,该喷药装置可实现的雾滴沉积密度为中上等,可达72.2%,符合施药要求;雾滴沉积覆盖率为试验组合中最大为26.9%,最终的雾滴粒径分布均匀度达90%以上,为最佳施药参数组合,后期经Matlab软件数据拟合也验证了该结论。
4 结论
1) 通过了解无人机进行施药作业的运作机理,分析喷药的效果影响因素,建立了理论评价指标模型。同时,从无人机的喷药系统控制环节入手,进行硬件装置配备和软件程序调控,形成整体性的无人机智能化喷药作业系统。
2) 选取无人机飞行高度和飞行速度作为喷药作业的变换参数,内部设定相关控制指令与程序,进行一定条件下的无人机喷药试验。
3) 试验结果表明:雾滴沉积覆盖由无人机飞行高度逐渐升高呈现出降低趋势。同时,经数据对比可知最佳飞行高度1.4m和飞行速度0.7m/s组合条件下无人机喷药效果最佳,从而为进一步研究无人机喷药作业提供参考。
猜你喜欢
红领巾·萌芽(2023年8期)2023-07-21
作物研究(2023年2期)2023-05-28
热带作物学报(2021年1期)2021-02-22
河南畜牧兽医(2020年21期)2020-01-10
科技信息·中旬刊(2018年9期)2018-10-21
航空模型(2016年5期)2016-07-25
纺织科技进展(2015年1期)2015-11-28
百科探秘·航空航天(2015年12期)2015-11-07
装备学院学报(2015年6期)2015-01-10
中成药(2014年10期)2014-02-28