基于BS架构的收割机轨迹数据可视化分析系统
2020-10-19 02:14:52马江涛郑远攀
农机化研究 2020年12期
江 楠,马江涛, 郑远攀
(郑州轻工业学院 计算机与通信工程学院,郑州 450002)
0 引言
随着农机自动化技术的不断发展,农机的社会化服务越来越普遍,但目前对于农机的派出、组织生产、作业管理和质量监控缺少有效的管理技术手段,特别是在农忙时节,由于农机资源的不合理调度会造成农机的缺口比较大,农机作业效率低,农业作业生产需求得不到有效的满足。
B/S架构即浏览器和服务器架构模式,是随着Internet技术的兴起对C/S架构的一种变化或者改进的架构。在这种架构下,用户工作界面通过浏览器来实现。B/S架构是Web兴起后的一种网络架构模式,Web浏览器是客户端最主要的应用软件。这种模式统一了客户端,将系统功能实现的核心部分集中到服务器上,简化了系统的开发、维护和使用。将B/S架构应用到农机的远程调度系统上,可以提高调度系统的可查询和可视化水平,实现农机作业轨迹的实时动态显示,对于提高调度系统的管理效率和水平具有重要的意义。
1 收割机轨迹数据分析系统
收割机轨迹数据分析系统主要是根据农机作业的实时动态情况,通过传感器收集农机动态作业信息,再将数据返回到远程数据库系统;利用数据分析服务器和应用服务器对数据进行可视化分析后,将农机的行驶轨迹可视化地呈现给农机管理人员和驾驶操作人员。为了提高轨迹数据分析系统的可查询功能和可视化功能,采用MySQL数据库和Web技术对系统进行改进。Web技术对MySQL数据库进行访问需要数据交互的基本框架,而采用Browser/Server(简称B/S)结构可以实现应用服务器访问数据服务器的功能,其基本结构框架如图1所示。
在B/S 结构的架构下,进行收割机数据可视化分析后,用户可以方便地采用Web浏览器进行浏览,并获取网页的信息。收割机作业时,可以将作业行驶轨迹数据实时返回给远程数据分析系统;数据分析系统通过可视化处理形成轨迹,并呈现在浏览器页面上;农机管理人员根据作业情况对收割机做出合理的调度和安排,规划其行驶路径,提高作业效率。当作业的农机较多时,管理人员还可以根据每一台收割机的作业情况,对其后期作业做出合理的分配,从而提高收割机的作业效率。
2 收割机轨迹跟踪
以韭菜收获机为例,割刀电机是韭菜收割机的关键所在,因此选择合适的割刀电机尤为重要。笔者通过实验计算韭菜被割断时的切割力,选择比较合适的割刀电机。
实验主要是利用特制的夹具固定20根韭菜,然后用割刀割断,同时记下韭菜被割断时候割刀所收到的力。选取6组韭菜进行割断实验,然后测量6组隔断力并计算平均值。割刀受力实验数据如表1所示。
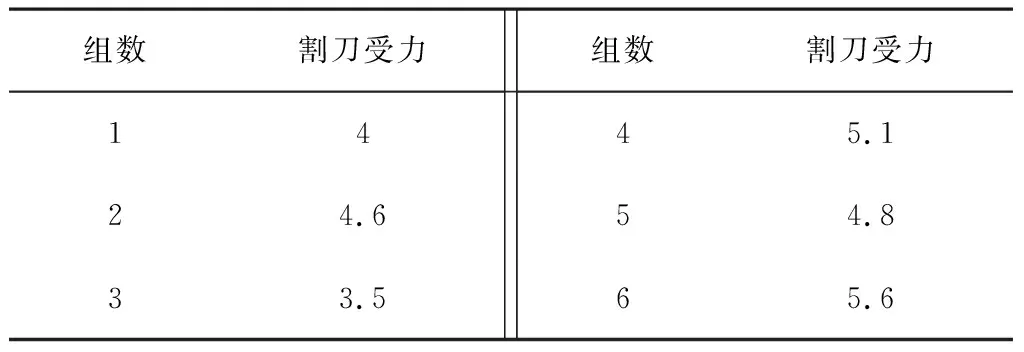
表1 割刀受力实验数据Table 1 The experimental data of cutting force N
根据表1,计算出20根韭菜被隔断时割刀受到的力为4.6N。因此,割刀电机需要输出的扭矩T为
T=F×r=0.46(N·m)
(1)
韭菜收割机的割刀在作业过程中,某一时间点相对于被切割的韭菜做余摆线运动,那么刀片根部即与韭菜接触的地方为最低速度,即
(2)
当ωt+γ=(2k+1)π(k=0,1,2,…,n)时,刀片某一点的速度va为
va=vamin=rω-vb
(3)
其中,vamin为刀片某一点最小速度,r为刀片半径,vb为刀具前进速度。
使用割刀切割韭菜时,速度较小,会破坏韭菜根部,给果农造成损失,则确定割刀的最合适的速度非常重要。根据文献查询和实验得出:割刀速度为12~32m/s时对韭菜根据伤害最小,因此设计取vb=0.7m/s。
结合前文介绍,可以计算出刀片根部的转速计算公式为
(4)
割刀的半径为10cm,将其带入公式可以计算出割刀转速为1800~8500r/min。本文选择57BL75S10-280TF9高速直流无刷电机,电机采用节能环保领域的骄子-钕铁磁硼钢,保证设备的良好性能。电机电压24V,功率100W,转速最高8000r/min,额定扭矩0.12N·m。具体参数如表2所示。
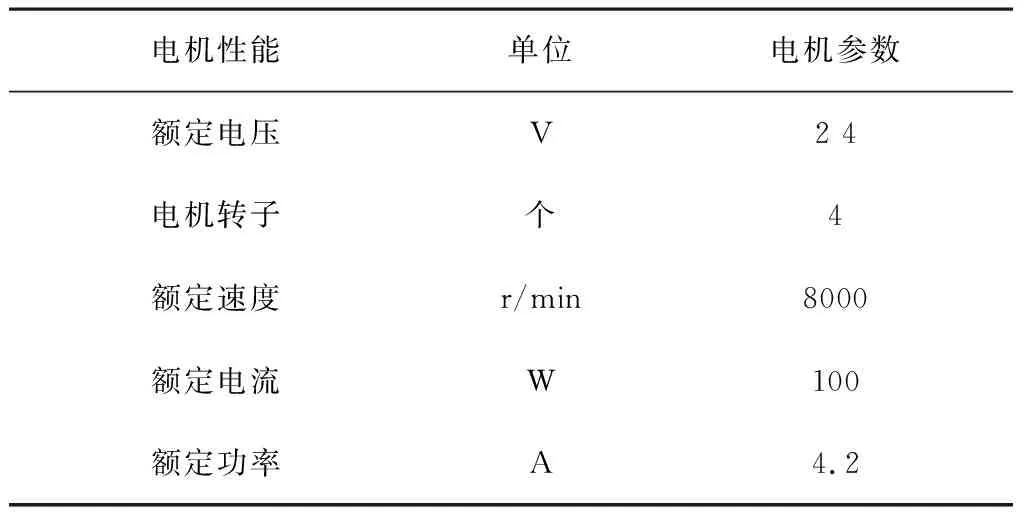
表2 韭菜收割机割刀电机参数Tab le 2 The electric parameters of cutting knife of leek harvester
为了实现收割机轨迹数据的可视化,需要对收割机的移动数据进行实时采集,捕捉动态运动目标。与静止目标图像的捕捉不同,动态目标的捕捉需要使用图像逼近的方法,捕捉过程需要对实时图像的各帧进行扫描。假设运动图像的第k和k-1帧图像的灰度值分别为fk(x,y)、fk-1(x,y),Dk(x,y)表示差分运算结果,其表达式为

(5)
采用图像帧间差分算法可以对运动的收割机目标图像进行捕捉,但在处理时会发生空洞现象。因此,在对目标进行识别时,可以采用外接矩形的方法,在收割机目标周围建立一个外接矩形,将处理图像和第1帧图像相减,得到完整的收割机目标区域。为了提高目标捕捉的精度,在进行图像处理之前可以对图像进行去噪声处理,处理过程可以采用迭代计算的方法,流程如图2所示。
如果同时满足以上3个条件,则称Bk、Ck、Ek、Fk、Dk为图像M的二次多分裂。
帧间差分分裂迭代模糊聚类过程如图3所示。图3中:在去除噪声时,由于分裂迭代计算会产生较多数量的图像,因此引入模糊分类方法对图像进一步处理,从而获取更加准确的收割机运行轨迹。在进行模糊分类时,其隶属度函数为

图3 帧间差分分裂迭代模糊聚类过程Fig.3 The splitting iterative fuzzy clustering process of interframe difference
(6)
其中,mi为聚类中心;a、b为计算参数,其数值一般是正数;μ(x)表示隶属度函数,λ(x)表示非隶属度函数;π(x)表示直觉指数π(x)。三者的关系式为
μ(x)+λ(x)+π(x)=1
(7)
聚类K-means算法是一种智能化程度较高的算法,利用关联规则进行数据挖掘和分析。在进行分类时,首先统计含有一个元素项集出现的频率决定一维项目集;然后统计项目集的支持度。表3为一个简单的数据记录表。
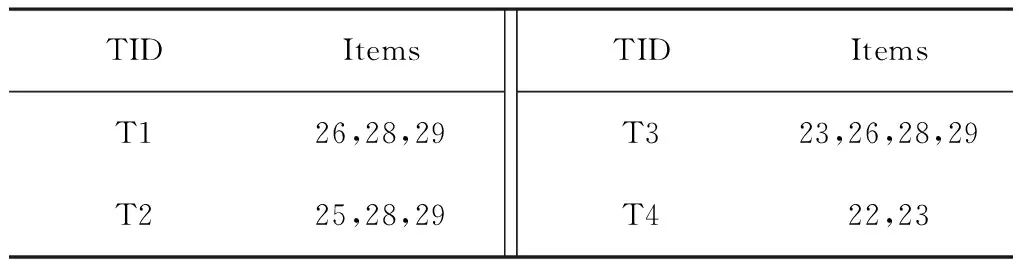
表3 数据记录表Table 3 Data Record Table
在关联算法中,需要创建每个数据记录候选集的支持度,再通过数据之间的关联性对数据进行分类。其步骤如下:

(8)
其中,Nj为第j个聚类域Sj中所包含的样本个数。求出均值向量后,将其作为聚类中心,计算均值,其函数规则为
(9)
最后,对每个聚类的数据进行均值核算。

通过模糊聚类后,图像运动后的位置将被确定,利用可视化技术便可以绘制出农机的轨迹。为了实现农机轨迹的可视化显示,搭建了基于B/S架构的可视化平台。其开发主要采用ASP.NET开发环境,编程语言采用C语言,可视化显示的数据库采用SQL数据库。这样,在收割机作业过程中远程端可以实时显示作业动态轨迹。
采用平移倾斜装置,在垂直平面中上下旋转工业相机获取同一行但不同距离的农作物位置。作物行和联合收割机间距离示意如图4所示。

图4 作物行和联合收割机间距离示意图Fig.4 Diagram of the distance between crop rows and combines
图4中,GPS用于收割机的自身实时定位;IMU为惯性测量装置;P1处的农作物通过工业相机以48°的倾斜角拍摄得到;P2是在倾斜角度为69°时检测到的另一作物的位置。P1、P2间的直线可以认定为分离切割与未切割区域的作物行,其在笛卡尔坐标系下的表达式为
ax+by+c=0
(10)
其中,a、b、c为直线系数值。
将横向偏移ε和偏转角δ作为两个参数来确定转向角φ,表达式为
φ=A1ε+A2δ
(11)
ASP.NET是一种动态的Web技术,利用该技术用户可以更加快速地开发Web应用程序。该技术支持各种类型的浏览器,结合Web站点和Web服务技术,远程端只需要在浏览器界面操作便可以查看收割机的作业轨迹。编程主要采用了C#编程语言,较为简单,可以与.NET框架完美结合。数据库采用了SQL数据库,具有强大的数据库创建、开发、设计和管理功能,且具有较好的可扩展性。搭建好可视化平台后,对采集得到的收割机运动目标数据进行处理,如图5所示。
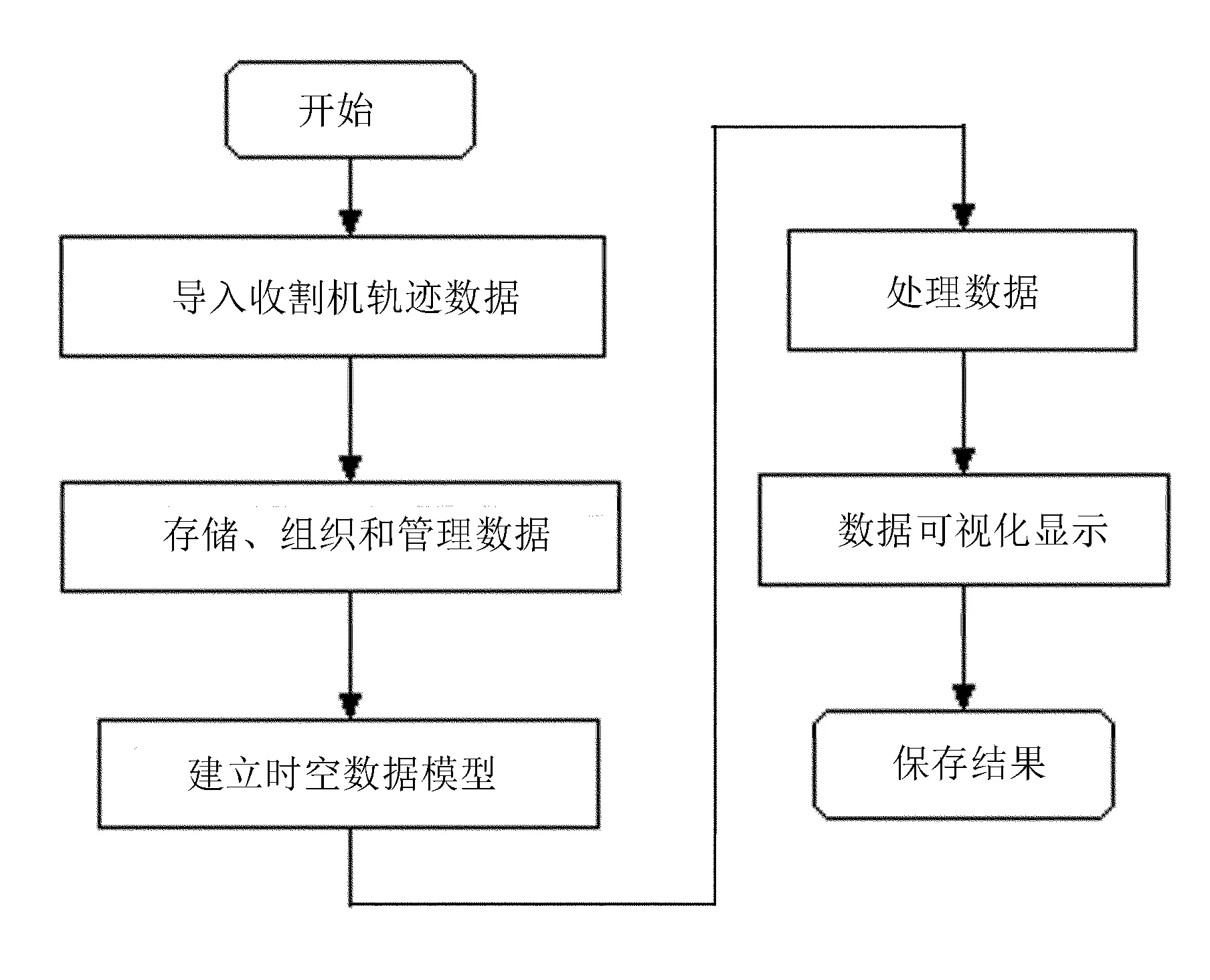
图5 轨迹可视化显示过程Fig.5 The visual display process of trajectory
基于B/S架构的可视化显示平台,采用C#语言编程和SQL数据库技术,可以对之前采集和去噪的收割机运动数据进行处理,然后在远程端对收割机的运行轨迹进行可视化显示。除此之外,还可以对轨迹数据进行保存,以便后期对历史数据进行查询。
3 收割机轨迹数据可视化分析系统设计
农业收割机轨迹的数字化显示可以为调度系统提供可靠的数据支持,根据农机作业的实时轨迹显示农机管理人员可以对农机进行合理的调度,通过最短路径规划、多收割机系统作业等方式 提高收割机的作业效率。
收割机可视化管理用户注册成功后,将收割机信息存入数据库,其实现采用java编码实现,核心程序如下:
//创建收割机可视化管理员用户相关实体
farm machinery fmzh = new farm machineryZh();
farm machineryJb fmjb = new farm machineryJb();
farm machineryLx fmlx = new farm machineryLx();
//将学员信息存入对应实体
fmzh.setname(a);
fmzh.setPassword(b);
fmjb.setfmSf(xysf);
fmjb.setFdWay(Qualification);
fmjb.setPosition(Position_b);
fmlx.setPhone(request.getParameter("Tel"));
//通过调用manage方法将数据存入数据库
farm machineryManage.savefmLx(fmlx)
farm machineryManage.savefmLx(fmjb)
farm machineryManage.savefmLx(fmzh)
注册完成后,便可以进行登录操作。采用前端JSP的Lgin.jsp来实现登录功能,在LoginAction类中判断用户是否可以正常登录系统。功能的实现采用Java语言编写,流程如图6所示。
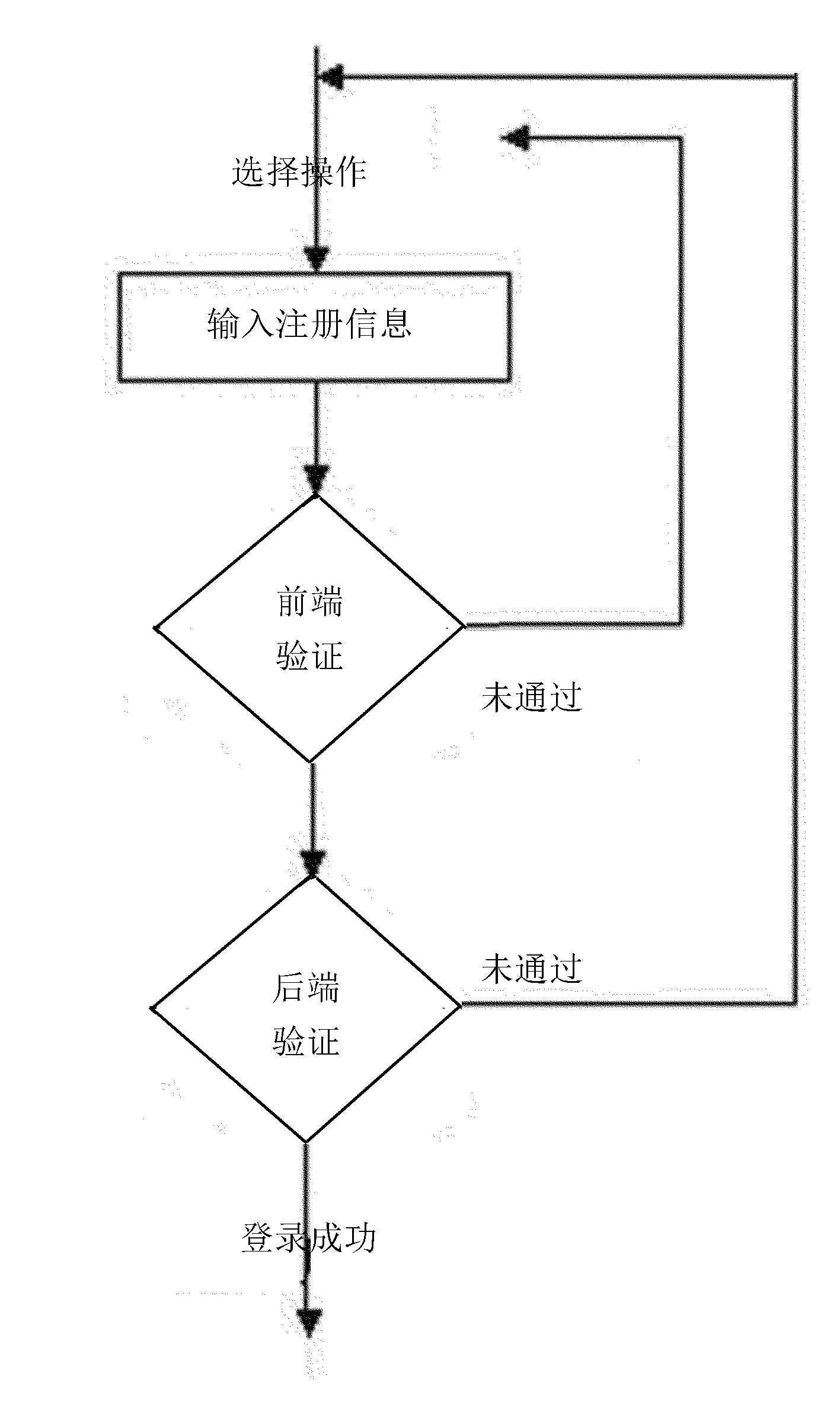
图6 收割机可视化管理员登录流程Fig.6 Log-in process of agricultural mechanic
验证收割机可视化管理员登录用户的账号是否合法核心代码如下:
//获取收割机可视化系统管理员用户名和密码
String username = request.getParameter("name");
String password = request.getParameter("password ");
//调用manage判断用户名和密码是否合法
Boolean flag1=checkUserManage.ckuserZh (name,password);
//如果登录成功则进入相关系统,如果不成功则
if(flag1&&flag2){
return new ModelAndView(this.getViewPage());
}
else
{
return new ModelAndView(this.getLoginPage());
}
通过Java语言,可以开发出收割机可视化管理的各个模块的登录及录入信息和管理页面等功能;再结合Web服务器平台,可以架构整个收割机轨迹数据可视化分析系统。
图7为雷沃重工收割机联合作业是的作业情景。收割机联合作业时,为了提高收割机的协同化作业效率,需要对收割机进行合理的调度,并对收割作业的路径进行规划。
完整的收割机调度系统主要由调度系统、调度台、基于B/S框架的可视化系统、GPS、手持终端和通信网络组成,可以实现定位、轨迹数据显示及农机调度等多种业务,如图8所示。为了实现收割机数据的可视化显示,需要对数据管理系统进行设计。考虑使用的用户较多,数据传输量和占用的数据量较大,为了保证24h不间断的服务,设计了硬件配置架构。

图8 收割机调度系统框架图Fig.8 The framework diagram of harvester dispatching system
轨迹数据分析系统主要由可视化数据库服务器和应用服务器组成,如图9所示。可视化数据库服务器主要采用MySQL数据库来承担所有子模块的数据应用,内存采用16GB×8,硬盘采用1T×8,应用服务器采用8GB×4,硬盘采用512GB×2,操作系统主要采用64位Windows操作系统。通过轨迹可视化分析,得到了如图10所示的轨迹显示图像。

图9 收割机轨迹数据可视化分析系统Fig.9 The visual analysis system of harvester trajectory datas

图10 收割机运行轨迹实时显示图像Fig.10 The real-time display image of harvester trajectory
通过轨迹数据可视化显示后,得到了收割机的实时运行轨迹。在进行大面积作业时,远程调度系统可以对收割机的行走路径做出合理的安排,以提高收割机作业的效率。在进行协同作业时,农机管理人员可以根据作业区域的面积和主要特征,对收割机做出合理的安排;另外,还可以提高农机作业的安全性,特别是一些急转弯或者存在障碍物较多的作业区块,远程调度系统可以对农机发出警报,避免作业事故的发生。
4 结论
为了提高农机调度系统的可视化水平,将B/S架构和轨迹动态显示技术引入到了调度系统的设计中。通过对动态轨迹数据的可视化显示,农机管理人员可以对农机的行驶路径做出合理的规划,在多农机作业时可以有效提高农机的作业调度分配效率。为了验证方法的可行性,搭建了收割机行驶轨迹的实时数据分析系统平台,并对系统进行了测试。结果表明:采用该方案可以成功地显示农机的作业动态轨迹,对于提高农机的自动化作业质量和作业水平具有重要的意义。
猜你喜欢
英语世界(2023年11期)2023-11-17 09:24:46
成都信息工程大学学报(2022年4期)2022-11-18 07:31:10
中国石油石化(2021年8期)2021-03-30 12:39:14
汽车工程(2021年12期)2021-03-08 02:34:30
今日农业(2019年11期)2019-08-15 00:56:32
乡村地理(2018年4期)2018-03-23 01:53:36
电信科学(2017年6期)2017-07-01 15:45:17
创新作文(3-4年级)(2016年5期)2017-05-16 09:07:27
红领巾·萌芽(2017年2期)2017-03-09 15:22:59
新农业(2016年19期)2016-08-16 12:00:18