深度学习在引力波探测中的应用综述①
2020-10-19 13:28:52胡敏超付明磊
高技术通讯 2020年9期
胡敏超 付明磊
(浙江工业大学理学院 杭州 310023)
0 引 言
引力波是一种时空涟漪,如同石头被丢进水里产生的波纹。黑洞、中子星等天体在碰撞过程中有可能产生引力波。1916年,爱因斯坦在广义相对论的基础上,提出爱因斯坦场方程。爱因斯坦认为当物质和能量的分布发生变化时,时空结构也将改变。而这种时空结构的变化将以“波”的形式传播,这就是他所预言的引力波。
但此后,引力波的探测陷入困境。直到2015年9月14日,激光干涉引力波天文台(LIGO)实现了人类历史上第1次引力波的直接探测。随后,引力波探测发展迅速。在2017年8月14日,美国LIGO和欧洲VIRGO 2个项目组在3个不同的引力波探测器几乎同时探测到一个新的引力波事件。这是人类发现的第4个引力波事件。该事件由不同机器、不同项目组共同发现,使引力波的探测成果更加真实可信。2017年10月3日,Rainer Weiss等3人在发现引力波中做出重大贡献而获得了诺贝尔物理学奖。现今,探测出的引力波事件还在不断增加。
1 使用深度滤波检测引力波信号
传统的引力波检测方式为匹配滤波方法。匹配滤波方式在引力波信号提取的工作中已经体现出其优秀的工作性能。然而,匹配滤波也有其缺陷。首先,匹配滤波的计算量巨大,使得数据处理速度非常慢。此外,匹配滤波方法的工作前提是需要一个准确的理论模板。这可能导致在理论预期之外的引力波信号无法被找到[1]。
为了促进天文学的发展,加快引力波信号的检测与研究,很多科学家进行了研究与探讨。其中,Daniel George团队在2016年至2017年期间,结合深度学习领域的相关知识,使用深度滤波的方式来检测引力波信号。
引力波的特点是强噪声、弱信号。将一个标准引力波信号白化并叠加在信噪比为7.5的噪声中[2](图1),隐藏在噪声中的引力波信号在相应频谱图中是不可见的。而深度神经网络(deep neural network,DNN)却可以直接检测到该信号的存在。这表明了深度滤波检测引力波是切实可行的。

图1 引力波叠加噪声
Daniel George团队在最初使用了最基本的卷积神经网络(convolution neural network,CNN),在经过不断的比较测试后,设计获得了一种深度卷积神经网络。结果表明,在相同条件下,这种深度滤波的正确率不低于匹配滤波,运算速度却是匹配滤波的13倍(如图2)。

图2 深度滤波和匹配滤波运算速度对比
使用深度学习来检测引力波的另一个优势是神经网络可以进行迁移学习[3]。将设计好的模型在一个大型数据集中完成训练,只需要进行参数微调即可在其他数据集上使用。这种无监督模型使用范围更广,无需匹配滤波方法一般的完备的理论模板,可自动区分各种噪声,并检测出引力波。这种方法已经成功的在LIGO真实数据中检测出前3个引力波信号数据[4]。
此后,不断有学者在深度学习方法的基础上,使用新的方法来优化其探测模型的性能。例如Shen等人[5]引入去噪自编码器(denoising autoencoder,DAE)来对引力波去除混合的高斯噪声来还原信号。Li等人[6]对高斯噪声污染的模拟引力波信号进行小波分解,以此提高分辨准确率。Fan等人[7]使用多个来源的信号数据来加强神经网络对参数估计的性能。Chua等人[8]使用降阶建模方式来表示波形数据,以此推导并搭建模型。这些方法为深度学习和引力波探测的结合提供了更多思路。
2 深度学习在引力探测数据分析中的应用
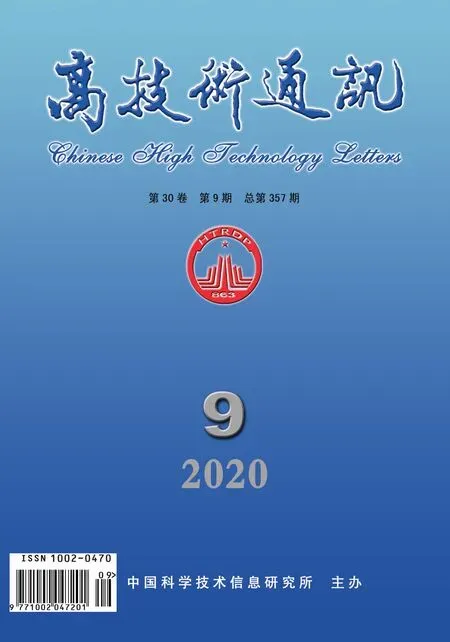
随着技术的发展,探测器的灵敏度也不断提高。但所有方法都受到探测器噪声的限制,其中最难以分辨的是瞬态非高斯噪声信号,称为“毛刺”(glitches)。“毛刺”不仅会对数据产生影响,并且在某些情况下会掩盖引力波信号[9]。为了解决这一问题,Zooniverse平台主办的公民科学项目中就有一个引力监测(Gravity Spy)项目[10]。在初始的数据集中,包含了22类毛刺的8 583个样本(如表1)。这些分类和相关的典型形态由LIGO、Gravity Spy和一些公共学科等科学家组合设定,并且随着时间的推移,数据集也在扩展。
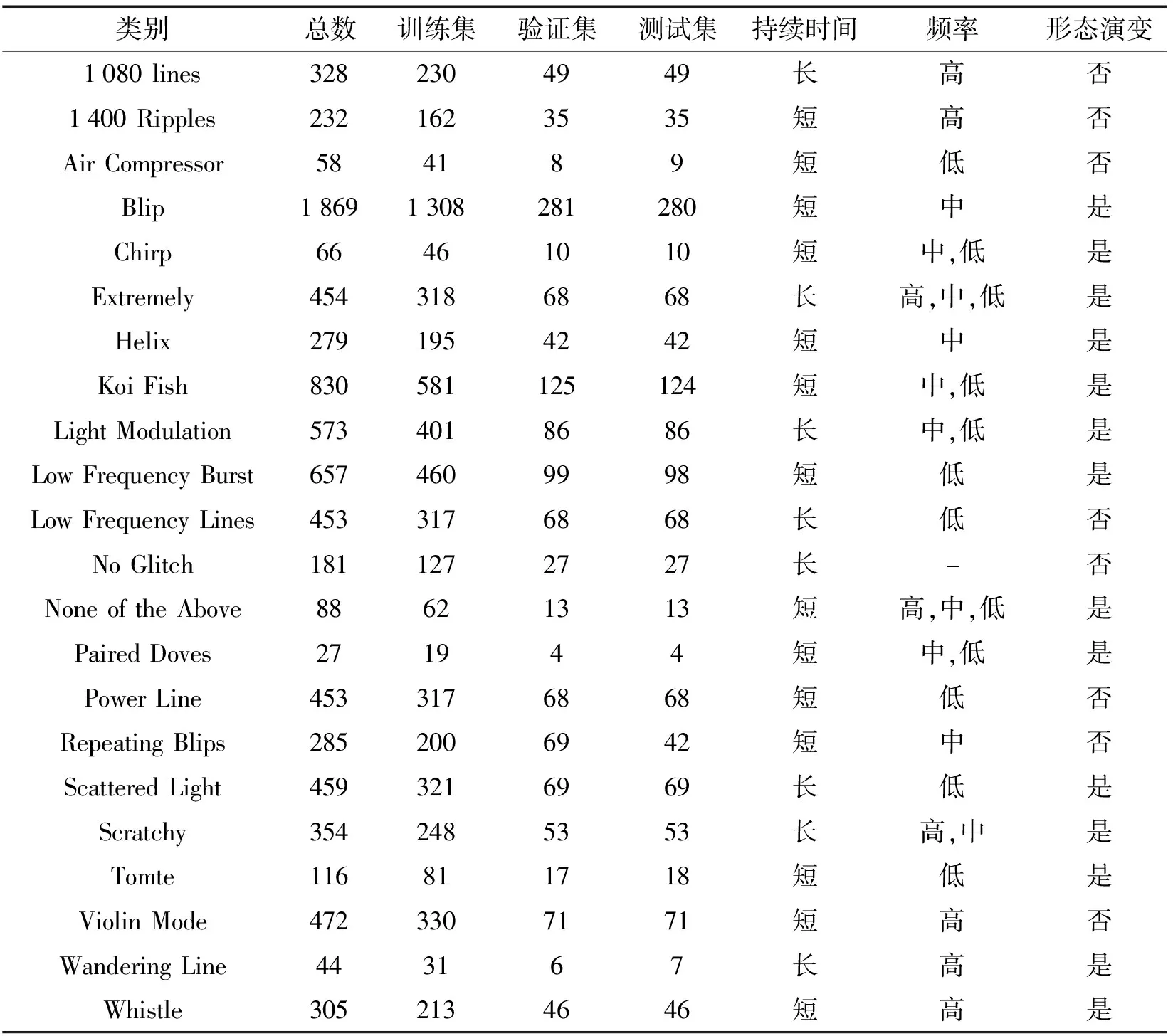
表1 22类毛刺
随着技术不断发展,人们对于毛刺的研究与认识也更加深入,然而仍然还有许多未知的毛刺类别。为了更全面的探索新的毛刺类型,Bahaadini等人[11]基于深度学习,提出了一种判别嵌入函数,用作聚类任务的特征提取器。该方法利用了深度学习可以进行迁移学习的优势,即这种经过训练的嵌入函数将从已知毛刺类中提取到的特征信息用于未知毛刺类(如图3),使其可在未知毛刺样本中找到潜在的新毛刺类别。

图3 深度神经网络示意图
Bahaadini等人[12]还提出了一种深度多视图卷积神经网络来自动分类毛刺,来提高分类的整体准确性。与传统的仅使用单视图模型的标准方法相比,他们提出了4输入模型,即使用毛刺的4个不同的持续时间0.5 s、1 s、2 s、4 s来绘制毛刺(如图4)。测试分析结果表明,具有较短毛刺的单视图模型对于较短毛刺的类性能更好,具有较长毛刺的单视图模型对于较长毛刺的类性能更好。而他们所提出的多视图模型比单视图模型的分类精度高。除了深度学习方法,也有一些学者希望用小波分解等信号分类方法来对毛刺进行分类,但虽然速度更快一些,但精度却不如深度学习方法高[13]。

图4 具有4个视图的Helix glitches的示例
3 深度学习检测引力波信号的具体实现方法
本文为了更好地了解深度学习在引力波探测中的工作方式和其优劣性,从数据集的整理、卷积神经网络的设计应用到结果的对比进行了研究与探讨。
3.1 数据集
本文所使用的是来自LIGO Hanford、LIGO Livingston和VIRGO 3个来源的引力波数据以及模拟的高斯白噪声。引力波数据(如图5)的采样频率是4 096 Hz,对应的是1 s时间的4 096个数据点,每个来源1 000组数据。本文将3个数据集的数据进行整合,使得3个来源的数据可以在一起进行对比使用。训练集中的奇数组数据是3×4 096的引力波数据,偶数组是3×4 096的模拟高斯白噪声数据,使用的训练集数据总数为100~800组。测试集同训练集相反,偶数组数据是引力波数据,奇数组数据是模拟高斯白噪声数据,总数为100组。使用有监督学习方式,给每组数据打上标签,True代表引力波数据,False代表噪声数据,进行二分类判断。
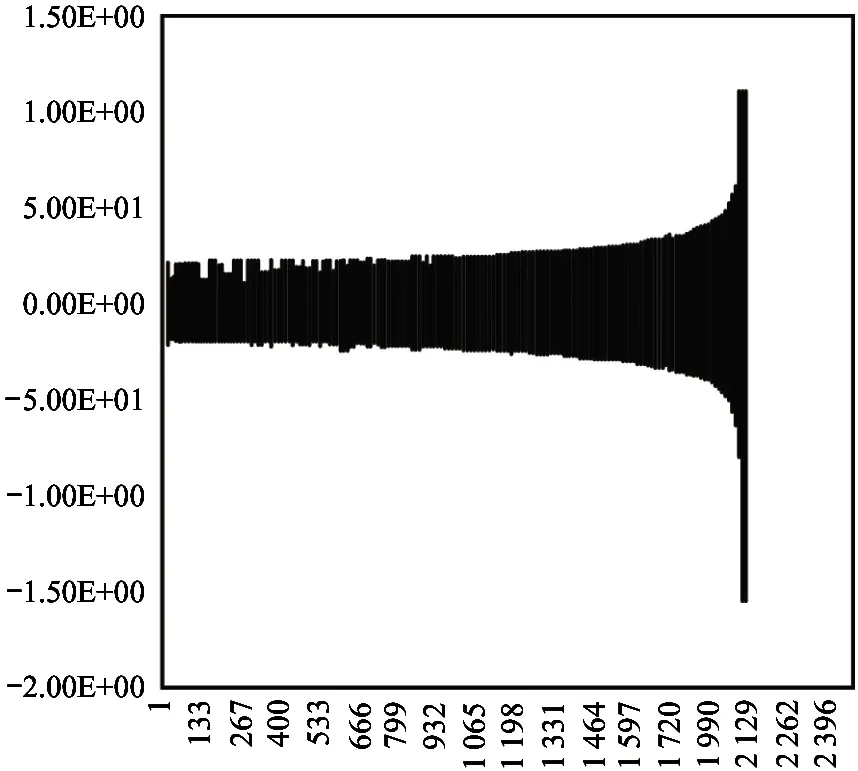
图5 引力波信号
3.2 模型设计及应用
选择好训练集和测试集之后,设计使用卷积神经网络(CNN)模型来进行训练。为了使得模型的正确率和训练速度之间进行平衡,对模型的构成进行了分析与测试,最终得到了相对较好的模型(图6)。
图6 网络模型示意图
模型包括3个卷积层和3个池化层。3个卷积层来提取特征,使用的卷积核分别为3×16,1×16,1×16。每1个卷积层后都有1个池化层,池化方式使用最大池化。然后使用1个压平层将数据压平。最后是全连接层,在第2层使用softmax作为二分类的输出。训练集中的数据训练200个循环,训练集数据从100~800组不等,训练完毕后,进行测试集正确率的比较。
3.3 结果对比与分析
训练集在训练结束时的正确率都到了100%,测试集的正确率随着训练集样本数而变化(表2)。当训练集的样本数为100时,虽然训练集的正确率为100%,而测试集的正确率只有91%,说明训练集样本数不足而导致了训练集过拟合。随着训练集的增加,测试集的正确率不断上升。当训练样本数为500组数据时,正确率达到了100%,损失值也仅有0.004。随后样本数的增加对于正确率的影响波动不大,正确率在97%~100%之间。
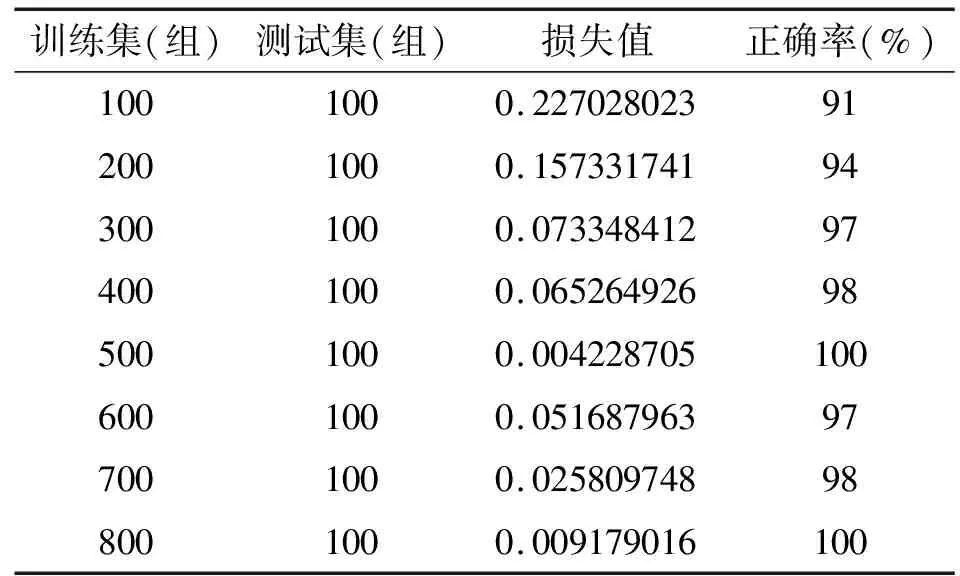
表2 测试结果
4 结 论
随着科技的发展,人们对于宇宙未知的探索欲望不断增加,引力波的探测为天体物理学展现了新的方向。在引力波的探测中,匹配滤波依然是一种优秀的方式,然而其缺点也让人们希望找到新的出路。随着深度学习的发展,其在数据处理中的高效性能引得人们的青睐。结合深度学习的方式来探测引力波变成了新的热门课题。也取得了不错研究成果。他们的研究也证明了深度学习在引力波探测中有着广阔的应用前景。然而此类方法依然有许多的问题待解决,例如重力间谍项目表明了毛刺的难以分辨。如何使用深度学习来更好地分辨出未知各类噪声,更好地探测出引力波事件,还需要一个漫长的发展过程,相信随着深度学习的不断发展,各类模型的不断进步,其在引力波的探测中会有更好的应用方式。
猜你喜欢
装备制造技术(2020年4期)2020-12-25 05:26:20
中华养生保健(2020年7期)2020-11-16 01:14:26
现代装饰(2020年4期)2020-05-20 08:56:06
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
装备制造技术(2019年12期)2019-12-25 03:06:26
制造技术与机床(2017年10期)2017-11-28 05:22:07
电镀与环保(2017年2期)2017-05-17 03:42:21
科学大众(中学)(2016年9期)2016-12-29 18:36:41
家教世界·创新阅读(2016年11期)2016-12-27 18:49:15
天津护理(2016年3期)2016-12-01 05:40:01