高超声速飞行器气动热流载荷数据高效传递及包络处理方法
2020-10-19 03:12王东伟王志瑾
航天器环境工程 2020年4期
王东伟,王志瑾
(南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京 210016)
0 引言
高超声速飞行器飞行时的表面热环境严酷,温度最高可达上千摄氏度[1]。因此需要设计热防护系统,保护飞行器结构以及飞行器内部仪器的正常工作。热防护系统设计首先需要根据飞行器表面热流密度分布计算各个位置的最高温度,而热流密度通常是在细密的气动网格下通过数值模拟计算得到的;另外,不同的飞行弹道下,飞行器表面热流密度分布是不同的。当需要用气动热流密度作为输入进行热防护系统设计时,应根据飞行器的具体结构特征建立一套结构热分析网格。结构热分析网格与气动网格不是同一套网格,节点数和节点位置也不重合,因此,气动网格上的热流密度数据无法直接施加到结构网格上作为热设计的输入条件。有多种方法可将数据从源场网格(气动网格)准确传递到目标网格(结构网格)点,如有限元形函数插值法[2]、距离加权平均插值法[3]、最小二乘法和无网格插值法等[4]。此外,滕春明等[5]采用基于最小形变能[6]的方法实现了气动载荷的传递;王仁宏等[7]针对机械应力提出了Lagrange函数求极值法;Goura等[8]提出了常体积转换(CVT)法,史中军[9]和程兴华[10]在该方法的基础上进行改进,提高了插值精度。
本文综合考虑数据精度和计算效率,着眼于在CVT法的基础上改进选点条件,提高计算效率,以适应致密气动网格数据规模较大时的情况。同时,针对某个设计节点,不同飞行轨道工况下有不同的热流‒时间曲线。为了保证热防护系统能够经受住所有极端热环境的考验,仅仅计算所有节点处一两个轨道工况下的温度显然是不够的,而对所有轨道工况逐个进行全机热分析计算则耗时巨大,因此,将所有轨道的热流‒时间曲线进行包络处理后作为总输入是比较合理有效的方法。本文就此提出包络方法,旨在从构成所有热流‒时间曲线的离散点中准确筛选出包络曲线需要的载荷离散点,以保证最终拟合的曲线在任意时刻都代表所有轨道曲线中的最大热流值。
1 CVT 数据传递方法及改进
CVT算法是在处理流固耦合问题中的边界节点位移传递时被提出的。该方法通过选取网格点构造空间四面体来进行插值计算。相较于距离加权平均插值法[3],CVT法不需要拟合经过全部数据点的空间光滑曲面,也不用构造全局的传递函数,因此可大大提高计算效率,且精度高、适用性广,可用于多种连续变化的数据(如温度、应力、位移等)的传递。
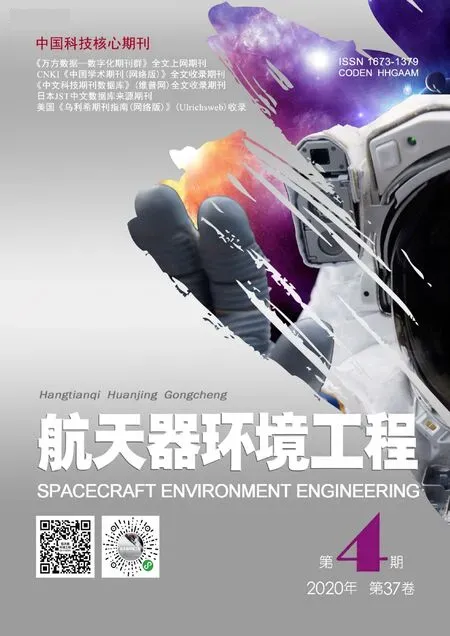
如图 1 所示,点 a(t, xi)(i=1, 2, 3)是目标场的插值点,Ai(t, xA,ij)(i, j=1, 2, 3)是在源场上找到的与a点距离最近的非共线三点,设点a′是点a在由Ai三点确定的平面上的投影点,其满足如下平面和投影关系:

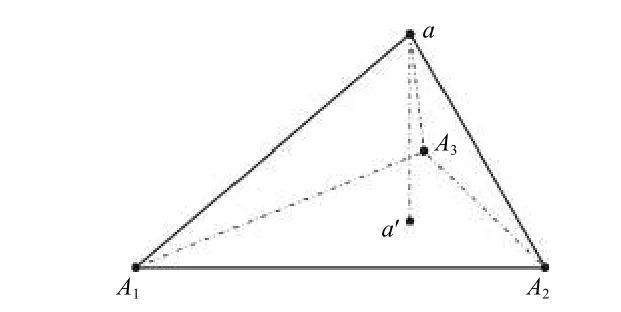
图1 CVT 方法插值点投影Fig. 1 Interpolation point projection by CVT method
为了让投影的结果更准确,减少边界或数据梯度较大处易出现的插值误差,在点Ai的选择上,需要满足如下要求:
1)投影点a′需要落在△A1A2A3内部或刚好在其某一条边上;
2)Ai三点均属于同一个单元,即三角形内部不包含其他的源场网格点;
3)在符合上述要求的前提下,优先选择距离最近的3个点。
一些文献中,在选择源场点时通常优先考虑点的位置关系,将三点是否属于同一个源场单元放在最后进行判定,从而导致一旦拓扑关系不符合要求就要重新选点并重复之前所有的流程。当源场和目标场网格点规模较大时,这种处理方法会极大影响数据传递的效率。
为了提高传递效率,本文改变选点方式,直接在同一个单元中选点,可省略拓扑关系判定的步骤,从而大幅提升选点速度;同时,可加强CVT方法的兼容性,使算法除了三角形网格之外,同样也适用于四边形网格的源场。具体选点方法如下:
1)针对目标场上的每一个点和源场上的网格点求解距离,并根据距离由近及远的原则对源场点进行排序;
2)选取距离最近的点,统计包含该点的所有源场单元,即以该点为公共点的源场单元集。如图2所示,a是目标场上的点,K是源场中距离点a最近的点,图中的源场单元集即为需要统计的单元。
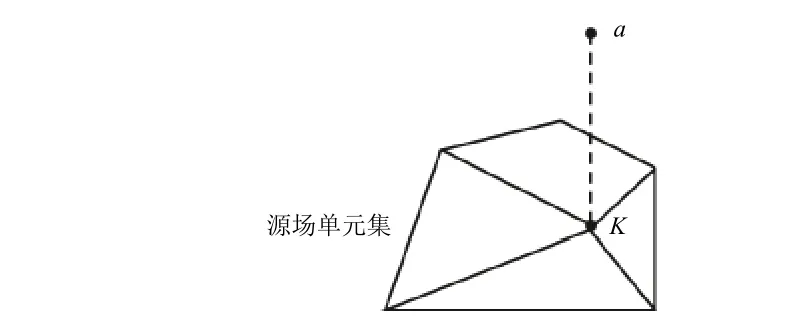
图2 目标点与源场单元集的关系Fig. 2 Relationship between the target point and the source grid set
3)将目标点逐个投影到源场单元集中各单元所在平面,判定投影点是否落在某单元中任意三点构成的三角形内。在三角形单元中,三点的选择是唯一的;如果源场有四边形单元,可以将1个四边形划为2个三角形分2次进行投影判定。当投影点落在某三角形内部就可以确定需要进行数据传递的源场的3个点。
4)当包含最近点的所有单元均不满足投影点在其三角形内部时,则排除该最近点,并选择步骤1)中排序在其后的下一个源场点重复步骤2)、3)的操作,直到投影点出现在某三角形内部,三点才选择完毕。
投影点a′与Ai三点分别构成三角形(如图3所示),可根据这些三角形的面积来判定投影点是否在△A1A2A3内部:

其中:S 代表△A1A2A3的总面积;S1代表△a′A2A3的面积;S2代表 △A1a′A3的面积;S3代表 △A1A2a′ 的面积。
图3 投影点与三点构成的三角形Fig. 3 Case of point projection inside a triangle
之所以在上述的选点过程中加入了步骤4),是因为在部分边界处,容易出现狭长形的低质量网格。如图4所示,投影点a′位于△A1A2A3中,但由于其位置接近边线A1A3,且△A1A3A′是狭长形网格,因此与a′距离最近的点是 A′,而A′显然不是△A1A2A3的顶点之一。在这种情况下,步骤4)就能排除投影位置过偏以及狭长网格的影响。
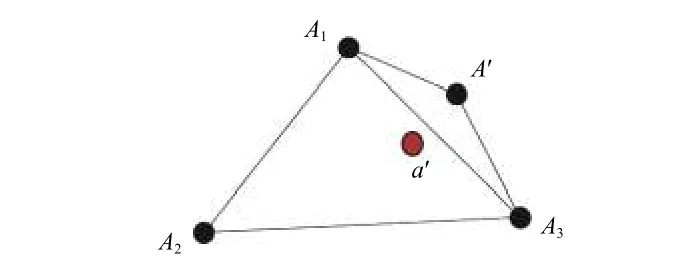
图4 投影点位于狭长网格附近示意图Fig. 4 Case of point projection near a narrow grid
由于是在三角形中进行插值,所以通过三角形面积坐标来构造插值函数并采用线性插值,可以在保证精度的同时大大简化数据计算,提高插值效率。点a′在△A1A2A3中的三角形面积坐标为

其中 μi(i=1, 2, 3)是面积坐标的 3 个分量。将 μi直接作为线性插值的形函数,设源场3个点Ai(i=1, 2, 3)上的数据分别为 mi(i=1, 2, 3),插值公式为

m′就是目标场点最终通过传递得到的结果数据。
2 多轨道热流‒时间包络曲线方法
不同轨道下的热流‒时间曲线的包络也是载荷前处理中非常重要的一环。对载荷曲线进行包络处理虽然看似较为保守,但考虑到对高超声速飞行器进行全机防热设计时,在每一组热流‒时间曲线下的传热计算以及防热结构的参数设计非常耗时,每一轮的设计周期往往很长,因此提前确定包络载荷曲线可以显著提高工程效率,同时又能满足工程要求。每经过一轮热流节点数据映射,结构网格上的节点就会得到一个热流‒时间离散点群,这些离散点代表该结构点在一个轨道工况下每隔一段时间采集到的外表面热流密度。通常需要将各个离散点群进行拟合或插值等预处理操作,而在轨道数量不多的情况下,这样的预处理虽然也能保证一定精度,但略显烦琐。
本文直接对原始离散点进行对比,无须对每个点集数据进行预处理插值,而是对相邻时刻的2个离散点进行线性拟合,在每个线性段上作单独处理,直接得到包络载荷离散点集。具体算法如下:
1)选取任意2条轨道的离散点集P和Q,将其中1组点集P用直线连接成1条折线段。
2)在每1条线段所占据的时间段内搜索Q中的离散点,当Q中的点c位于线段上方或刚好在线段上时,就将该点加入包络点集T;否则就取线段上与点c在同一时刻的点加入T。
3)当Q中的点筛选完毕后,将P和Q关系互换,重复前2个步骤。
4)上述步骤结束后,选取一个新的轨道,对新轨道的点集和T重复上述3个步骤,生成一个新的包络点集T1。
以此类推,直到所有轨道处理完毕,最终生成的点集Ti‒2(i代表轨道总数量)就是需要的载荷包络点集。
如图5所示,设图中的线段是由点集P中相邻时刻2个点连接而成的。3个内部填充的三角形是点集Q中的3个点,分别代表与线段3种不同的位置关系。经过算法处理后,图中圈出的3个位置点被加入包络点集。
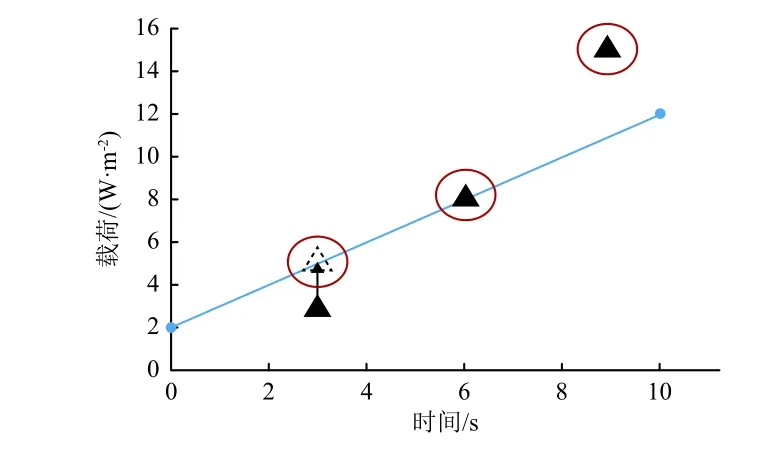
图5 生成包络点集示意Fig. 5 Generation of an envelope point set
在每2个相邻时刻的热流‒时间点之间重复该处理方法,即可生成完整的包络点集。
3 算例验证
本章根据上面提出的方法进行编程,对不同网格热流数值的传递方法和不同轨道包络多轨道热流‒时间曲线处理方法进行验证。
3.1 热流数据传递算例
图6(a)是一个曲面模型上的源场(气动网格)热流密度云图,图6(b)是传递后的目标场(结构网格)上的热流密度云图。源场中多采用较密的三角形单元,目标场中主要采用平面四边形单元。从图6可以看出,源场的热流密度值经过改进的传递算法映射到目标场后,2个网格场中的云图分布趋势和数值大小基本一致。另外,通过计算可知,2种网格下的总热通量仅相差0.4%。
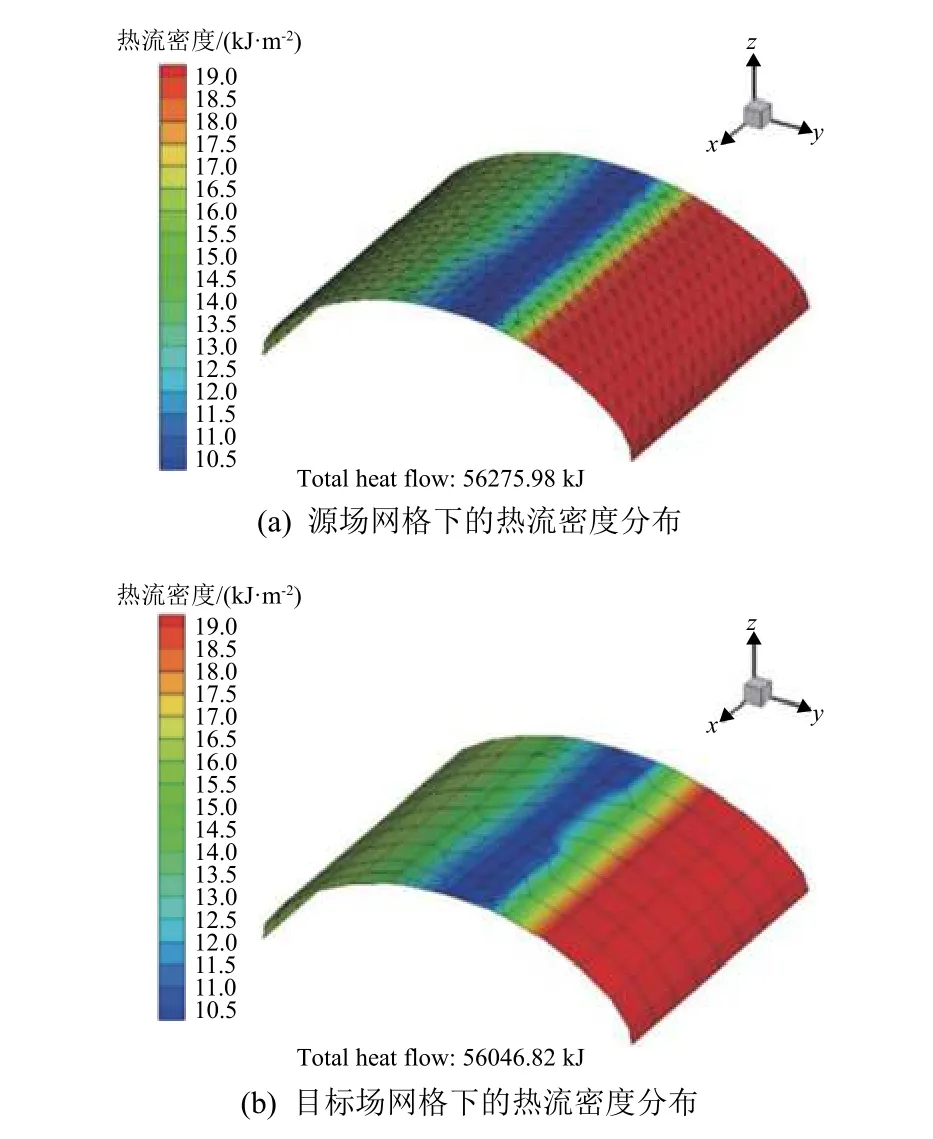
图6 热流传递结果对比Fig. 6 Comparison of calculated results for heat flow transfer
将本文提出的选点方法与传统CVT的选点方法分别进行编程并在同一台计算机上运行,计算图6的模型,本文方法耗时0.998 s,传统CVT法耗时1.223 s,证明了本文选点方法的高效性。为了验证算法在大曲率边界处的稳定性,选取一个三维垂尾模型再次进行数据传递测试,结果如图7所示。可以看到源场和目标场中垂尾前缘处的数据大小和云图分布基本一致,证明算法对于复杂边界处的处理也符合要求。
本文算例中源场的气动网格与目标场的结构网格密度相差不大,考虑到工程中源场网格密度远远小于结构网格密度,因此实际误差会更小。
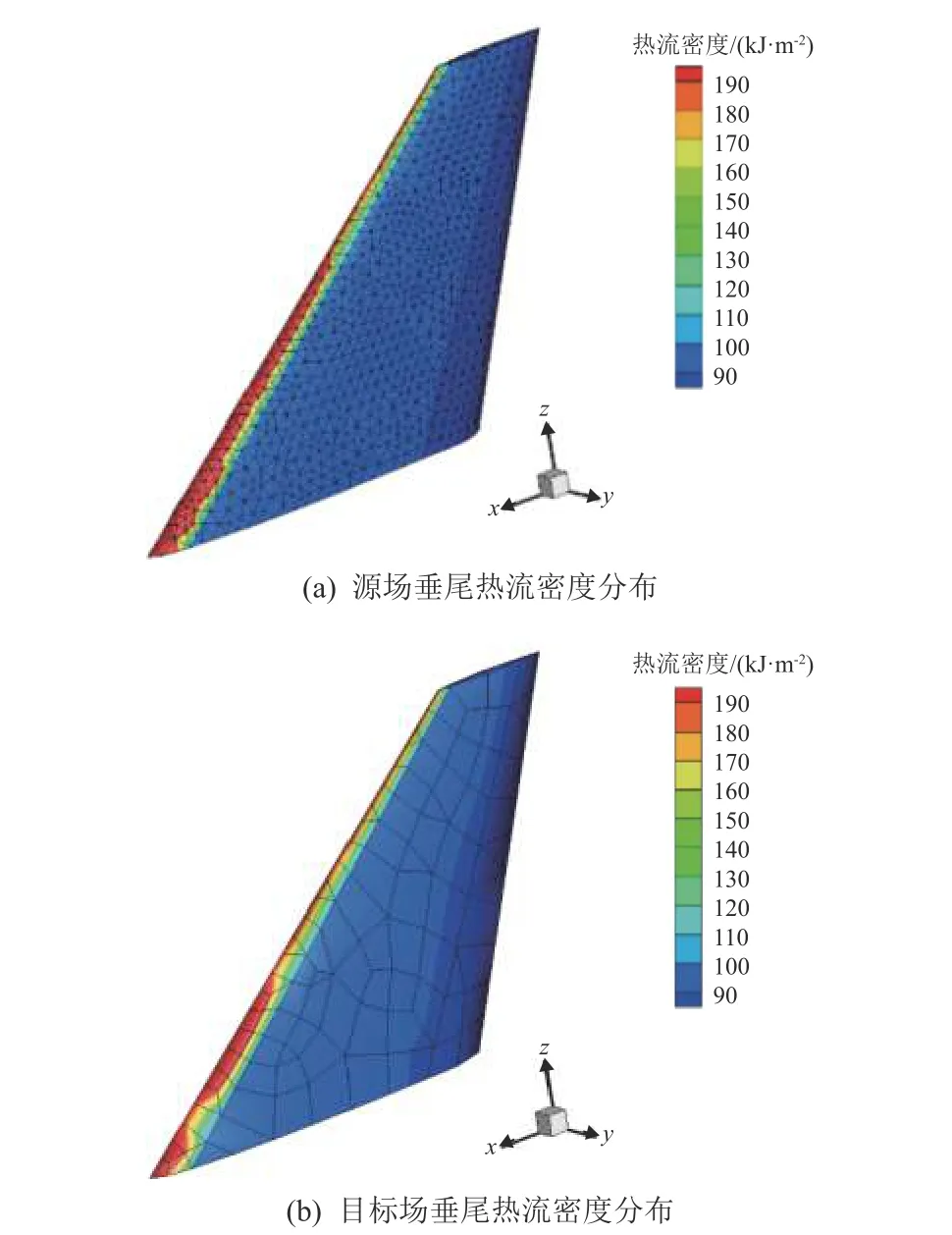
图7 垂尾热流传递下的计算结果对比Fig. 7 Comparison of calculated results for vertical tail heat flow transfer
3.2 多轨道热流‒时间曲线包络方法验证
采用假设的2组轨道热流‒时间数据来验证热流包络算法。为了尽可能全面考核复杂热流情况下本算法的可靠性,所选取的2组热流‒时间离散点应有以下特征:
1)相邻载荷点间的时间间隔不同;
2)2组载荷施加的总时长不同;
3)载荷曲线中含有载荷突变,不是平滑曲线。
2组离散点的具体数据分别如表1和表2所示,载荷曲线如图8所示。可以看出:轨道1的时间间隔设为 5 s,总时长 100 s;轨道 2 的时间间隔设为 3 s,总时长 93 s;2 组载荷曲线都存在一定的载荷突变。
按照第2章所述的包络曲线算法得到包络载荷曲线,为了更加直观地展示包络效果,将原始载荷曲线与包络曲线放在同一幅图中进行对比,如图9所示。可以看出,将包络点集的载荷点用线段连接起来后,恰好包住了2个初始轨道的载荷‒时间曲线,实现了包络曲线任意时刻的载荷值都在所有载荷曲线中最大的算法目标。
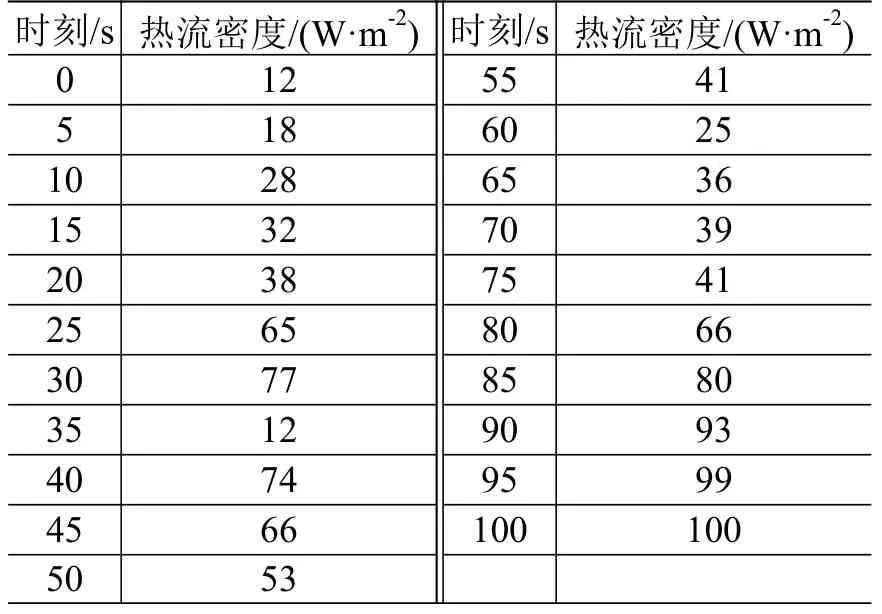
表1 轨道 1 的热流‒时间载荷点数据Table 1 Load data of heat flow vs. time point for orbit I
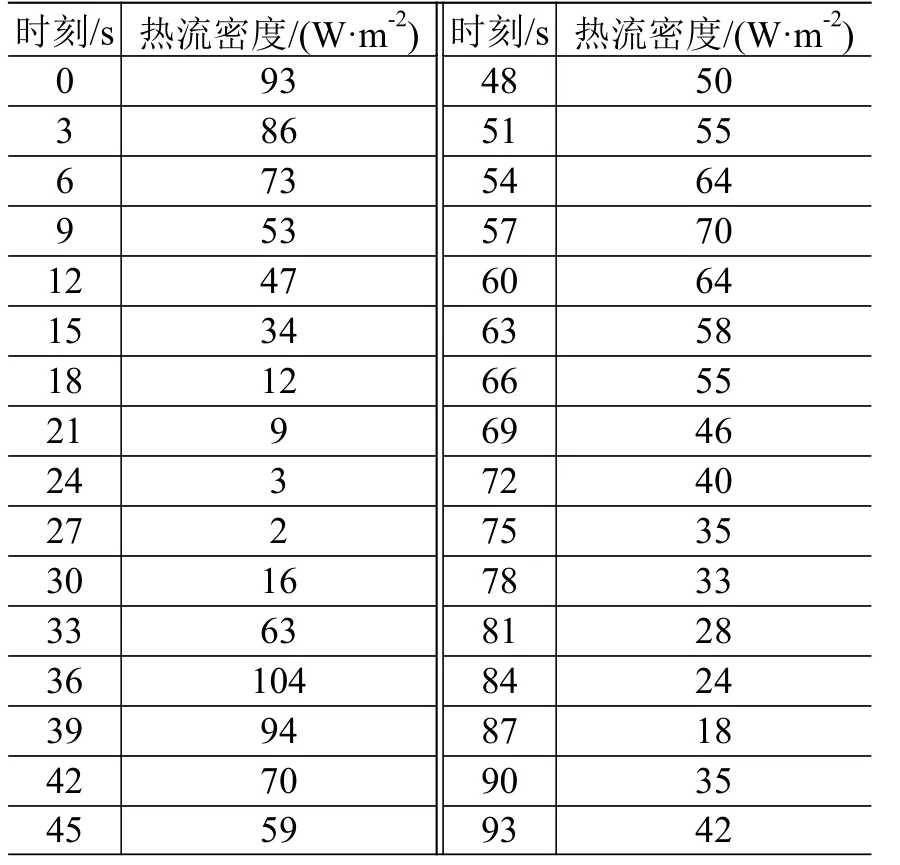
表2 轨道 2 的热流‒时间载荷点数据Table 2 Load data of heat flow vs. time point for orbit II
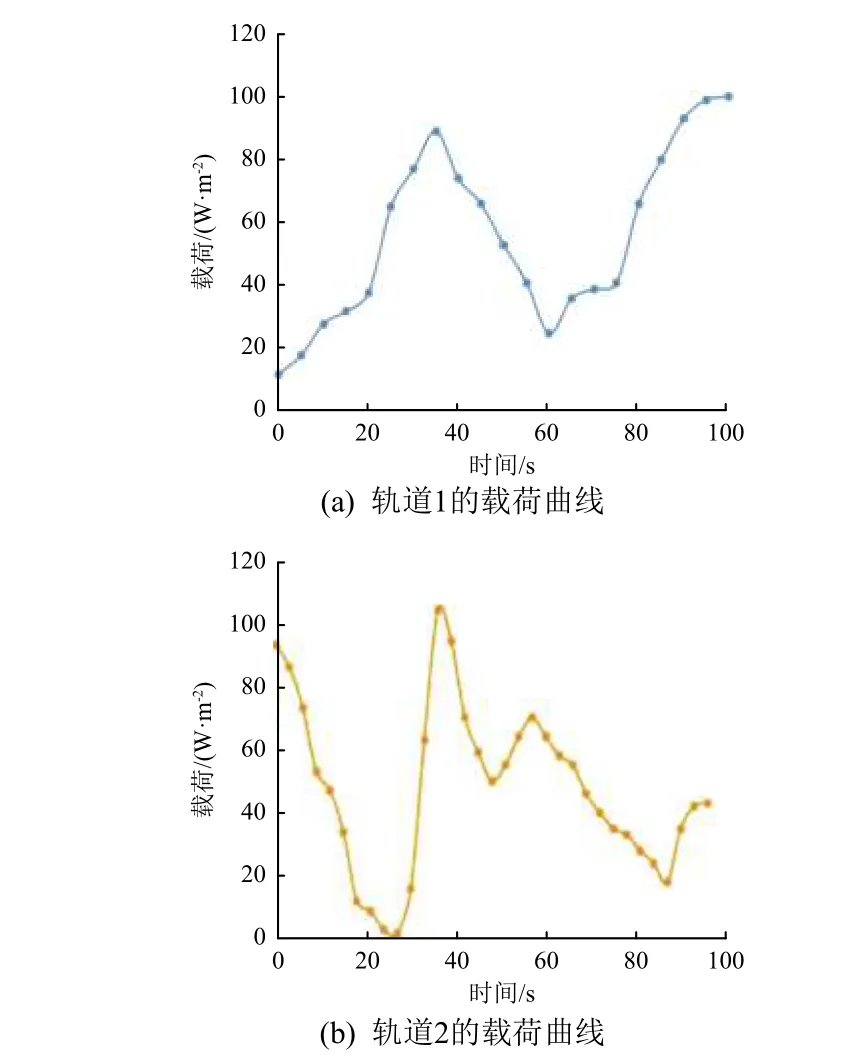
图8 2 组热流‒时间载荷曲线Fig. 8 Illustration of two sets of load curves
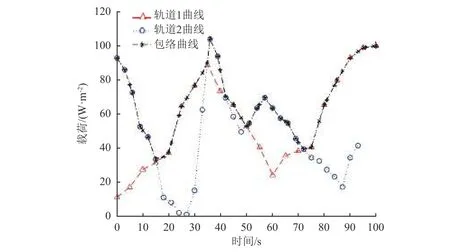
图9 包络曲线与 2 条原始曲线的对比Fig. 9 Comparison among envelope curve and two original curves
4 结束语
本文针对高超声速飞行器在进行热防护系统设计时经常遇到的载荷数据前处理问题提出了一套高效的解决方法,在满足精度要求的情况下实现了不同网格场的数据传递以及多轨道载荷曲线的包络点集生成功能,显著提高了计算速度和效率。
同时,该方法不仅适用于热流密度载荷,包括温度、应力、空气动力等一系列载荷类型都可以采用本文提出的算法进行前处理,从而达到简化流程与节省计算用时的目的。
猜你喜欢
导航定位学报(2022年3期)2022-06-10
军事文摘(2022年8期)2022-05-25
新高考·高一数学(2022年3期)2022-04-28
实验流体力学(2021年4期)2021-09-15
航天器工程(2021年2期)2021-04-27
学生天地·小学低年级版(2019年5期)2019-06-05
西部资源(2018年5期)2018-11-06
新生代(2018年16期)2018-10-21
城市地理(2017年9期)2017-11-02
试题与研究·中考数学(2016年4期)2017-03-28