电动力系绳离轨系统关键技术简析
2020-10-19 03:13李爱军李艳芳王长青陈书敏
航天器环境工程 2020年4期
李爱军,李艳芳,2,王长青,陈书敏
(1. 西北工业大学 自动化学院,西安 710129; 2. 榆林学院 能源工程学院,榆林 719000)
0 引言
随着航天技术的飞速发展,越来越多的国家有能力将自己的航天器发射到太空,尤其是低地球轨道(LEO)的商业发射次数越来越多,但同时产生了大量的空间碎片,占据了宝贵的轨道资源,对在轨航天器安全构成很大威胁,因此清除空间碎片成为重要的航天任务之一。空间碎片是指在地球轨道上任何失去价值的人造物体,主要包括无效航天器、废弃的运载火箭上面级/末级、解体的航天器碎片以及与空间任务有关的碎片。据美国空间监测网(SSN)统计,截至2019年,空间正常运行的有效载荷数量约为5029个,而可追踪观测的空间碎片约有14 495个,已远超有效载荷的数量[1-2]。早在2006年,SSN即预测,低地球轨道600~1000 km之间的空间碎片密度已接近饱和,即使没有新卫星发射也会发生Kessler效应[3]。NASA对空间环境演化的模拟结果表明:除了实施空间碎片减缓策略,必须从2020年起每年至少清除5块大型碎片(主要是废弃的火箭末级/航天器)来降低空间碎片的危害[4]。
清除空间碎片的技术可分为主动离轨技术和被动离轨技术。前者主要包括化学推进和电推进技术,不需要依赖自然环境;后者包括空气增阻和电动力系绳离轨,需要利用大气阻力和地球磁场等自然因素。对于LEO空间碎片,单纯依靠大气阻力实现离轨需要几十年甚至几百年;而电动力系绳离轨系统具有质量小、成本低、不消耗燃料和离轨时间短等优点,是清除LEO碎片的理想选择之一[5]。
本文从电动力系绳系统的国内外研究现状入手,对该系统的关键技术研究进行综述,描述离轨系统的动力学与控制研究内容,预测系统离轨时间,介绍系统离轨装置设计,最后对进一步的研究方向以及重点、难点进行展望。
1 电动力系绳系统国内外研究概述
电动力系绳系统(electrodynamic tether system,EDT)的概念在20世纪七八十年代被提出,获得了国内外学者的关注与深入研究[6]。电动力系绳系统的离轨原理是:导体系绳以一定的速度在低地球轨道切割地球磁感线产生感应电动势,通过等离子接触器与电离层形成闭合回路产生电流,此电流与地磁场相互作用产生电动力;将电动力系绳系统加载于碎片,且令系统电动力与碎片运动方向相反,可使碎片减速降轨直至最后进入大气层烧毁。1996年,Loftus设想利用EDT离轨失效航天器,此想法的初步研究工作由Forward完成,并在同年6月公布结果——对于轨道高度1000 km、质量为1000 kg的失效航天器,几周内就可以完成离轨,且系绳系统的质量仅占航天器总质量的1%[7]。
对于EDT离轨技术的研究,美国、欧洲以及日本开展得较早,已经进行了一些在轨试验(见表1),如:美国的 Terminator Tether、TSS-1R、Remora Remover、ProSEDS及EDDE试验项目;欧洲的RemoveDebris、e.Deorbit计划和DEOS任务;日本的SDMR、HTV-6(空间碎片微型清除器);德国的RetroSats(制动火箭星);瑞士的CleanSpace-One等[8]。我国关于空间碎片清除技术的首次研讨会于2014年在天津召开,目前对EDT离轨技术的研究还处于理论阶段。
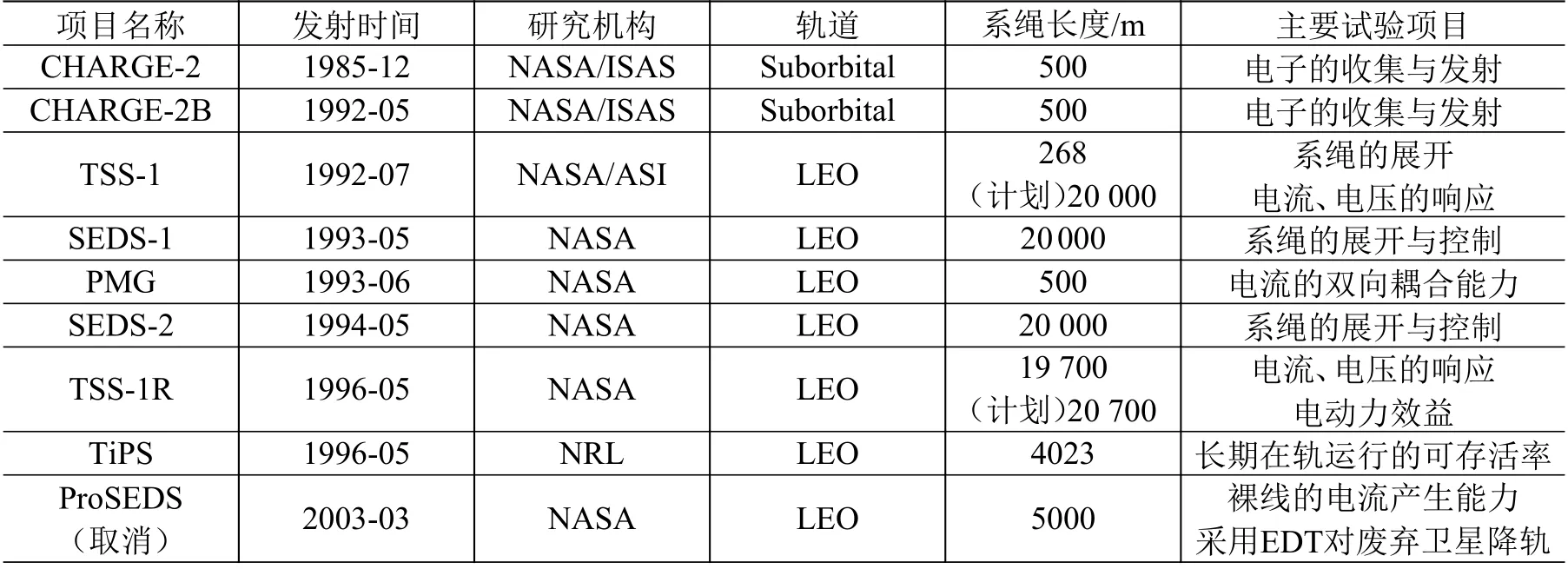
表1 EDT相关立项研究、样机试验以及在轨试验情况[9]Table 1 Statistics of projects, prototype testing and on-orbit testing of EDT

表1(续)
2 电动力系绳离轨系统动力学与控制
2.1 EDT 离轨系统动力学
EDT离轨动力学主要研究系统建模、电动力对系统轨道的影响以及如何调节系绳电流使系统轨道发生期望的变化。EDT离轨系统在空间运动的动力学情况复杂,包括受外力(如大气阻力、时变安培力、太阳辐射压力、J2摄动等)干扰、系绳自身运动无限自由度、系统面内外运动耦合,等等。利用EDT执行离轨任务,首先要对系统的运动特性进行分析,结合一般的分析力学、理论力学以及相关的电动力学,建立系统动力学模型。文献[10]对EDT模型进行了详细的介绍。在实际研究和应用中,应依据不同任务的要求,选择合适的EDT模型。
EDT离轨过程中,一方面,系绳电流过大会导致系绳熔断;另一方面,系绳过长会增加缠绕和在轨碰撞的风险,因此需要研究系绳的姿态动力学。此外,空间碎片离轨过程中轨道机动时间较长,还必须考虑洛伦兹力对轨道的影响。
2.2 EDT 离轨控制
EDT离轨控制主要研究系绳展开和振动控制。
EDT执行离轨任务的先决条件是将系绳展开到指定位置。EDT展开控制是典型的非线性、欠驱动系统,因为绳长变化可能导致系绳剧烈的振动,所以控制器的设计很关键。在早期研究中,Misra等提出开环控制方法[11]。而开环控制易受外界干扰、易回弹,因此张力控制律被提出。1975年,Rupp第一次尝试用张力控制律来控制系绳长度及其变化率来抑制系绳面内摆动[12]。王长青等设计比例微分和滑膜控制器,实现对系绳系统在大气阻力摄动下的展开跟踪控制[13]。Sun等研究分数阶张力控制律以实现系绳的稳定展开[14]。Wen等针对面内系绳展开提出解析反馈法,通过特殊的饱和函数解决了系绳张力的限制[15]。以上研究都是针对EDT的二维展开,而三维空间EDT展开控制问题则需设计混合控制器来稳定面内外运动。例如,Wen和黄静等分别通过调节系绳拉力和电流来控制系绳展开[16-17]。总之,设计控制器首先要确定试验目的,并据此选择合适的系绳展开方式。
在执行离轨任务过程中,电动力会导致EDT系统姿态不稳定。当轨道较高时,地磁场和等离子体密度都很小,因此系绳电流较小,系绳摆幅不大且增加缓慢。当EDT进入低地球轨道时,随着地磁场和等离子体密度的增大,系绳电流也变大,长时间运行下,系绳摆幅会不断变大甚至翻转以至于起旋;若不加以控制,则系统的离轨效率会大大下降,这是因为振动导致电动力方向存在时变,使离轨时间变长。此外,由于系绳本身柔性大、阻尼小且易受电动力干扰,所以需要设计控制器来抑制系绳振动。EDT常见的振动形式有纵向、横向振动以及跳绳运动,参见图1所示,图中电动力系绳连接主星和子星(主星可以是卫星、航天器等,子星可以是空间碎片、卫星等)。
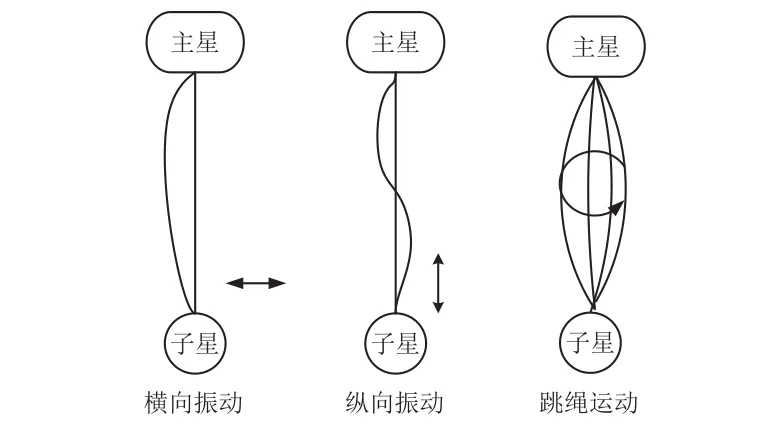
图1 EDT 的几种基本振动形式Fig. 1 Several libration forms of EDT
国内外学者在EDT振动控制方面进行了大量研究,本文整理相关文献,归纳出3种主要解决途径:
1)通过耗散减少系统振动能量,比如机械耗散和波吸收机制。Mantellato等提出由导电线、惰性系绳结合阻尼器构成耗能系统[18];Williams等设计了一种移动系绳装置,来降低系绳弹性横波的传播速度[19]。
2)控制EDT的能量输入,例如零净能量和能量输入受限。Williams研究基于零净能量输入的能量速率反馈控制器来稳定EDT的振动[20]。Li等利用能量振动控制方法来抑制EDT的横向振动[21]。
3)改变系绳电流和轨道要素长期变化的关系。Corsi等通过调节系绳电流大小来限制其振动幅值,实现系绳系统离轨过程的稳定[22]。Sabey等提出了一种电流反馈控制律,在轨道机动过程中通过调节电流来影响轨道要素的设计[23]。
总之,控制器可以抑制EDT离轨系统的振动以提高电动力利用效率,从而缩短离轨时间。
3 电动力系绳离轨时间预测
离轨时间是指飞行器凭借EDT离轨系统从原来轨道高度下降到设定高度所需的时间,是离轨方式的一项重要评价指标。离轨时间计算的准确度主要取决于地磁场模型、EDT动力学模型、飞行器轨道运动学模型、子星动力学模型和轨道摄动模型等。
已有一些文献对EDT离轨时间进行深入研究。例如:
Forward等采用哑铃模型近似预估系统离轨时间 Δt[24],得到

式中:Ms为系统总质量;R为EDT总电阻;L为系绳长度;BE为地球磁感应强度;RE为地球半径;α为系绳偏离角;λ为基星轨道倾角;a是轨道半长轴,ainitial和afinal分别为离轨起始和终止时间对应的轨道半长轴。
娄宗勇研究了轨道参数变化和空间环境干扰对卫星离轨时间的影响[25],得到
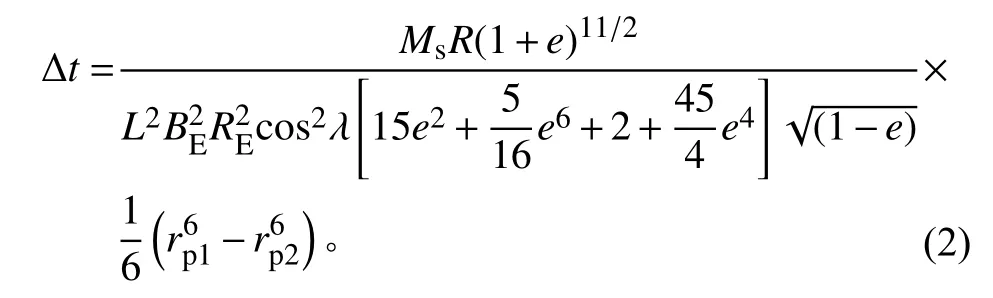
式中:e为轨道偏心率;rp1和rp2分别为轨道1和轨道2的半径。
徐大富等在此基础上对EDT离轨时间进行分析,结果表明:离轨时间与地磁场模型的精确度有关[26]。胡长伟等研究了EDT与等离子体之间的接触电阻对EDT离轨特性的影响[27]。文献[28]通过高斯摄动方程推导出EDT纳卫星离轨的轨道摄动模型,分析了系绳系统的姿态稳定性,提出两阶段最优控制策略以满足多个轨道摄动,缩短离轨时间。张烽等分析不同系绳系统参数下EDT的离轨性能,得出结论:末端体质量对离轨性能影响较小;系绳越长,离轨时间越短;系绳的电流越大,离轨时间越短;轨道倾角越大,离轨时间越长[29]。
离轨时间的预测有利于我们合理、科学地安排任务,以最短的时间、最高的效率完成任务。
4 电动力系绳离轨装置设计
目前,已有一些机构进行了EDT离轨的在轨试验。然而离轨装置要成为未来航天器的标准配备部件,则必须是低成本、高效率的。Hoyt和Forward于 1994 年创立了美国 Tether Unlimited Inc.(TUI)公司,开发了“终止系绳系统”,用于从低地球轨道离轨废弃航天器[24]。EDT离轨装置主要由导电系绳、展开机构、等离子接触器以及系绳控制部分组成[30],如图2所示。
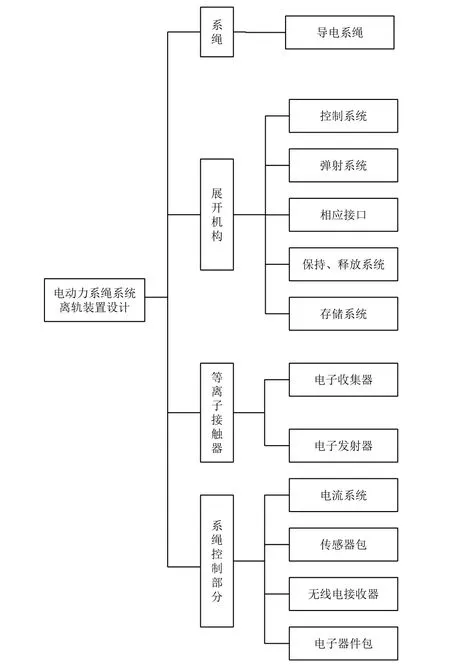
图2 EDT 离轨装置组成Fig. 2 Block diagram of the EDT deorbiting device
EDT离轨过程要求系绳能在恶劣的空间环境中正常工作。梳理以前一些系绳试验(TSS-1、TSS-1R、ATEx等)失败的原因,大多归结为系绳断裂或控制机构故障,可见选择系绳材料尤为关键。目前,用于空间试验制造系绳常见的材料有Kevlar、Spectra、Dyneema、铜和铝,前 3种为强度材料,后2种为导电材料。系绳材料特性参数见表2[31]。EDT早期试验选择铜,后来选择铝作为导电材料。这是因为二者的导电、导热性差不多,但铝的质量小、强度大。系绳结构有单股圆柱状、双股、网状(如Hoytether)和带状等。不同结构和尺寸的系绳在空间中的生存能力也不同,研究表明双股和带状系绳的生存能力明显优于单股的[32]。美国TUI公司对系绳生存性和EDT离轨的关键技术进行研究,通过试验统计获得了系绳动力学特性和生存寿命的数据[33]。

表2 系绳材料特性参数Table 2 Parameters of materials for tether
离轨系统中的展开机构用于保证系绳安全、快速地展开到指定位置,并保护系绳及机构免受空间碎片撞击。设计时要求其体积、质量和复杂度都尽量最小。
等离子接触器用于导电系绳与大气层等离子体进行自由电子交换,包含电子收集器和电子发射器。常见的电子收集装置有裸电动力系绳和收集球;电子发射装置有Spindt场致发射器和电子枪;空腔阴极同时具备场致发射和热发射2种功能[34-35]。电子收集/发射装置作为EDT离轨试验的关键部件之一,其收/发效率取决于许多因素,如导体的尺寸、形状,EDT系统自身和周围环境间的电势差以及轨道参数等。研究者依据上述因素研发了多种EDT电子收/发技术,可根据装置收/发电子过程中系统储能是否消耗分为主动和被动2类。主动技术需要消耗系统自身的储能,常见的有空心阴极技术、热电子阴极和电子场发射阵列;被动技术不需要电源,常见的有裸系绳收/发技术和终端收集技术。Sanmartin等回顾EDT在空间的应用后认为,裸电动力系绳离轨系统是最有前途的一种离轨技术[36],可以替代体积较大的球形等离子接触器。Forward和Sanmartín等研究了影响裸电动力系绳收集电子效率的参数[37-38]。苏杭等研究了系绳系统相关参数,结果表明:短系绳可用来做阳极;长系绳则会在绳的某部位出现电流饱和,而电流是否饱和与系绳系统参数有关[39]。利用裸系绳作为收集电子的阳极,只需配备电子发射器,可使系绳系统的质心偏移量和大气阻力均变小,同时可节约成本。此外,系绳系统具备自动调节能力,因此阳极系绳的长度可根据电离层电子密度自动决定。如何设计合适的EDT离轨装置由具体的空间任务决定。
EDT控制部分的功能是实时跟踪监视航天器运行情况,在一定条件下开启展开机构,优化释放系绳速率以及响应地面信号,及时实施相应的策略。
5 展望
本文简要总结过去几十年EDT离轨技术的研究进展认为,此技术要应用到实际中还需在以下几方面继续深入研究:
1)EDT的离轨效率与系绳电流有关,而等离子接触器从开放的电离层收集电子一直是很大的挑战,因此,要提高EDT的离轨效率应进一步研究提高等离子接触器电子收集效率的方法。
2)离轨系统硬件设备及技术有待继续提高——试验成本高、系绳系统尺寸大,给试验测量带来困难,导致试验数据较少;且已有在轨试验失败的原因大多是设备可靠性低。
3)目前,EDT离轨技术虽然有可能成为减缓空间碎片的有效方法,但真正应用到工程中还需考虑系绳生存性、尺寸优化和系统与航天器的质量比(特别是针对纳卫星和微小卫星的离轨)。
4)从技术长期应用角度看,EDT本身对空间环境的影响也应成为今后研究的重点之一。
猜你喜欢
国际太空(2022年7期)2022-08-16
北京航空航天大学学报(2022年7期)2022-08-06
都市人(2022年3期)2022-04-27
建材发展导向(2022年3期)2022-04-19
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19
国际太空(2021年8期)2021-11-05
天天爱科学(2020年6期)2020-09-10
环球时报(2019-12-05)2019-12-05