基于PLC的农机行驶路线控制研究与实现
2020-10-17 01:04:42刘廷敏向模军
农机化研究 2020年10期
刘廷敏,向模军
(成都农业科技职业学院,成都 611130)
0 引言
随着我国农业的发展,农耕土地逐渐进行集中管理,土地面积大,但由于机械化水平较低,大部分地区的农田播种、施肥、收割等劳动仍然采用人工,工作效率低,工作量大,不能按时完成农田工作,降低了农作物产量,急需提高农田机械化和智能化水平[1-2]。在农田内进行机械化和智能化生产时,对农机的行驶路线进行控制是必不可少的要求。为此,本文对农机的行驶路线的控制技术进行研究。
机械导航技术是结合了信息技术、定位系统等技术的自动化技术[3],可降低农田耕种的人力成本,大幅度提高产能。目前,国内的农机导航技术一般采用GPS导航[4],但定位误差和路线导航误差均较大,因此采用无线传感网络和GPS技术结合的方法进行农机行驶路线的自动定位和导航,可提高行驶路线的精度,并采用电机和PID控制方法实现对农机速度和转向的控制。
可编程控制器(PLC)是结合了PLC技术和各终端设备的一种控制系统,具有高可靠性、运行稳定和定位准确的优点,常用于机械控制系统,可通过配置设备对机器的工作状态和数据进行监控,还可通过中心服务软件的设置完成对终端设备的控制。本文将利用机械导航技术的优点,结合PLC技术在工业领域抗干扰性的优势,给出对农机行驶路线的控制方案,并进行系统设计。
1 硬件设计
1.1 总体路线
农机路径控制系统的整体规划流程图如图1所示。系统的主要由路径规划模块、运动控制模块及PLC控制模块等部件组成。
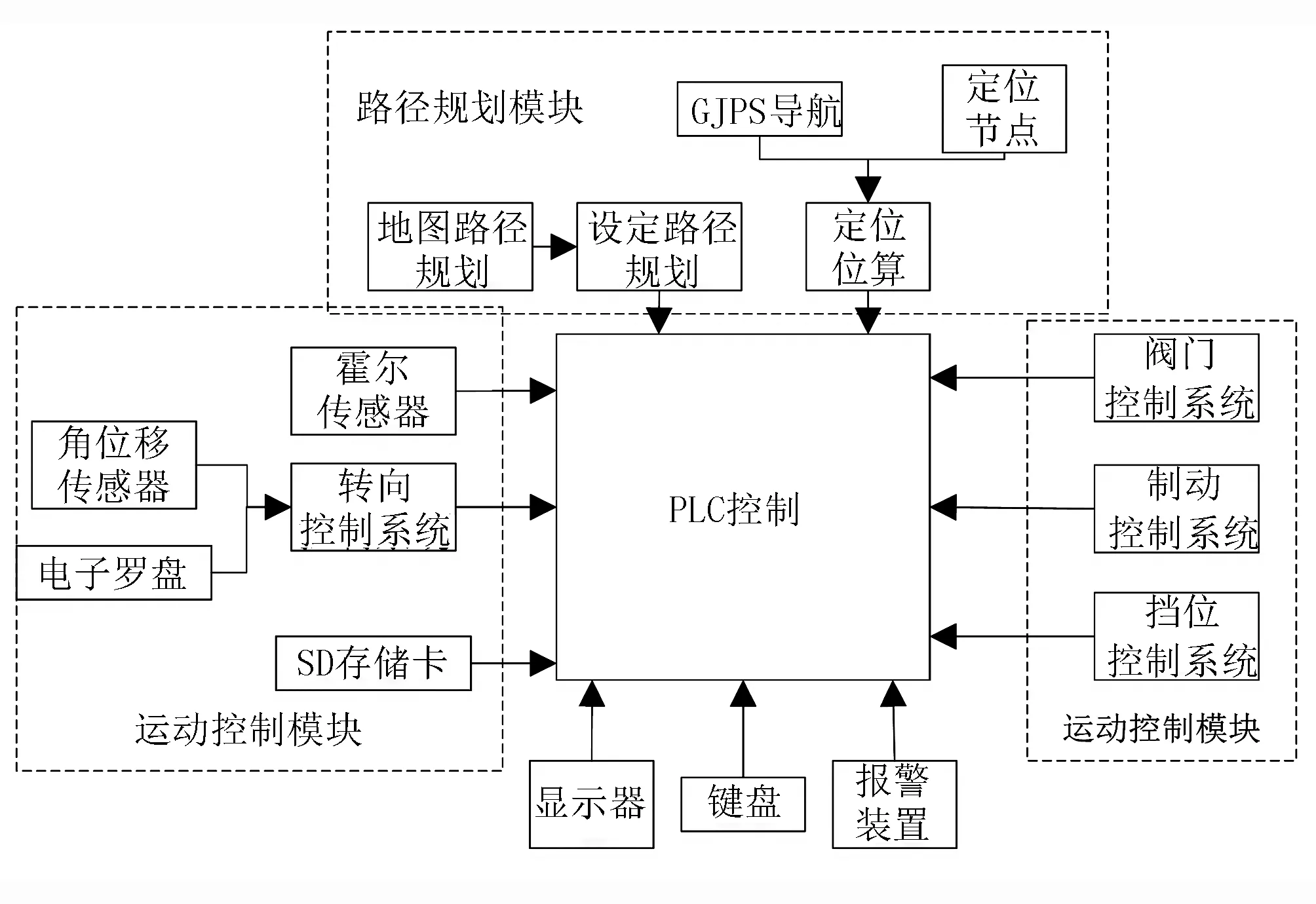
图1 农机路径控制系统整体规划流程图
1.2 PLC控制模块
PLC控制模块是农机行驶路线控制系统的核心部件,配备了较多的芯片,用于对农机进行路径规划、跟踪控制和计算。工作时,PLC控制系统将接收路径规划模块传递的农机路径信息及运动控制模块传递的农机行驶信息结合起来进行处理,并把分析结果以指令方式传递给运动控制模块,控制农机的行驶路径。PLC控制模块还可以实现系统的组网和扩展功能。
该路径控制系统还配置了显示器,用于显示农机的当前位置信息和前进速度,键盘用于控制系统的参数录入及控制农机的启动和停止,报警装置用于在农机出现异常情况时报警。以上组件均与PLC控制模块进行连接。
1.3 路径规划模块
路径规划模块的作用是:①对农机自动定位,使其按照预定的路线行驶;②当农机的行驶路线偏离预定路线时,调整前向转角自动纠正行驶路线。本文通过GPS导航和无线传感网对节点进行定位和导航,以提高定位和行驶精度。节点的定位方法如下:在农机上安装1个移动节点,农耕区域的节点数量和位置则根据需要进行布置,根据已知的节点位置,可以求解农机上的移动节点的位置坐标。假设已知节点A、B、C的坐标分别为(x1,y1),(x2,y2),(x3,y3),未知节点M的坐标为(xm,ym),节点A和节点B之间的距离为d0,根据RSSI测距原理可以将信号的强弱转换成距离的计算,则A节点接收到的M节点的信号强度为R(d)[5]为
其中,d为节点A和节点M的距离;μ为接收到的信号的衰减指数。结合已知的3个节点,即可求得μ。未知节点M到A、B、C等3个节点的距离分别为d1、d2、d3,通过以下关系式可计算得M点的坐标,即
但是,上式只适用于A、B、C为圆心、通过M点的3个圆相交,也就是可以采用三边测量的方式进行计算。在实际情况中,三圆相交的情况很少,可以将上述情况转化为两圆相交,也就是采用两边测量的方式进行计算。因此,只取A、B两点即可求得M点的坐标。
1.4 运动控制模块
运动控制模块主要由油门控制系统、制动控制系统、挡位控制系统和转向控制系统构成,用于控制农机行驶过程的速度和方向。其主要任务是接收PLC控制模块发出的路线控制指令,进行速度和方向的调节,一旦农机的行驶偏离预设路线,则改变农机行进方向,使其回到预设的行驶路线上。
2 路径规划设计
2.1 路径规划
在农机工作前,需要对农机的工作路径进行规划[6],使其按照预定的路径行进,本文采用定步长连续寻点的方法规划路径。该方法是通过设定节点坐标为目标点,农机按照预定的速度和方向行进至该目标点后,继续向下一个目标点行进,直至工作路径结束。假设农场为a×b的长方形,则农场内的节点设置和路径规划可以根据路径需要按照图2进行规划。在控制系统输入农田的尺寸和农机作业的有效宽度,则该控制系统即可实施自动作业。

图2 农场内节点设置和路径规划示例
2.2 农机转向控制
农机转向的控制主要包括两方面:①在农田的尽头实现自动转弯的控制;②当农机偏离预设路径时,控制转向使农机回到预设路径。PID控制方法简单有效、可靠性强,无需得到精确的农机控制机构的模型,仅靠调节增益即可进行控制,因此选择PID控制方法对农机转向进行控制。
计算农机行驶路径方向的偏差e(t),即
e(t)=A(t)-B(t)
其中,A(t)为目标方向,B(t)为实际行驶方向。通过比例、积分和微分的计算,并线性组合得到最终的控制结果。PID控制器的控制规律[7]为
其中,Kp为控制器的比例系数;Ti为控制器的积分时间常数;TM为控制器的微分时间常数[8]。此时,PID控制规律为连续值,需要对其进行离散化处理才能应用于计算机。离散化处理后的第n个时刻的PID输出值为
其中,T为控制器的采样周期。农机转向的PID控制原理如图3所示。
2.3 农机行驶速度控制
对于农机速度的控制,主要包括以下4种情况:①农机正常工作呈直线行驶时,速度恒定;②农田尽头转弯时,速度适当减小;③农机以曲线行驶时,速度随曲线弧度适当的改变;④停止作业时,速度减小为0。农机的速度控制也采用PID控制器进行控制,原理图如图4所示。

图4 农机速度的PID控制原理图
农机作业前,在系统设置目标转速,作业时由霍尔传感器测得实际转速,通过系统的计算即可得到速度的偏差|E|和速度偏差的变化率|EC|。这两个值作为PID控制器的输入变量,输出变量为控制器比例系数Kp、积分时间常数Ti和微分时间常数TM。当输入值|E|和|EC|变化时,输出变量Kp、Ti和TM将在PID控制器的作用下实时调整,直到得到输出值的最优解,此时输出控制量μ(t)。最后,由PLC控制器将速度调整指令发送给运动控制模块,实现速度的自动调整。
3 试验结果
为验证农机行驶路线控制系统的性能,对该系统的自动导航、定位和速度控制方面进行测试。测试对象为拖拉机。为避免地势的影响,选取试验场地为80m×80m的平整土地,设置25个位置坐标已知的节点,且这些节点能够覆盖整个试验场地。农机运动方向与X轴夹角为45°,在土地的尽头转弯,然后继续直线行驶,速度设定为1m/s。
3.1 自动导航测试
节点位置的设置和规划的路径及拖拉机在该系统作用下的作业路径,如图5所示。由图5可以看出:拖拉机的实际路径与规划的路径偏差很小,基本吻合,因此该行驶路线控制可以实现自动导航的目的。

图5 拖拉机测试路径和节点设置结果
3.2 定位与速度控制测试
在拖拉机行驶路径抽取10个点测试其理论坐标值、实际坐标值及经过该点拖拉机的行驶速度。为了对定位的误差进行评估,定义误差值为
其中,(xk,yk)为第k个点的坐标。
测试结果如表1所示。

表1 定位与速度控制测试结果
由表1可知:测试点的误差值均小于0.23,平均误差为0.18,速度误差均小于0.01m/s,平均行驶速度为9.9m/s。该系统算法可以完成对拖拉机的定位和速度的控制。
4 结论
1)针对农机行驶路线控制系统进行了设计,系统的主要由路径规划模块、运动控制模块和PLC控制模块等部件组成。
2)行驶路线控制系统采用定步长连续寻点的方法进行路径规划,采用PID控制算法对农机的行驶转向和速度进行计算并控制,保证了农机按照预设的速度和路线自动行驶,当偏离路线时能够及时回到预定路线行驶。
3)通过对系统进行自动导航、定位和速度控制进行测试,结果表明:系统可以实现农机的自动导航及按照预定的速度和路线行驶,工作性能稳定。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31 07:54:42
今日农业(2021年4期)2021-11-27 08:41:35
学生天地(2020年5期)2020-08-25 09:09:08
中国化肥信息(2019年5期)2019-06-25 00:52:30
电子测试(2018年10期)2018-06-26 05:53:36
汽车博览(2016年9期)2016-10-18 13:05:41
交通建设与管理(2015年15期)2015-03-20 15:19:15
散文百家(2014年11期)2014-08-21 07:16:42
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17