
基于嵌入式和图像处理技术的精准自动施药平台研究
2020-10-17 01:02黄凤辉
农机化研究 2020年5期
刘 英,黄凤辉
(1.内蒙古机电职业技术学院 信息与管理工程系,呼和浩特 010010;2.广东环境保护工程职业学院 实训中心,广东 佛山 528216)
0 引言
在防治农作物病虫草害的过程中,粗放式的人工施药会对环境和农产品食用者造成一定的伤害。精准施药技术是获取农作物病虫害发生的空间和时间信息,将施药过程和新型的定位技术、传感器、自动控制、图像识别与处理、变量喷头等结合起来,实现仅针对病虫草害的有效区域进行定点、定量施药、按需喷雾的方法。本文提出了一种基于嵌入式和图像处理技术的精准自动施药平台,采用图像处理技术,能够实现对杂草的精准施药。
1 精准自动施药平台
精准自动施药平台通过工业相机拍摄农作物生产状态的图像信息,然后通过图像采集卡发送给嵌入式控制系统进行处理;识别到杂草后,则发送控制参数命令给施药系统进行施药;施药系统会调节喷头到合适的位置,并调节阀门开度,开始施药作业。由于精准自动施药平台不具备行走装置,因此将其安装在农用拖拉机上,如图1所示。
采用国内博阳公司生产的BYTE-504农用拖拉机作为载体。精准自动施药平台容量为400L,配备意大利Annovi Reverberi公司生产的 AR530型空气加压泵,最高能够提供 40 bar (600 psi)压力。该泵可以分三路输出,喷嘴安装在3个不同高度的垂直桅杆上,用螺栓固定在拖拉机底盘上,如图2所示。

图1 搭载精准自动施药平台的农用拖拉机

图2 喷嘴安装示意图
为了减少农业拖拉机作业操作期间的桅杆振动,使用横杆作为支架,另一个垂直桅杆用于连接3个等距安置的工业相机,工业相机和喷嘴之间的距离为30cm。
2 基于图像处理技术的杂草识别定位技术
2.1 HSI颜色算法
HSI颜色算法以视觉为出发点,用色调、饱和度、亮度表示不同的色彩,其颜色模型可以用如图3所示的圆锥空间模型表示。RGB是空间颜色模型的独立单位的立方体,其颜色模型如图4所示。RGB 向HSI转换是从笛卡尔直角坐标向锥体坐标系的一种转换,具体做法是分离RGB 模型中的亮度色彩,将色度分别转换成色调和饱和度。

图3 HSI颜色模型
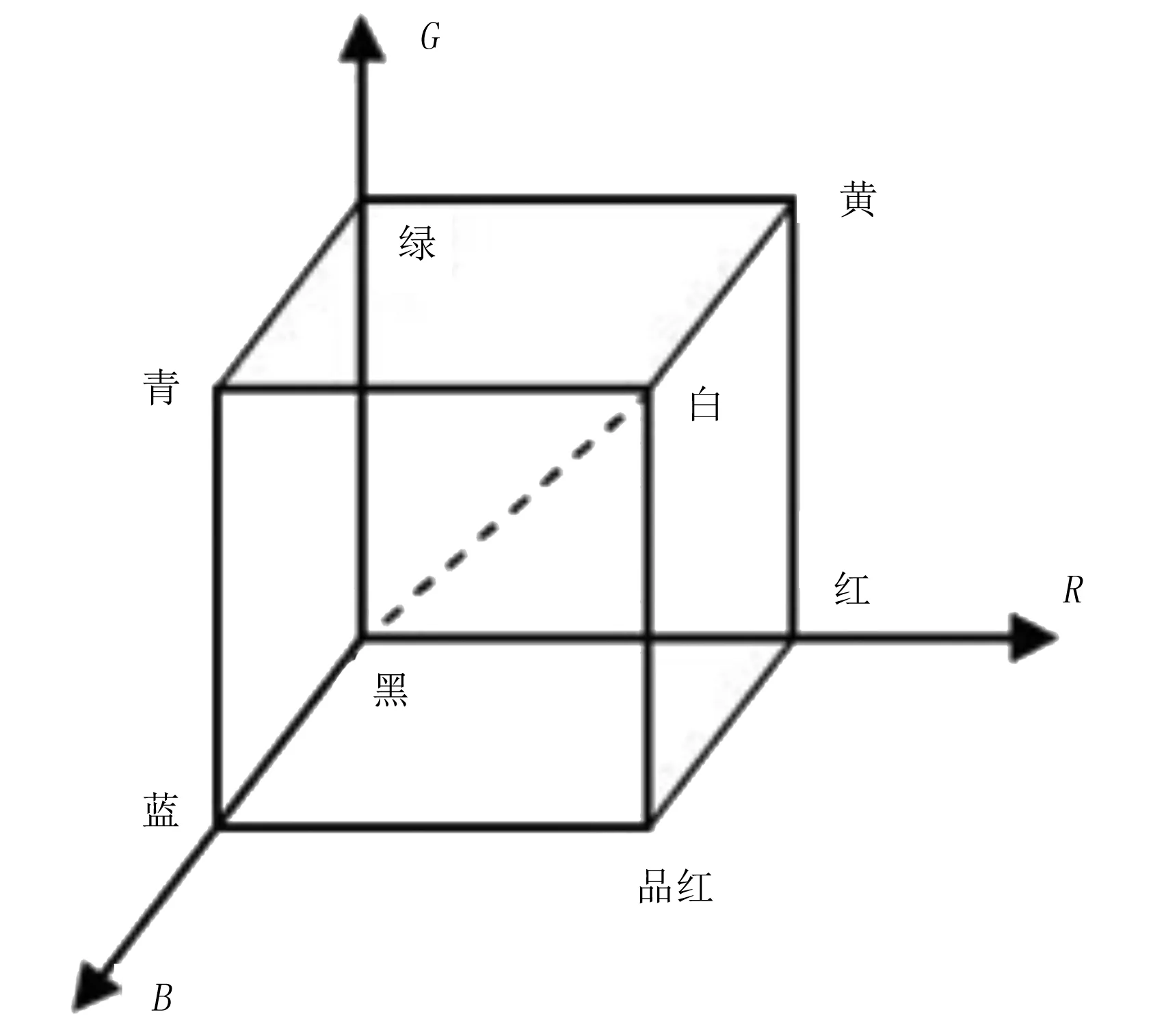
图4 RGB颜色模型
图3和图4中:H为颜色的色调值,S为颜色的饱和度值,I为颜色的明度值;R为红色,G为绿色,B为蓝色。分别对H、S和I进行计算,并利用面积加权直方图的方法,可以通过杂草和作物的颜色和纹理判断该区域是否由杂草的存在。
由于在HSI模型中,亮度和色度是分离的,其在颜色分割中应用较多,但很少有硬件能够直接支持该模型,往往需要从其他颜色模型转换。RGB和HSI两种颜色模型可以互相转换,转换算法有几何推导法、坐标变换法、分段定义法、Bajon近似算法和标准模型法5种,各个算法的效果侧重点不一样。本文采用嵌入式处理器为图像处理核心,由于其硬件资源和计算能力有限,为了使转换算法简单有效,采用标准模型算法。标准模型算法的计算表达式为
(1)
H=H+2π ifH<0
(2)
S=Max-Min
(3)
(4)
其中,Max=max(R,G,B),Min=Min(R,G,B)。
2.2 杂草识别与定位
杂草的识别就是精准自动施药平台工作区域的识别,杂草识别与定位图像处理系统的流程如图5所示。

图5 杂草识别与定位图像处理系统
精准自动施药平台需要在复杂的田间进行作业,工作环境复杂多变,在图像预处理中需要实时对图像的亮度和色彩进行校正和滤波。
为了去除一些图像噪声,减少对分析结果的影响,将图像转换为RGB图像,得到色度图像,即
今年5月22日,北京市政府召开了“全面提升首都餐饮业品质工作部署会议”。会上,副市长殷勇对“北京市深入推进阳光餐饮工程 全面提升首都餐饮业品质”做了部署动员,北京市餐饮业品质提升工作正式启动。
(5)
得到色度图像后,利用前一节的RGB-HSI转换算法,将其转换为HSI图像,然后经过绿色通道颜色提取、图像分割、目标识别等识别出杂草。在进行目标识别过程中,对图像进行二值化分析处理,即对图像区域进行填1和填0的操作,使得目标和背景分别为黑、白色。为了提高图像处理的质量,本文采用了直方图均衡化处理和中值滤波两种滤波算法。
直方图均衡化处理中的主要滤波函数为
(6)
其中,0≤rj≤1;k=0,1,2,3,…,l-1;l为灰度级的总数目;Pr(rj)为灰度第j级的概率;nj和n为灰度出现的次数和总数。
中值滤波的基本思想是使用模板在原始图像中滑动,对原始图像模板内的像素进行大小排序,取序列的中值作为图像该像素点处中值滤波的结果。中值滤波器计算公式为
yk=med(xk-n,xk-n+1,xk-n,…,xk,xk+n+1,xk+n)
(7)
假设原图像的灰度值如图6左侧所示,取3×3滑动窗口,从小到大对灰度值排序为98、100、101、102、105、106、107、108、112。中值为窗口内第5个最大的像素值,即105,处理后图像,如图6右侧所示。

图6 中值滤波处理过程
采用迭代阈值算法分离目标和背景,其主要流程为:

2)将图像分成目标和背景,并分别求出平均灰度值Z0和Zb,即
(8)
其中,Z(i,j)和N(i,j)为图像上(i,j)的灰度值和权重系数。
3)计算新的阈值,即
(9)
通过重复计算第2)和第3)步,直至分离出目标和背景,然后由嵌入式控制系统去作用于喷头阀门。
3 精准自动施药平台控制系统
3.1 控制系统硬件设计
精准自动施药平台主要由工业相机、嵌入式控制系统、图像采集卡及施药系统等组成,如图7所示。

图7 精准自动施药平台控制系统框架图
1)嵌入式处理器。嵌入式微处理器模块任务是管理与控制图像转换及目标识别,实现对喷头阀门的准确控制。为保证系统高速运行,采用了STM32 L4 系列 Cortex-M4 超低功耗微控制器。STM32L4 MCU在超低功耗微控制器效率的标准化 EEMBC ULPBench测试中获得 253 分,打破了当前超低功耗领域的性能极限,在超低功耗模式下开启内部实时时钟,电流仅450nA。性能方面采用了带 FPU 的 ARM Cortex-M4 内核以及意法半导体 ART Accelerator技术,能够 80 MHz CPU 频率下达到100DMIPS 的运算速率。该系列产品是目前性能与功耗结合最佳的微控制器,适用于运行性能要求高、连接时间长的兼顾节能与高性能的控制终端设计。
2)电机驱动电路。本文需要对喷头阀门进行驱动控制,选择使用DRV8303三相栅极驱动器,可通过6~60V输入电压运行,支持最大设置为 2.3A 灌电流/1.7A 拉电流的可编程栅极电流,可以使用可配置的阈值进行硬件逐周期过流限制,从而实现电机停止保护。另外,该电路对每个相位提供单独相位电压、直流总线电压、直流总线电流感应和低侧电流感应的感应反馈,实现无传感器控制。电机驱动电路实物图如图8所示。
3.2 控制系统软件设计
精准自动施药平台控制系统软件流程,如图9所示。该系统中,会预先设置好喷头喷药的PWM流量库,当识别到杂草时,会发送识别结果和喷雾量参数给控制器;接收到相应的动作指令后,执行PWM流量库相应的电机控制函数,从而达到控制喷头阀门开启的目的。
4 试验测试与结果分析
为了验证基于嵌入式和图像处理技术的精准自动施药平台的可行性和准确性,在某橙子果园种植区进行了实际的喷药试验。橙子果园种植区行间距为4m,垄长为100m,不碰撞到果树的安全距离为1m。试验中,对连续5垄地进行喷药试验,并对每次喷药点是否有杂草进行记录,结果如表1所示。

表1 喷药试验误差统计结果
从表1可以看出:精准自动施药平台准确率达到了91.5%以上,说明该平台具有很高的喷药精度和稳定性,能够满足对果园除草喷药的要求。
5 结论
基于嵌入式和图像处理技术,设计了一套精准自动施药平台。精准自动施药平台利用搭载的工业相机获取杂草图像,通过图像处理技术和HSI颜色算法,实现了对杂草的识别和定位,并利用嵌入式控制器对喷头阀门进行控制,实现对目标杂草喷施农药。测试结果表明:精准自动施药平台准确率达到了91.5%以上,说明该平台具有很高的喷药精度和稳定性,能够满足对果园除草喷药的要求。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
电子测试(2018年23期)2018-12-29
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
电气化铁道(2016年4期)2016-04-16
单片机与嵌入式系统应用(2014年9期)2014-03-11
自动化博览(2014年4期)2014-02-28
