
排球运动规划在采摘机器人识别与定位中的应用
2020-10-17 01:02:20王刚
农机化研究 2020年5期
王 刚
(河南艺术职业学院 公共教学部,郑州 450002)
0 引言
在排球比赛过程中,为了找到最佳的扣球动作,采用排球机器人进行训练是一种可行的方法,通过该方法可以找到合适位置出手点、角度和力度等优化数据。排球机器人主要由两部分构成,包括规划模块和执行模块。其中,规划模块根据球的运动状态及扣球策略确定扣球动作,并完成机械臂的轨迹规划;执行模块则按照规划模块生成的机械臂运动轨迹,执行扣球动作。为了提高机器人的智能化程度,引入了人工智能算法。人工神经网络是一种智能化的训练算法,可以实现低误差的自动反馈调节,将其使用在排球训练策略上,可以使排球机器人更加迅速地对情景做出反应,从而提高排球运动规划的决策水平。排球机器人的设计方案完全适合采摘机器人的设计,特别是动作规划系统可以完全移植到采摘机器人的定位识别系统中,对于提高采摘机器人自主定位和识别能力具有重要的意义。
1 排球机器人动作自主规划与训练策略
在排球比赛过程中,扣球和拦网是主要的得分要素,特别是扣球的质量,在比赛的关键时间可以决定比赛的胜负。扣球动作规划要求排球运动员具有较高的反应能力,能在较短时间内合理规划好扣球动作,使排球即越过球网又能成功拿到分数。为了达到这个目的,需要运动员平时不断地对动作进行训练,才能在比赛较短时间内扣球出手时得到合适的角度。为了找到合适的扣球方法,可以采用排球机器人进行训练,以找到合适位置出手点、角度和力度等优化数据。排球机器人正常扣球时的角度如图1所示。

图1 排球扣球正确动作规划
排球机器人将排球扣球动作正确规划后排球可以顺利越过球网,并根据规划的动作落到指定位置,如果动作规划不正确,排球很容易没有过网而失掉分数,如图2所示。
排球机器人动作规划错误会造成没有过网或者出界等错误,为了使排球机器人具有较高的扣球得分率,还需要对排球机器人进行不断的智能化训练,如利用神经网络智能化算法。整个排球机器人的设计主要包括4部分,其总体框架如图3所示。
图2 排球扣球错误动作规划
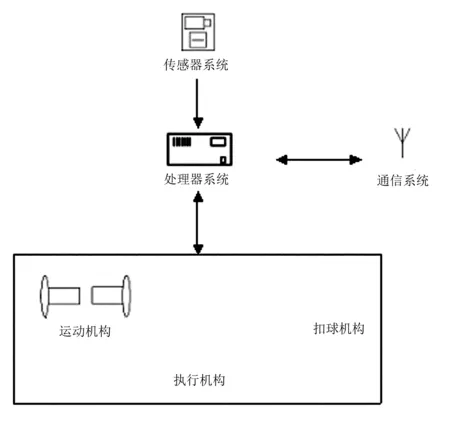
图3 排球动作规划机器人总体框架
排球动作自主规划机器人平台包括处理器系统、传感器系统、执行机构和通信系统,利用传感器可以对扣球的一些动作信息进行采集,然后反馈到处理器,以对扣球动作进行相应的调整。扣球动作的主要完成机构是执行机构模块,且排球机器人还具有通信系统,可以将动作信息传递给远程端,还可以通过远程控制的方式对机器人进行动作指挥或者应急控制。
2 排球机器人动作规划在采摘机器人定位系统中的应用
排球机器人可以通过传感器系统和信息系统对动作规划进行不断调整,最后实现最佳的扣球动作。排球机器人和采摘机器人控制系统的工作原理类似,采摘机器人要想达到合理的采摘精度,需要对果实进行高精度的定位,高精度的定位系统离不开采摘信息反馈系统和动作规划系统,因此可以将排球机器人的设计框架移植到采摘机器人的设计上,并采用智能化算法对其动作进行不断地训练。其主要流程如图4所示。

图4 采摘机器人设计流程
为了提高采摘机器人的定位和识别精度,还需要利用高效的智能化算法对其动作规划进行不断的训练。人工神经网络算法是目前常用的一种智能化优化算法,其主要模拟人的神经网络工作过程,利用电路或者控制程度来实现智能优化过程。人工神经网络模型如图5所示。

图5 人工神经网络模型
与人类神经元工作模式类似,人工神经网络可以对输入的数据进行处理,然后得到合理的决策数据后输出。在采摘机器人进行定位时,可以假设待采摘果实为凸多边形,其数学表达式为
(1)
其中,果实的边数可以用m表示;p1,p2,…,pR为输入的训练数据;ω1,ω2,…,ωR表示连接权值;θ表示偏置信值,果实的(x,y)点都在不等式约束的范围之内。
假设直线上有确定的两点p1(x1,y2)和p2(x1,y2),则权值和置信值可以分别表示为
(2)
受到风力和采摘环境的影响,待采摘果实往往会发生一些移动,假设待采摘果实做平移动作,各个参数都可以进一步简化,其中各个边的ωx、ωy不变,于是可得θM的更新公式为
ΔθM=-ωxpx-ωypy
(3)
其中,px、py分别是平移向量p在x轴、y轴上的投影分量。假设椭圆的两个端点分别是A1(x1,y2)和A2(x1,y2),其2a长轴可表示为
(4)
长轴与x轴正方向的夹角θ0为
(5)
椭圆的中心C(x0,y0)为
(6)
假设短轴的一个端点为B1(x3,y3),则短轴的长度2b为
(7)
有了a、b、θ0这些参数,就可以对神经网络参数进行更新,其神经网络的第一层的偏置值按下面的公式更新,即
(8)
(9)
如果活动的障碍物为其他形状,还可以根据需要进一步拓展模型。采用神经网络模型,可以按照一定的规则通过样本数据进行不断的训练,得到合理的识别和定位决策,如图6所示。
采摘机器人在智能化训练过程中,可以通过神经网络的样本训练,利用数据分析和训练动作的不断优化,形成精度较高的采摘动作规划方法,最后通过不断的分析比较,形成思维决策能力。
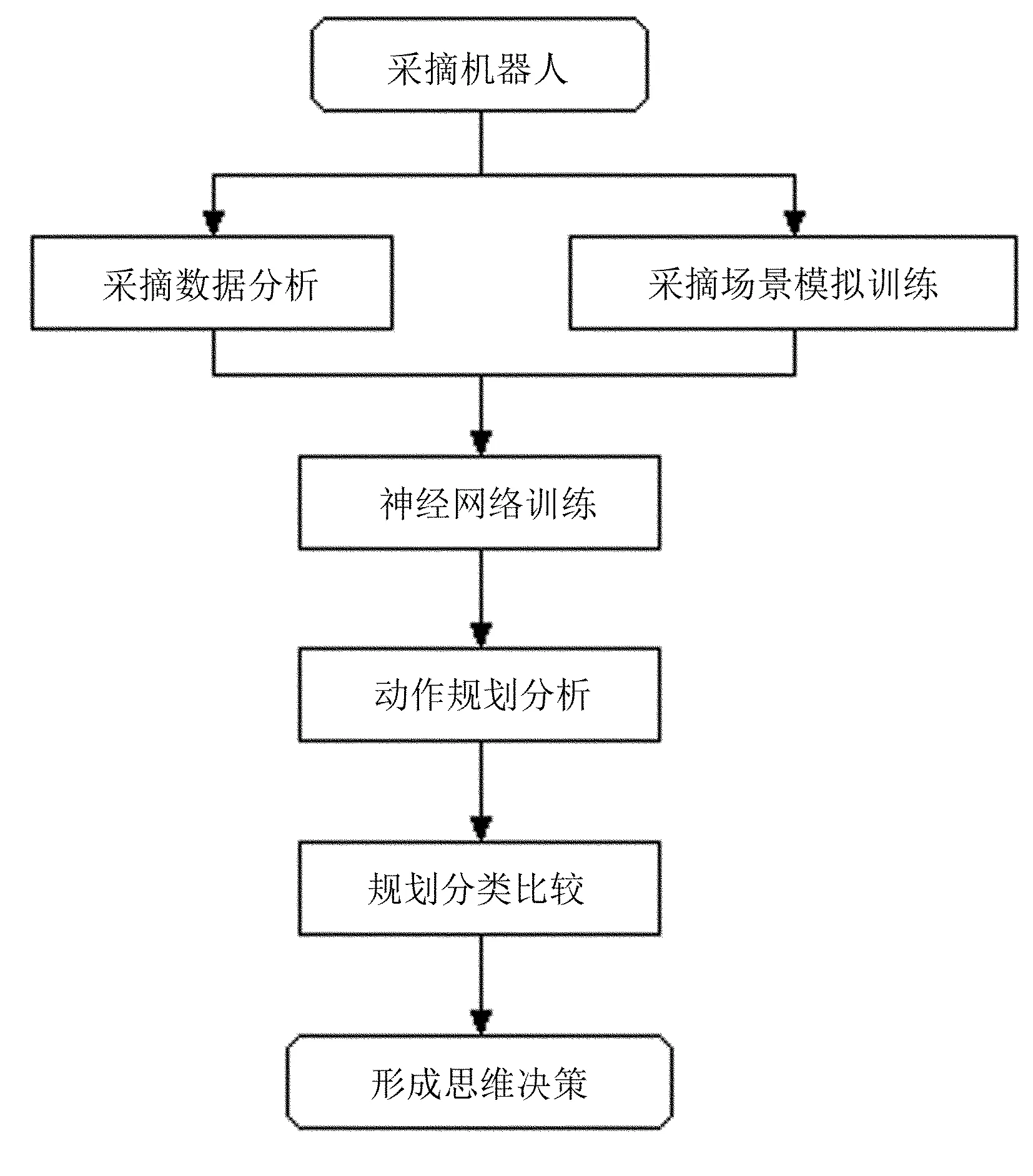
图6 采摘机器人智能训练过程
3 采摘机器人定位识别功能测试
根据排球机器人运动规划系统的原理,将人工神经网络算法嵌入到了采摘机器人的软件模块中,以实现机器人的快速和高精度的定位识别功能。其软件系统的基本结构框架如图7所示。

图7 采摘机器人软件结构框架
采摘机器人的主控计算机软件模块主要分为4部分,包括视觉处理模块、路径规划计算模块、机器人主控制模块和通信模块。其中,视觉模块主要功能是对待采摘果实的识别;路径规划模块通过人工神经网络算法得到最佳的果实定位识别路径,为采摘机器人的动作行为提供运动策略。软件模块采用Windows平台,图像处理模块采用DirectX+OpenCV 开发, 通信模块采用DSP芯片进行控制,从而实现采摘机器人的智能化定位过程。待采摘苹果如图8所示。

图8 待采摘苹果示意图
为了验证方案的可行性,以采摘苹果作为试验目的,通过软件智能控制采摘机器人的方式对苹果的识别和定位成功率进行测试,以验证人工神经网络算法的可靠性。测试过程中,分别对人工神经网络、蚁群算法、禁忌搜索算法和贝叶斯算法进行了数据统计,统计结果包括算法的响应时间和响应完成,如表1所示。
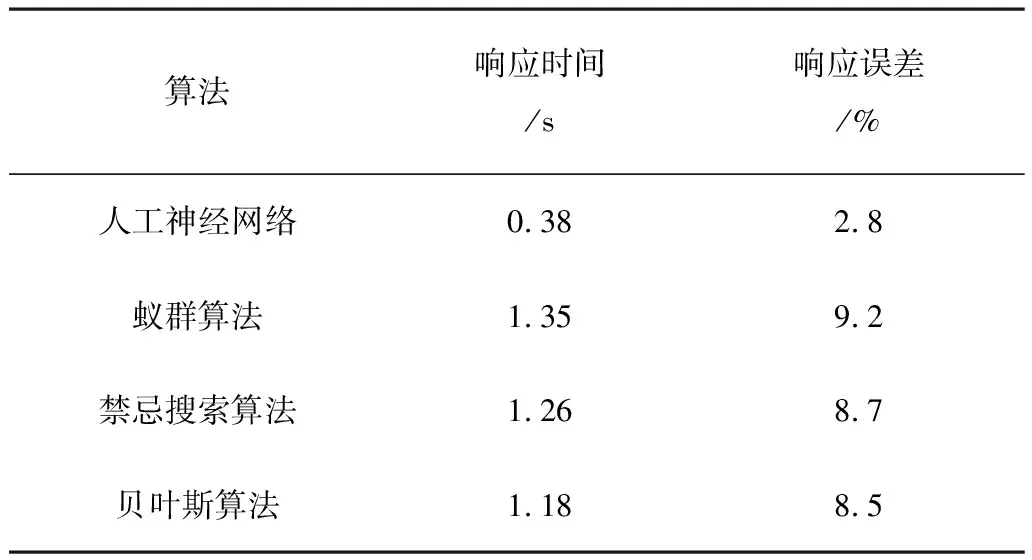
表1 决策响应时间和响应误差表
由表 1可以看出:采用人工神经网络算法响应时间最短,响应误差也最小,是最佳可选的智能算法。

表2 定位时间和采摘成功率统计结果
由表2可以看出:采用4种智能算法的果实成功采摘率都较高,人工神经网络算法是最高的,且定位时间也是最短的,将其使用在采摘机器人定位识别系统中是可行的。
4 结论
为了提高采摘机器人的自主定位和识别能力及采摘效率和准确率,将排球机器人运动规划方案使用在了采摘机器人控制系统的设计上,并对机器人采摘的效率和成功率进行了测试,以验证方案的可行性。测试结果表明:对于苹果的成功采摘率较高,且定位时间也较短,系统的响应误差较小,响应速度较快,可以满足果实快速高精度采摘的设计需求。对不同的人工智能算法分别进行了测试,其中4种智能算法的成功采摘率都较高,人工神经网络的精度是最高的,也是响应最快的。因此,人工智能算法的使用对于提高采摘机器人的智能化和自动化水平具有重要的意义。
猜你喜欢
学校教育研究(2022年2期)2022-03-22 05:19:18
空间科学学报(2020年4期)2020-04-22 01:17:12
武术研究(2020年2期)2020-04-21 10:34:10
甘肃教育(2020年22期)2020-04-13 08:11:10
名师在线(2019年6期)2019-11-26 12:33:03
电子制作(2019年10期)2019-06-17 11:45:10
经济技术协作信息(2018年28期)2018-11-22 05:26:26
运动(2016年6期)2016-12-01 06:33:59
运动(2016年11期)2016-07-22 05:17:32
当代教育理论与实践(2015年9期)2015-12-16 16:26:06
