
基于灰狼优化PID控制的变量喷药系统研究
2020-10-17 01:02:08王新东徐艳蕾孟笑天
农机化研究 2020年5期
王新东,徐艳蕾,2,张 奇,孟笑天,何 润
(1.吉林农业大学 信息技术学院,长春 130118;2.吉林大学 工程仿生教育部重点实验室,长春 130022)
0 引言
变量喷药技术是根据田间信息(包含土壤、气候、作物生长情况等),利用先进的智能化农业机具自动调节喷药量,它源于精确农业思想,是精确农业中非常重要的一项研究内容[1]。变量喷药技术不仅提高了喷药性能,而且减少了农药残留对生态环境造成的负面影响 ,因而对现代农业发展有着重大的推动意义。
变量喷药技术的核心是根据农田环境的变化实时调整喷药量,目前常用的变量喷药技术主要是压力式[2-3]和PWM式[4-5]:压力式控制系统由于压力的频繁变动,喷雾效果会减低;PWM式对系统的频率要求较为苛刻,过高会影响电磁阀寿命,降低系统响应速度,过低则降低喷药性能。PID控制式是根据传感器返回的实际流量和目标喷药量得出喷药量差值作为输入量,通过比例、积分、微分环节计算处理后控制电动比例阀的阀门开度,从而实现变量喷药控制。但是,传统的PID 控制式经验性强,参数整定复杂,且系统易出现稳定性不足、控制精度低等缺点。灰狼优化算法(Grey Wolf Optimizor, GWO) 是一种新型启发式算法[6],源于对灰狼群体追踪、围捕、攻击猎物捕食行为的模拟。GWO算法实现简单且具有较强的寻优性能,因此在各个领域都得到了广泛的应用。
为了解决传统PID控制方式的不足,本文设计了一种基于灰狼优化PID控制的变量喷药系统,以提高系统的控制精度和稳定性。
1 系统总体设计及模型构建
1.1 系统总体结构框图
本文设计的变量喷药系统主要由药箱、电动泵、流量传感器、液位传感器、微处理器、显示屏、摄像头、分配器和喷头组等部件组成,如图1所示。

图1 系统总体设计
1.2 工作原理
喷药作业前,在药箱中将农药和相关的溶剂混合均匀,待系统使用。采用液泵控制系统压力,当管路压力超过设定值时,管路中药液通过溢流阀回流到药箱中,从而保持系统压力恒定。摄像头获取农田信息后,根据专家决策获取所需喷药量,作为设定量值,传入微处理器;微处理器根据流量传感器反馈的实际流量值和设定值的差值以及差值的变化率进行模糊PID运算,最终输出控制电压调整电动阀门的开度,使得实际喷药量随着田间信息的变化而自动调节。
1.3 变量喷药系统模型
变量喷药系统结构框图如图2所示。本系统是以喷药量为控制量构成闭环控制,根据设定喷药量Q和系统的实际喷药量Q'得到偏差量△Q=Q-Q′,经PID计算[7]输出电压控制电动阀,调整阀门的开度大小,实现变量喷药。

图2 变量喷药系统结构框图
电动阀作为核心的执行部件可看作一阶惯性环节,其传递函数为

(1)
其中,K1为电动阀的增益(常数),T1为时间常数。喷头的传递函数为

(2)
其中,K2为增益常数,T2为延时系数(常数)。
PID控制器的传递函数为
(3)
其中,Kp、Ki、Kd为PID控制参数,Kp为比例系数,Ki为积分系数,Kd为微分系数。
反馈系统的传递函数为
H(S)=1
(4)
所以,变量喷药系统的传递函数为
(5)
2 硬件控制系统设计
控制系统设计主要包括核心控制器、信息采集与监测和执行机构等3部分,如图3所示。

图3 硬件系统结构图
2.1 核心控制器
本文选用STM32ZET6微处理器作为系统的核心控制器,它是一个基于ARM Cortex-M3内核的低功耗32位处理器,最高主频达到72MHz;内部含有256K可反复擦写的flash存储器、3个12位AD转换器、5个USART接口、16个外部中断及2路12位DA转换器,完全满足本系统的设计要求。
2.2 信息采集与监测
本文采用工业级摄像头采集农田信息,内嵌快速图像处理算法和专家决策系统,根据采集到的农田信息配合专家决策系统得出喷药量的设定值,经过RS232串口通信送入STM32微处理器。
监测部分主要是传感器的反馈。流量传感器测得系统的实际喷药量并反馈给STM32,进行下一步的PID计算。压力传感器实时监测系统的压力值,根据压力的变化调整溢流阀使系统维持在试验要求的恒定压力值。液位传感器实时监测药箱的药量是否充足,一旦低于所需药量立即触发报警电路。系统的压力、流量和液位信息实时显示在电容触摸屏上,方便工作人员的管理。
2.3 执行机构
本文选择PM-02型微型电动阀作为变量喷药控制系统的执行部件。该电动阀由24V直流电源供电,输入信号为0~10V或4~20mA模拟信号。由于STM32的IO只能输出0~3.3V的模拟信号量,不满足电动阀的输入信号范围,因此选用磁隔离放大器ISOEM-U5-P3-O5将0~3.3V线性放大到0~10V。STM32的输出信号经放大器放大后控制电动阀调节阀门的开度,实现变量喷药作业。
3 灰狼优化PID控制与系统仿真
3.1 灰狼优化算法
灰狼优化算法(GWO)是一种模拟自然界中灰狼群体社会等级制度和捕食行为而衍生出的新型智能优化算法。灰狼群体拥有严格的社会等级制度, 可形象描述为金字塔等级制,如图4所示。灰狼群体按照等级高低依次分为α、β、δ、ω4个等级,高等级的狼领导低等级的狼。灰狼群体狩猎时, 主要进行包围、猎捕和攻击等行为,高效地完成对猎物的捕获。
在灰狼优化算法寻找最优解过程中,根据灰狼的适应度值和各阶层之间关系,使狼群接近猎物的位置,完成最优解的搜索。根据灰狼猎食的3个重要步骤,即包围、猎捕和攻击,GWO算法建立数学模型:狼群中每个灰狼代表了种群的一个潜在解。其中,α狼位置是最优解,β和δ位置分别为优解和次优解,ω的位置为其他候选解。
灰狼优化算法随机初始化灰狼群,每个灰狼通过位置X描述。群体通过迭代过程找到最优解,在迭代过程中,通过计算个体的适应度值,确定最优解、优解和次优解,即得到α、β和δ的位置,则有
D=|CXp(t)-X(t)|
(6)
X(t+1)=Xp(t)-AD
(7)
A=2ar1-a
(8)
C=2r2
(9)
式中Xp(t)—第t代时猎物的位置向量;
X(t)—第t代时灰狼个体的位置向量;
A、C—系数;
a—距离控制参数;
r1、r2—[0,1]之间的随机数。
灰狼种群中剩余的狼ω的位置更新由适应度值最高的α、β和δ狼共同决定,即
(10)
(11)
X(t+1)=(X1+X2+X3)/3
(12)
距离控制参数a的设置平衡了灰狼个体的全局搜索能力和局部搜索能力。通常情况下,控制参数a取值在[0,2]范围内,且随着算法迭代次数增大而线性递减。当a较大时,算法搜索步长较大,全局搜索能力较强,有利于跳出局部最优;当a较小时,局部搜索能力较强,在当前解的附近搜索,有利于算法收敛。对应式(8),当|A|>1时,狼群就会分散开追击猎物,扩大搜索范围,对应于算法的全局搜索;|A|≤1时,意味着狼群的下一个位置能够更加接近猎物,进行集中攻击,对应算法的局部搜索。
3.2 灰狼优化PID控制算法(GWO-PID)
PID控制算法是根据输入和输出的偏差值构成控制偏差量,经过比例积分微分运算输出控制量作用于执行机构。由于其具有原理简单且易于实现[8]等优点,因而在变量喷药领域得到广泛的应用[9-10]。
但是,传统的PID控制算法参数(Kp,Ki,Kd)整定复杂,且对于非线性系统适应性差,进而影响变量喷药系统的稳定性和控制精度。基于以上问题,将灰狼优化算法与PID控制结合,构建灰狼优化PID控制算法(GWO-PID),应用于变量喷药控制,对PID参数进行自适应调整,保证系统工作在较好状态下,达到满意的控制效果。GWO-PID算法的流程如图5所示。
3.3 系统仿真与结果分析
在灰狼优化PID算法寻优过程中,PID参数个体的优劣程度由适应度函数决定。首先根据变量喷药系统的调节时间和稳态误差构建适应度函数,即
(13)
式中e(t)—系统误差;
u(t)—控制器输出电压(V);
tu—上升时间(s);
w1、w2、w3—权值,取值分别为0.999、0.001和2.0。
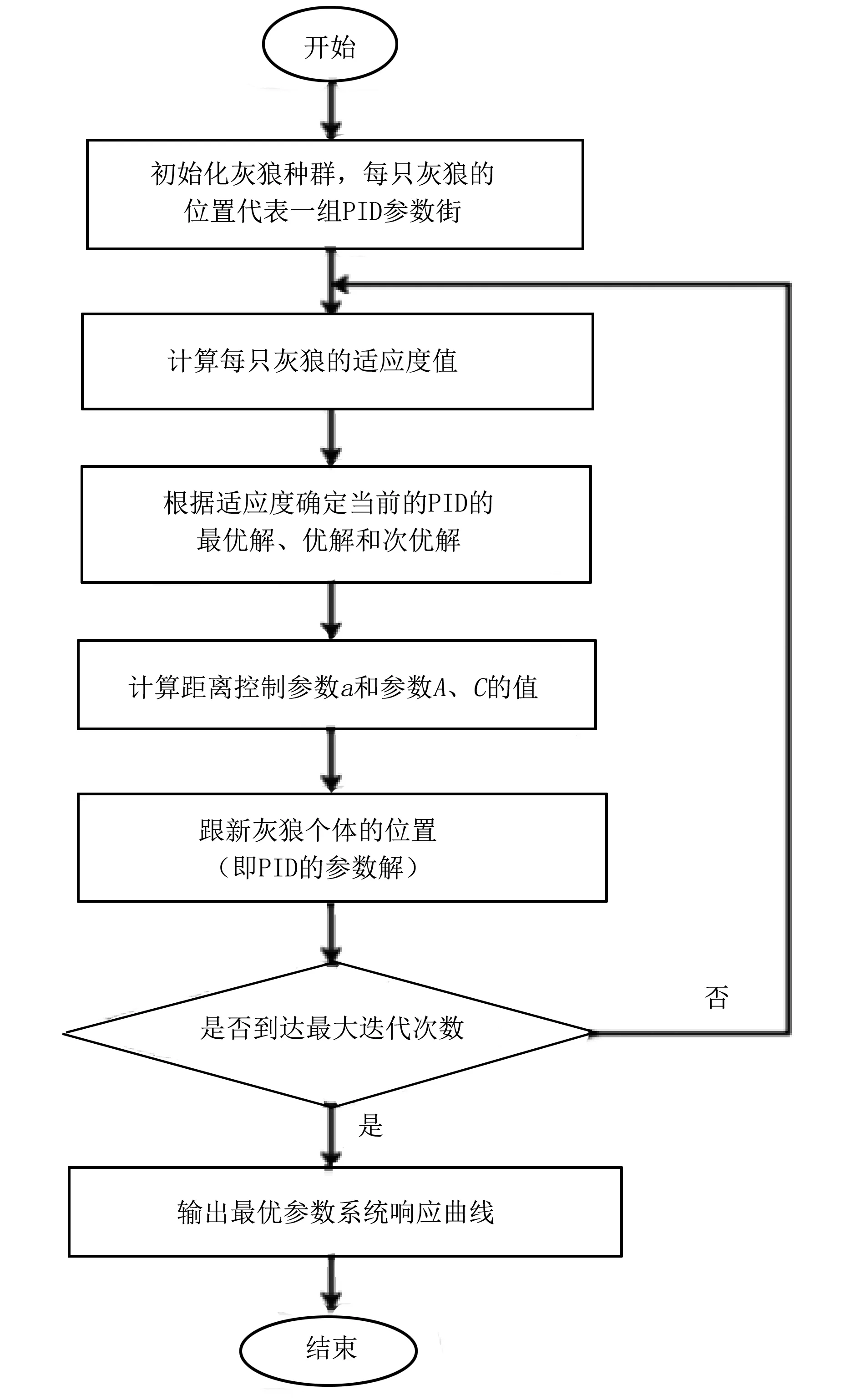
图5 GWO-PID算法流程图
为了定性地验证灰狼优化PID控制算法的有效性和可靠性,基于MatLab软件平台,采用式(13)的适应度函数,以单位阶跃为输入信号,分别对传统PID控制和灰狼优化PID控制两种控制方式进行仿真实验。灰狼优化PID控制算法的初始化参数设置为:种群大小为10,最大迭代次数为50,Kp的范围为[0,100],Ki的范围为[0,20],Kd的范围为[0,5]。仿真实验得到的系统响应曲线如图6所示;控制系统性能指标如表1所示。
由图6和表1可以看出:常规的PID控制在系统到达稳定状态时,仍存在较大的稳态误差,误差为3.54%,且系统的超调量较大;相对于常规PID控制,灰狼优化PID控制的稳态误差小,仅为1.32%,且系统的响应速度更快,调节时间为0.203 5s,低于传统PID控制的0.463 5s,系统的控制效果好。
4 变量喷药系统试验
为了验证GWO-PID算法的实际控制效果,在吉林农业大学工程训练中心WFS-II喷雾性能综合试验台进行试验研究。将本文设计的变量喷药控制系统搭载到试验台,如图7所示。
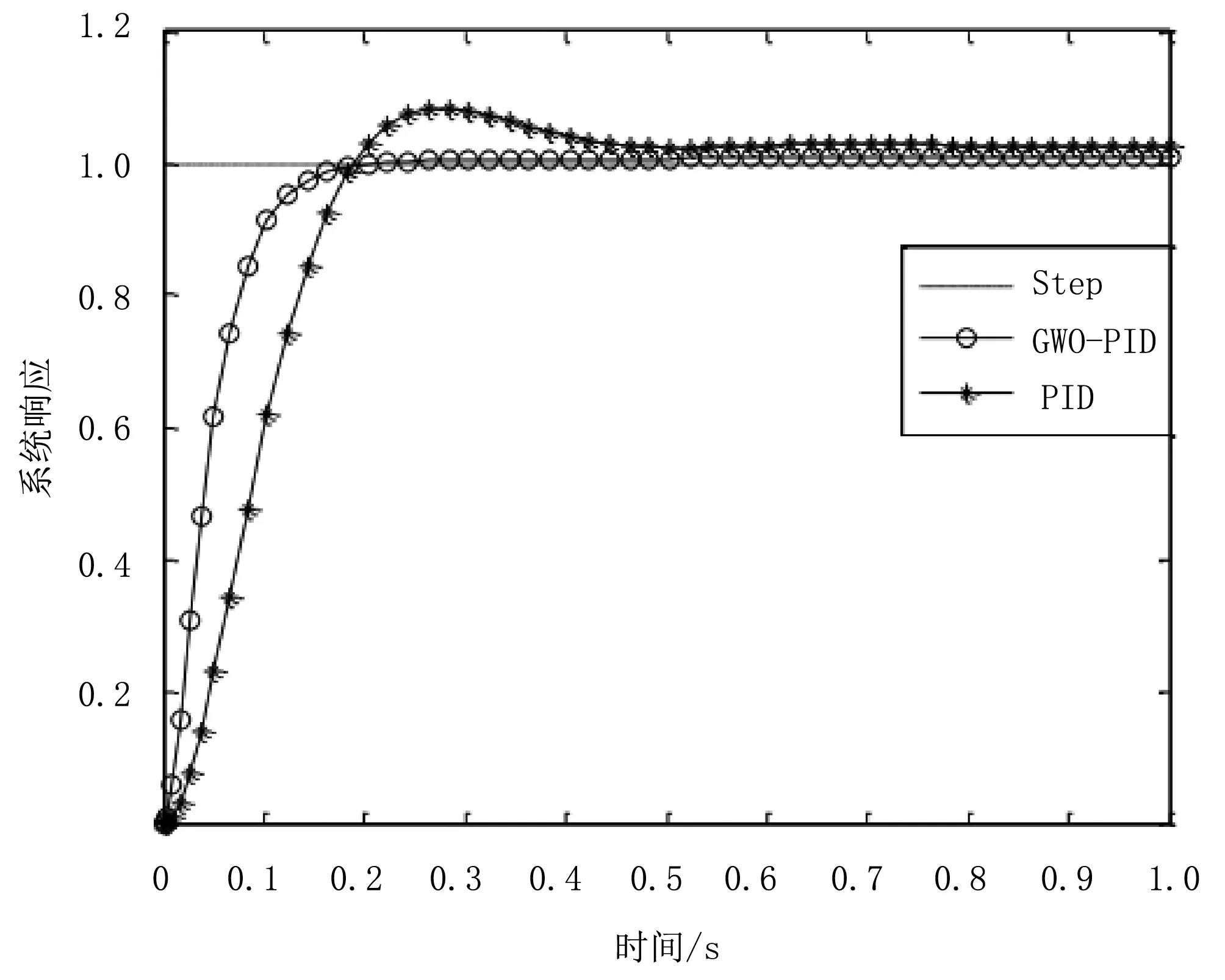
图6 系统响应曲线

表1 控制系统性能指标

图7 变量喷药试验台
在300kPa的系统压力下分别采用灰狼优化PID控制和传统PID控制进行喷药试验,喷药设定值范围0.75~1.25L/min,增幅为0.15L/min,试验结果如表2所示。
系统响应时间和稳态误差是衡量控制系统性能优劣的重要指标。由表2可以看出:在不同的设定值下,灰狼优化PID的响应时间都要快于传统PID,平均响应时间提高了21.4%,说明灰狼优化PID控制系统具备更高的响应速度。整体而言,灰狼优化PID的误差均低于PID控制系统。随着设定值的等幅增大,灰狼优化PID的稳态误差逐渐减小,平均误差为11.0%,低于传统PID的16.8%。由试验结果可知:灰狼优化PID控制系统响应速度快,稳态误差小,改善了传统PID控制系统的控制效果和稳定性。
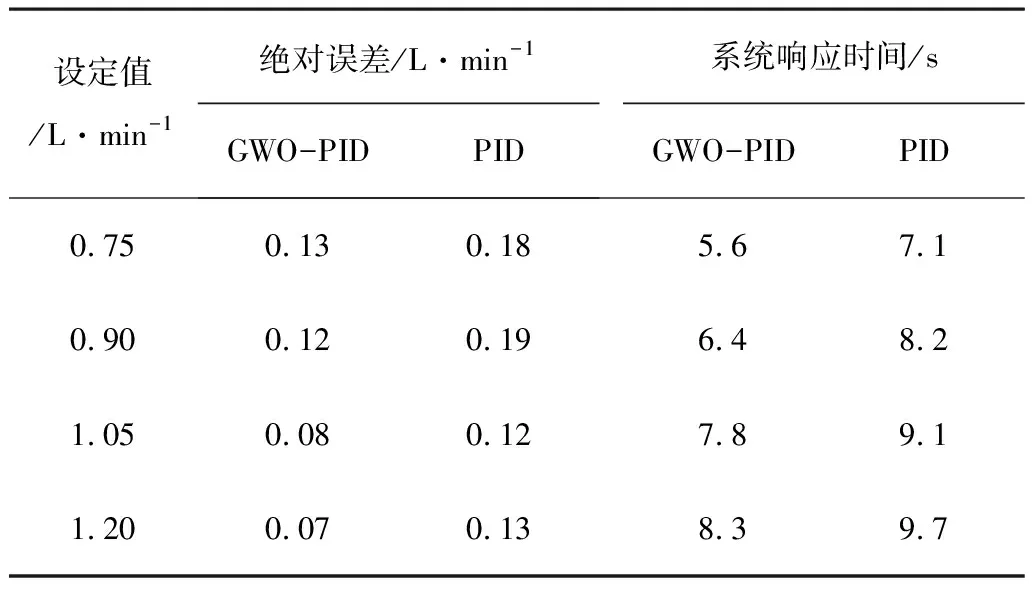
表2 试验结果
5 结论
1) 在深入研究变量喷药控制方式的基础上,针对传统PID控制方式的不足,将灰狼优化算法与PID控制结合,形成灰狼优化PID控制算法。以电动阀为执行机构,构建了变量喷药系统传递函数模型。为验证GWO-PID控制的有效性,基于MatLab进行仿真实验,结果表明:灰狼优化PID控制响应速度快,调节时间为0.203 5s,低于传统PID控制的0.463 5s,系统的稳态误差小,仅为1.32%。
2)在WFS-II喷雾性能综合试验台进行实际的变量喷药试验,结果表明:相对于传统PID控制,灰狼优化PID控制具备更快的响应速度,平均响应时间提高了21.4%;随着设定值的增大,灰狼优化PID的稳态误差逐渐减小,平均误差为11.0%, 低于传统PID的16.8%。由该试验结果看出,本文设计的基于灰狼优化PID控制的变量喷药系统响应速度快、稳态误差小、控制精度高,可为变量喷药系统的研究提供新的理论基础和技术方法。
猜你喜欢
湖北农机化(2021年7期)2021-12-07 17:18:46
小太阳画报(2019年1期)2019-06-11 10:29:48
数学大王·低年级(2018年5期)2018-11-01 10:34:06
山西建筑(2018年22期)2018-03-22 23:36:27
快乐语文(2016年15期)2016-11-07 09:46:31
设备管理与维修(2016年6期)2016-03-16 02:21:53
自动化仪表(2015年5期)2015-06-15 19:01:34
汽车维修与保养(2015年6期)2015-04-17 03:31:40
质量技术监督研究(2015年1期)2015-04-09 06:42:12
读写算(中)(2015年6期)2015-02-27 08:47:14
