
收割机远程监测系统的设计—基于云平台数据挖掘并行算法
2020-10-17 01:03吴东林张玉华
农机化研究 2020年6期
吴东林,张玉华
(漯河食品职业学院 信息工程系,河南 漯河 462300)
0 引言
无人驾驶收割机已经被初步应用到农业生产中,但由于受到远程监测和控制技术的限制,其作业效率、作业质量及作业安全性都影响了其大批量的使用和推广。随着计算机和网络技术水平的提高,远程监测技术得到了迅速的发展,云平台和并行计算计算也被引入到远程监测系统的设计上,从而可以实现大量数据的存储和处理,做到实时监测。这不仅可以提高监测系统的效率,还能够得到较高的存储空间和计算处理速度,从而提高收割机远程控制的精度,实现收割机的无人化自动作业。
1 数据挖掘和收割机远程监测系统
随着信息技术的发展与计算机网络的应用,农机远程监控技术被引入到农机设计上,并开发了无人驾驶农机设备,从而有效提高了农机的自动化程度。农机作业过程中,通过远程监测系统可以实现农机的定位及作业情况监测等功能。当农机作业过程中发生故障时,还可以通过报警方式通知远程端,远程端确认故障后做出响应。另外,采用远程监测系统还可以实现农机的合理调度。其流程如图1所示。

图1 监测系统功能流程
在作业环境、收割机状态监测和收割机定位过程中会产生大量的数据,这些数据可以采用云平台进行存储,并通过并行计算技术进行处理,最后对信息进行显示,农机管理人员可以根据信息对农机进行合理调度。
2 基于数据挖掘和并行计算的远程云监测系统设计
在收割机远程监控过程中,由于需要对其进行全天候的实时监控,因此会产生大量的监测数据,需要引入基于云平台的数据库;在进行数据存储和计算过程中,由于数据量较大可以采用分布式存储和并行计算方法;为了实现远程端监控,需要引入WEB应用服务和通信网络;另外,各模块之间还需要设计接口服务和后台分析等服务,以保证各模块之间顺利运行。收割机远程监测系统的硬件架构如图2所示。

图2 收割机监控系统硬件架构
在收割机实时监测时的数据采集、报警电路和控制电路都可以通过云平台进行数据处理,并利用对采集数据结果的并行计算和数据挖掘分析诊断收割机是否存在故障,如果存在故障可以通过显示屏进行显示。播种机的信息数据还可以通过通信网络传递到远程监控云端,实现收割机作业情况的远程实时监测。监测系统的软件结构框架如图3所示。

图3 软件功能框架图
收割机远程监测系统的软件应用功能框架主要由3部分组成,包括作业信息采集平台、前台应用和后台应用服务。其中,前台应用服务包括在线告警、信道监测、故障诊断、历史查询、GIS定位及终端异常等监测;后台服务包括收割机作业数据的综合分析和智能诊断、异常数据专家库、在线监测和异常判断、并行计算等。
为了满足系统软件应用服务功能,实现大数据分析,采用了分布式存储和并行计算架构,通过将采集得到的监控数据分布式地存储在多台独立计算机上,可以减少大量数据I/O操作,从而实现对收割机作业状态的智能诊断和离线分析。
分布式数据存储和并行计算框架利用Hadoop集群、分布式数据仓库、分布式计算架构、分布式文件系统及其组件,构建了高可靠、高可扩展、高效、高容错的服务层,可以实现收割机远程实时监测过程总产生的海量数据。分布式存储和并行计算作为两个层次,通过相互协调实现高速的数据存储和并行计算,结构框图如图4所示。

图4 分布式存储和并行计算架构图
为了提高收割机故障诊断的智能化程度,可以采用一些智能分类算法(如聚类分析、贝叶斯分类、多维关联规则等),通过对生成分类结果的专家打分分析得到故障诊断结果。诊断流程如图5所示。
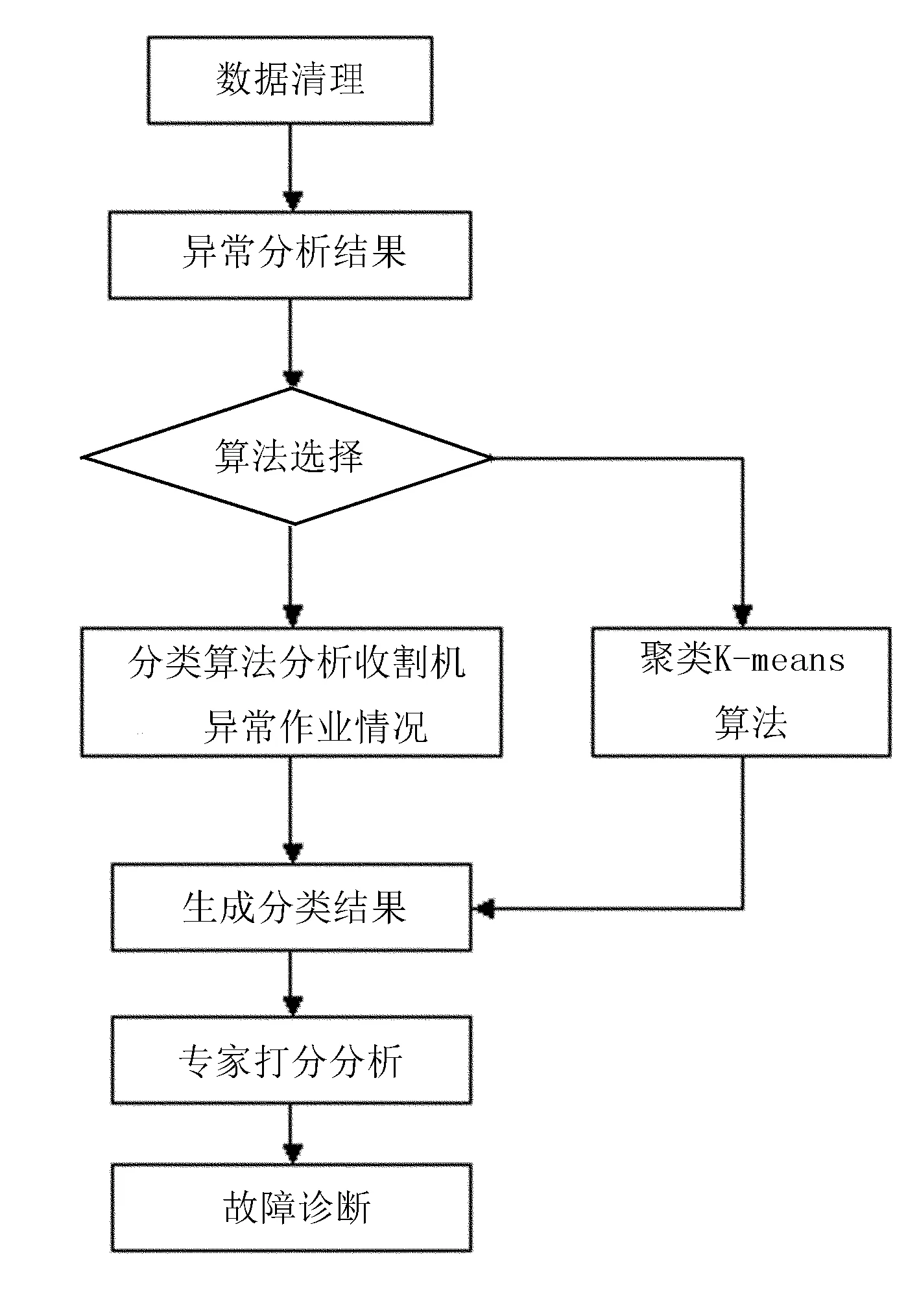
图5 分类和聚类智能诊断流程
聚类K-means算法是一种智能化程度较高的算法,可利用关联规则进行数据挖掘和分析。在进行分类时,首先统计含有一个元素项集出现的频率决定一维项目集,然后统计项目集的支持度。表1为一个简单的数据记录表。
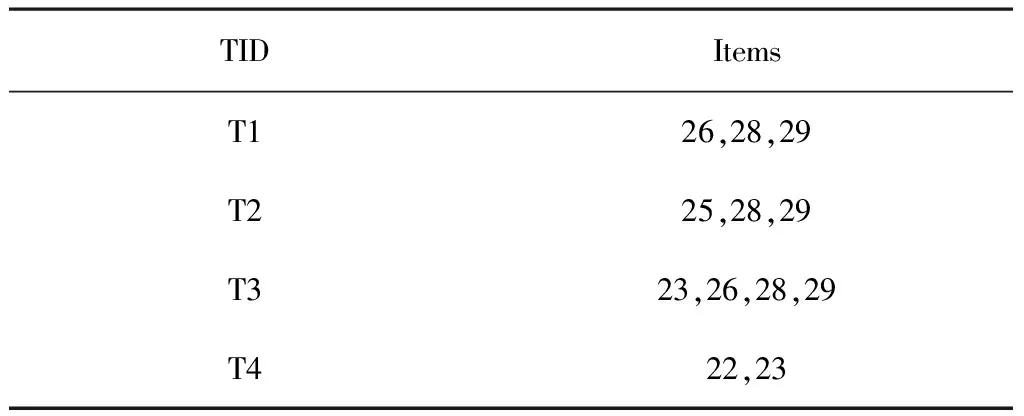
表1 数据记录表
在关联算法中,需要创建每个数据记录候选集的支持度,然后通过数据之间的关联性对数据进行分类。其步骤如下:

(1)
其中,Nj为第j个聚类域Sj中所包含的样本个数,求出均值向量后,将其作为聚类中心,计算均值。其函数规则为
(2)
对每个聚类的数据进行均值核算。

3 远程监测系统性能测试
为了验证云平台和并行计算技术在收割机远程监控系统中使用的可行性,以无人驾驶收割机为例,对其远程监测系统进行了设计,并对其监测系统的性能进行了测试。无人驾驶收割机作业过程如图6所示。
随着自动化技术的不断发展,无人驾驶收割机逐渐被使用在农业生产过程中。为了保证无人驾驶机械作业的正常性,需要对无人驾驶机械进行远程监测,远程监测系统采用云平台和并行计算技术进行架构。首先对监测系统通信的正常性进行测试,丢包率是反应通信是否正常的一项指标,通过测试得到了如图7所示的测试结果。

图6 无人驾驶收割机作业示意图

图7 丢包率测试曲线
由图7可知:基于云平台和并行计算技术的远程监测系统的通信精度较高,可以满足远程监测需求。为了进一步验证系统的性能,对远程监测后收割机的性能进行了测试,结果如表2、表3所示。
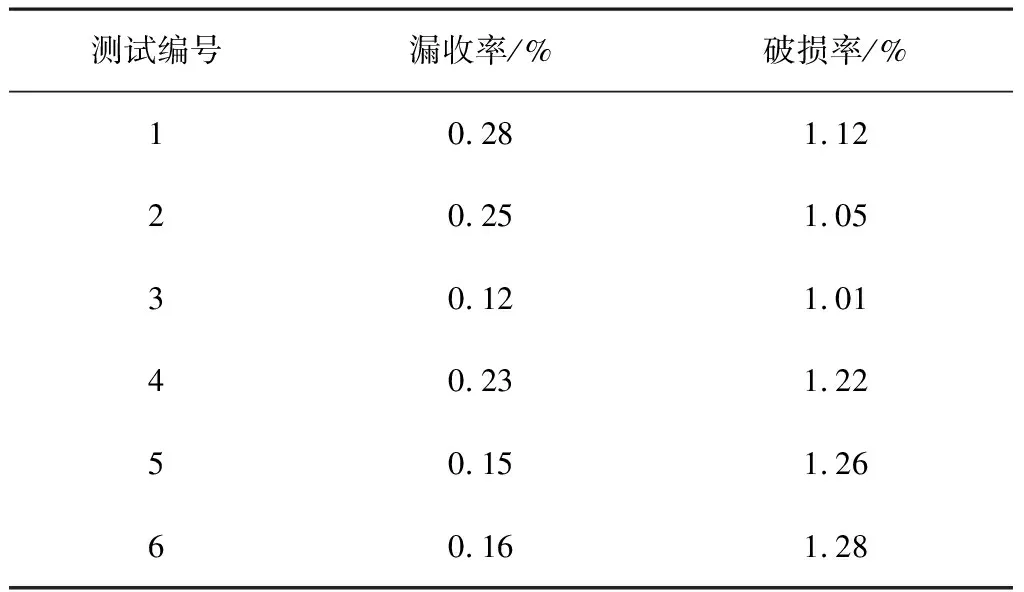
表2 收割机性能测试结果
在进行远程监测后,对收割机的收割机性能进行了测试。测试的项目主要包括漏收的概率和破损的概率。统计结果表明,采用远程监测系统后,收割机的漏收率和破损率都较低,可以有效地提高收割机的性能。

表3 收割时间测试结果
为了进一步验证远程监测系统的性能,对有无监测系统时播种机的作业效率进行了对比。通过对比相同收割面积所用的时间发现,有远程监测系统时收割机的作业效率会有所提高。这是由于采用远程监控系统后,农机管理人员可以根据收割机的实际作业进度和待收割地块的情况合理地对收割机进行调度,从而提高收割机的作业效率。
4 结论
为了提高无人驾驶收割机自动化作业水平和收割质量,将云平台和并行计算技术引入到了收割机远程监控系统中,有效地提高了监测系统的工作效率,为无人驾驶控制系统提供了数据支持。为了验证方案的可行性,以无人驾驶收割机的实际作业为试验对象,对远程监测系统的通信性能和收割机性能进行了测试,结果表明:采用基于云平台和并行计算技术的远程监测系统对于提高远程监测系统的监测效率和监测精度具有重要的作用。
