
新型农家肥果园自动施肥机的设计与试验
2020-10-17 03:10何晓宁王东伟尚书旗张玉洁常增村
农机化研究 2020年6期
李 娟,何晓宁,王东伟,尚书旗,张玉洁,常增村,邹 明
(1.青岛农业大学 机电工程学院,山东 青岛 266109;2.荣成市顺达车业有限公司,山东 威海 264300)
0 引言
我国水果种植面积和产量均已居世界前列,2016年的果园种植面积已达1 536.71万hm2,水果总产量达2.75亿t[1-2]。水果的产量和质量对果农来说是至关重要的,而施肥作业不仅会决定果树的生长发育,还会直接影响果实的质量及产量[3-5]。目前,我国果园施肥机械化和自动化水平均较低,严重制约了我国果园种植业的发展,因此研发适合我国实际情况的果园自动施肥机势在必行[6-7]。
众所周知,在果树生长的不同阶段,都要依据果树生长发育态势进行施肥、追肥作业。化肥和有机肥是最常见的两类肥料。国外对施肥机械研究得较早,在20世纪初期欧美发达国家对施肥机械就有所研究,到20世纪70年代欧美发达国家在施肥作业方面基本实现了全过程机械化作业[8-9]。相比较欧美发达国家,我国对施肥机械的研究就比较落后。对于化肥施肥,施肥机械主要有撒肥机械、施种肥机械、施追肥机械和施肥播种机械等[10-11]。目前,化学施肥成果较多:董可宏[12]等设计了SF-100摆动式颗粒肥料抛撒肥,解决了施肥机械容易产生堵塞、架空及撒施不均匀等问题,适用于中小面积水稻种植户;胡红[13]等设计了玉米行间定点扎穴深施追肥机,解决了玉米中后期追肥困难的问题,提高了工作效率和地表肥料的利用率;王晓东[14]等设计了2BF-1型自走式小型播种施肥机,解决了广大山区农民对自带动力播种机的需求。
对于有机肥,有液态和固态两种物理形态,我国施用的有机肥主要是农家肥[15]。我国对有机肥施肥机械的研究较晚,目前我国通常还是主要采用人工手动施肥,施肥机械类型大都以撒肥机械[16]为主。对于撒肥机械,张义胜[17]等设计了2XDF150型小型地表肥料撒肥机,其撒肥效率高、抛洒均匀,适用于山区和丘陵地区有机肥的撒肥;潘世强[18]等分析研究的有机肥撒肥机的水平单圆盘式撒施器对固态有机肥有较好的适用性,撒施均匀性好;吴宁[19]开发研究的2F50有机肥撒施机对有机肥含水率在20%~45%的情况下撒施效果良好;吴爱兵[20]等研制了有机肥施肥机,但对于含杂率高、湿度高的有机肥撒施效果不是很好。总的来说,我国研究的有机肥抛撒施肥机对粉状、含水率低有机肥有较好的抛撒效果,对含水率较高的有机肥的撒肥性能较差。为了解决含杂率高、含水率高的农家肥施肥不均匀问题,笔者自主研发了集耕地、施肥功能于一体的新型自动施肥机,实现了对含杂率高、不同含水率的农家肥的均匀施肥,能够满足果园农艺要求,以及不同阶段施肥、追肥作业的需求,推动了果园施肥机械的机械化和自动化。
1 系统总体结构和技术参数
1.1 系统总体结构
自动施肥机主要由机械部分、液压控制部分及电气控制部分组成。其中,机械部分主要通过轴的转动及链传动来实现动力传输,进而控制执行机构完成工作任务;液压部分主要由电磁换向阀、液压马达、各式液压泵及液压油管组成;电气控制部分主要由主控模块、测速模块、电磁阀控制模块及报警模块等组成。
1.2 技术参数
根据目前果园种植的农艺技术特点,设计的自动施肥机机主要技术参数如表1所示。
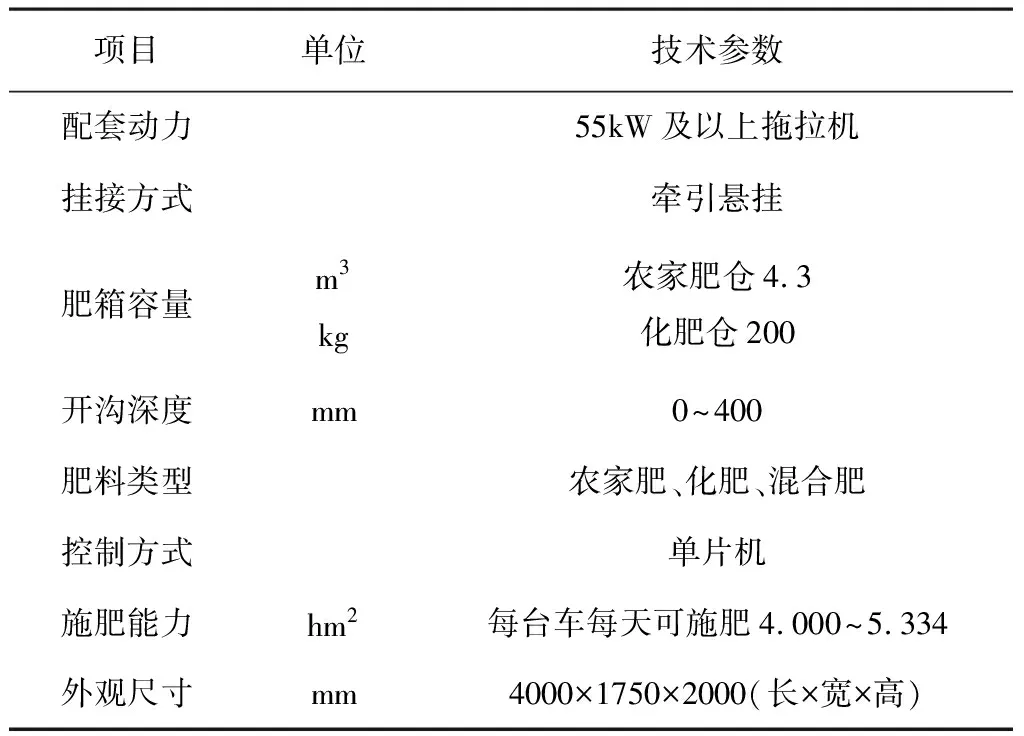
表1 自动施肥机主要技术参数
2 机械结构及工作原理
2.1 机械结构
自动施肥机主要由主变速箱、双齿轮泵、摆线液压马达、农家肥仓、化肥仓、链轮、推动铲、液压缸、单铧犁、覆土圆盘及动力输入装置等部件组成,如图1、图2所示。

1.增量编码器1 2.主变速箱机构 3.双齿轮泵 4.摆线液压马达 5.增量编码器2 6.主螺旋搅龙链轮 7.蓄电池 8.二级搅龙液压马达 9.二级螺旋搅龙传动链轮 10.二级螺旋搅龙 11.动力输送机构 12.化肥仓 13.推动铲 14.主螺旋搅龙 15.推动铲液压缸 16.液压油油箱 17.电磁换向阀
2.2 工作原理
自动施肥机主要以施农家肥为主。为了满足农户及不同作业情况的需求,在机具后面设计了一个化肥仓,可以同时对化肥和农家肥进行混合施肥。机具通过悬挂架与55kW以上拖拉机配套连接,整机动力由拖拉机动力输出轴经万向节传递与机具的动力输入装置连接;主变速箱带动双齿轮泵转动产生液压源,利用液压源带动二级搅龙液压马达和电磁换向阀工作;电磁换向阀通过换向实现摆线液压马达的正转和反转,通过联轴器链轮变速机构驱动两个主螺旋搅龙输送机构。其中,农家肥输送系统采用双体独立铰笼分段配送机构,改变了配送原理,肥料输送均匀,可以两种或两种以上肥料同步混合,出肥量得到控制。
机具尾部下方安装有可以拆卸的单铧犁进行开沟,工作时采用了深度可调偏置式开沟装置,实现了30cm深度范围内的自动调节。通过二级螺旋搅龙把肥料输送到开沟处,由可拆卸覆土圆盘进行覆土作业。在农家肥仓内的两边设计有推动铲,推动铲做往复运动,以防止农家肥产生悬料现象。整机的施肥量皆可通过调节肥料流量调节杆来控制。
3 液压油路控制部分
3.1 液压部分工作原理
机具在工作时,液压泵在主变速箱的传动下工作,液压泵将液压油油箱中的液压油经过过滤器、开关泵入减压阀中;电磁换向阀安装在减压阀后部,液压油经减压阀流经电磁换向阀分两路分别进入机具前部的摆线液压马达和后部的二级搅龙液压马达中,进而通过链传动将动力分别传输到主螺旋搅龙轴和二级螺旋搅龙轴上,从而控制搅龙转动,实现肥料输出。
工作过程中,为防止旋转搅龙被有机肥中的异物堵塞,采取电磁换向阀实现油路的转换,进而实现搅龙的正反转。电磁换向阀在接收到增量编码器的反馈信号后,实现自动换向,使搅龙反转,将异物转出;异物排出后,再进行一次换向,机具继续正常工作。
3.2 整机液压油路布局
图3为自动施肥机的液压油路布局图,机具中的液压管路由单片机控制电磁换向阀换向。
4 电气控制部分
4.1 系统组成
电气控制部分包括硬件系统及软件系统两部分。其中,硬件系统主要包括主控电路、电磁阀控制电路、测速电路、报警电路及供电电路等。其工作原理为:利用单片机内部两个精确到微秒的定时计数器统计1个周期内的脉冲数,进而转换成一级搅龙的速度和动力输出轴的速度;利用一级搅龙的速度和动力输出轴的速度判定有机肥仓内是否有杂物卡住一级搅龙,进而对电磁阀进行换向控制,在无法排除故障时进行故障报警。
4.2 硬件系统
4.2.1 主控模块
考虑到农业机械的经济性、可靠性的需求,主控CPU采用抗干扰能力强、可靠性高、低功耗的AVR系列的ATmega16_DIP40[21-22]。该单片机不用外扩ROM和RAM就能满足该系统的系统代码需求,简化了外围电路的设计[23]。另外,该单片机内部集成两个定时计数器和电平转换电路,就能实现对动力输出轴和一级搅龙速度的测量。主控模块包括单片机、供电电路、晶振电路及复位电路等。
4.2.2 电磁阀控制模块
电磁阀控制模块用于当搅龙被异物卡住时进行反向旋转从而将异物反向旋出,当搅龙被卡住而停止转动时单片机控制电磁阀实现换向,如图4所示。
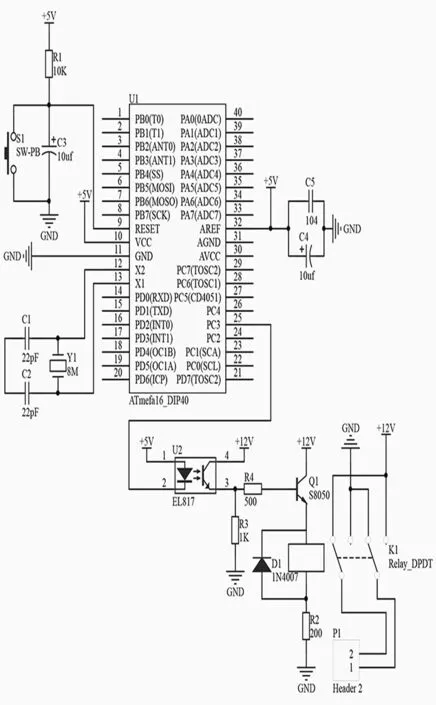
图4 自动施肥机电磁阀换向电路图
4.2.3 测速模块
测速电路用于检测设备动力输出轴和一级搅龙的转速,如图5所示。光电编码器选用了IHA8030编码器,其参数为额定电压12V,分辨率100PPR,抗震等级5g,输出信号为差分信号,有效保证了工作时的抗干扰性。光电编码器输出的差分信号经过DS90C032B芯片转换为单端信号直接输入给单片机。该测速模块外围电路具有简单、抗干扰性强的特点,实现了在复杂工况下对速度的测量。

图5 自动施肥机测速电路图
4.2.4 其它模块
报警模块用于故障无法自动排除时的声音报警。其中,S8050起到开关的作用,经过下拉电阻,使蜂鸣器的输入引脚保持在低电平,当单片机输出高电平时S8050导通使蜂鸣器发出报警声音提醒司机。
稳压电源模块的主要功能是产生能够持续为单片机供电的稳压电源。将蓄电池12V电压经过滤波之后接入LM2596S芯片输出5V电压,经过滤波电容和电感的作用使输出波纹减小,得到稳定的5V电压,可输出电流为3A,满足了为单片机供电的需求。
4.3 控制系统软件设计
控制系统软件设计主要包含了系统初始化、定时、测速、电磁阀换向、报警等,采用C语言编程。系统主程序流程图如图6所示。

图6 自动施肥机控制程序流程图
5 田间试验
5.1 试验过程
为适应果园施肥的实际需要,动力系统选用扭矩储备系数大、强劲有力、操作轻便灵活、安全可靠的海山HS554轮式拖拉机,配套动力55kW。
试验前,先通过牵引销将施肥机与拖拉机连接,连接施肥机油缸与液压,保证各处无渗漏;然后,启动拖拉机,空车试验底盘油缸提升、下降及推动铲往复运动情况,保证各运动自如,无卡滞现象,并将底盘提升到最高位置;最后,将单铧犁加装到犁横梁处,并插上穿销;将调试好的施肥机开到试验田里,初步试验几次,确定开沟深度,试验好后,开始作业。
试验在荣成市果宝悦园种植基地进行,试验时间为2018年4月12日。试验基地是标准化种植苹果园,行距4m,株距80~100cm,苹果种植基地总面积42hm2,试验施肥作业面积14 hm2。试验时,机具在苹果园行距中间行驶作业,根据树根生长特点,施肥机施肥在距离树桩50~60cm处完成1个行距的作业后机具转至邻行继续作业。根据当地农户对苹果园施肥作业要求,本次试验对果园进行开沟覆土施肥作业,肥料是当地农户存储下来的农家肥,并对机具的工作效率及机具性能进行了测试。自动施肥机试验样机如图7所示。

图7 自动施肥机试验样机
5.2 试验结果
所设计的自动施肥机适用于沙壤土、丘陵地、黑土地等,可广泛用于现代果园施肥。表2、表3为开沟深度及农家肥含水率对施肥速率影响的试验数据。
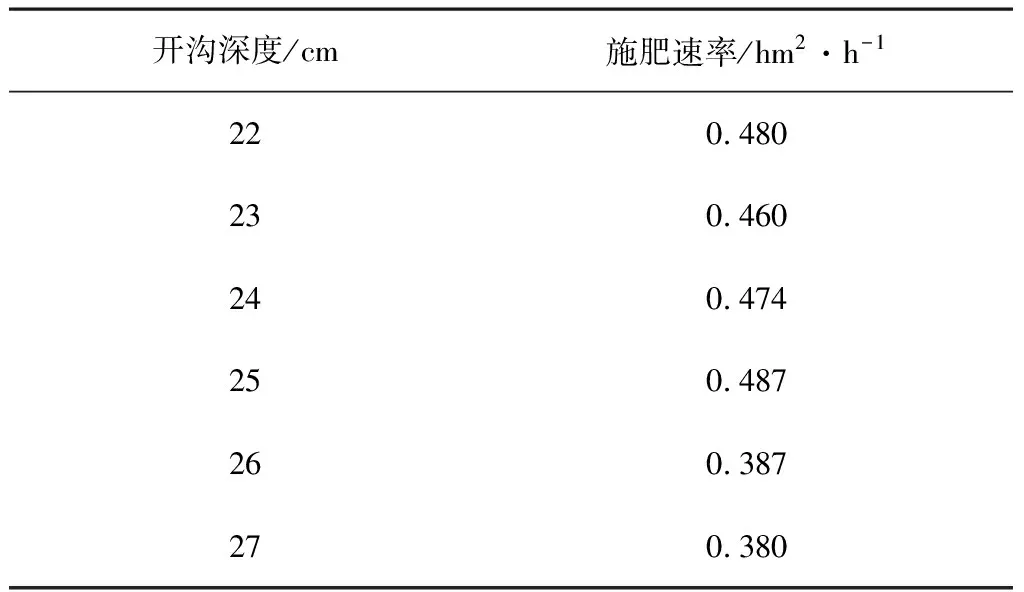
表2 开沟深度影响施肥速率表

表3 农家肥含水率影响施肥速率表
试验结果表明:①整机不受农家肥含水率的影响,且施肥较为均匀,能充分发挥整机自动化效率高的优势;②1台施肥机每小时能够完成0.400~0.534hm2的施肥作业,而在人工施肥的情况下8~10个作业人员每小时仅能够完成0.334~0.400hm2的施肥作业。也就是说,单位时间内利用自动施肥机施肥比人工施肥工作效率提高了20~40倍。
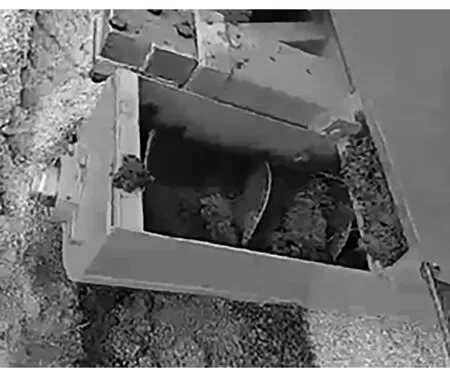
图8 自动施肥机施肥作业图
6 结论
本文研发了机、电、液一体化的自动施肥机。针对目前我国还没有对任意含水率的农家肥进行施肥的机械,该施肥机实现了对任意含水率农家肥的均匀施肥,并可进行抛洒施肥或者混合施肥,做到一机多用。同时,该施肥机实现了故障的自动检测、报警和自修复控制。试验结果表明:该自动施肥机不仅能广泛用于现代果园施肥,还可用于西洋参、玉米、花生、小麦等大片农作物的耕地施肥。下一步的研究重点是实现施肥的智能化和无人化。
