
助听器双重反馈抑制算法中的参数效应研究
2020-10-14 07:42:46凃磊任杰赵坚方文南王桦
中国听力语言康复科学杂志 2020年5期
凃磊 任杰 赵坚 方文南 王桦
1 引言
随着社会老龄化的日益加剧及人们对听力干预与言语康复的重视程度越来越高,助听器的发展逐渐受到国家及社会各界的广泛关注。对于大多数配戴助听器满意度不高的听障患者,声反馈现象是最主要的原因之一。助听器声反馈现象是由于助听器受话器的输出声被麦克风拾取后再次放大形成循环回路而产生,此时会出现啸叫声,对助听器配戴者的言语清晰度产生影响,甚至会损伤配戴者的残余听力,长期处于啸叫状态下的助听器更容易出现质量问题[1]。因此,抑制或消除声反馈一直是助听器技术研究的前沿热门领域。由于人的耳道、耳背机耳模以及耳内式助听器外壳对于高频声信号的衰减作用不明显,使得1500 Hz 以上的中高频信号较低频信号更易引起声反馈,从而导致同等增益下助听器在高频易产生啸叫。由于声反馈的存在,听力师在处理下坡型听力损失(尤其是高频陡降型听力损失)时,很难在验配助听器过程中给听损者提供足够的高频补偿,以保证较高的言语清晰度。因此,如何最大程度的利用助听器提供的反馈抑制功能保证高频陡降型听力的听损者足够的高频补偿,对于听力师临床工作有重要意义。
声反馈现象的产生条件与助听器本身、助听器配戴者的听力损失情况以及实时多变的声学环境相关,最早的助听器反馈抑制技术利用耳背式助听器耳模,衰减从受话器到麦克风反馈路径的物理方法抑制声反馈。随着数字助听器的出现,利用数字信号处理技术进行反馈抑制的方法被采用。经过发展及演变,如今主流的助听器反馈抑制算法可分为三类,分别是陷波滤波器法、自动增益频率响应控制法以及自适应滤波器反馈路径抵消法[2]。陷波滤波器法的基本思路是通过检测单音信号或啸叫,生成一个陡峭的陷波滤波器对较窄频段内的回声信号进行限制,达到消除反馈的目的,这种方法对啸叫探测的灵敏度和准确性要求很高,当系统中多个频率产生啸叫或声学环境突然变化时就会难以应付[3]。而另两种反馈抑制方法即是本文的研究重点,通常我们把同时使用这两种方法的助听系统成为双重反馈抑制系统。
本文通过对采用较先进的双重反馈抑制算法的助听器中不同参数的效应进行研究,希望给广大听力师或临床工作者提供助听器验配指导。
2 反馈抑制算法的理论原理
2.1 声反馈现象的产生
声源所发出的信号由助听器的麦克风接收后,经过助听器芯片处理,即前向路径[G(Ω,n)]通过受话器在配戴者鼓膜附近发声。同时,受话器播放的声音信号会不可避免的通过反馈路径[F(Ω,n)]后,传回麦克风,形成声信号的反馈闭环。
前向路径G(Ω,n)涵盖了所有在助听器中用到的信号处理方法。声音在通过反馈路径时除了在不同频段上有不同程度的衰减外,还会因为声音传播而产生延时。因此,F(Ω,n)是由反馈路径自身的声学特性、麦克风及受话器的频率响应以及模-数、数-模转换模块共同决定。
系统产生声反馈引发啸叫需要满足以下两个条件:

所以,反馈抑制算法是通过让上述两个条件中的某个不成立抑制啸叫的产生。
评估某系统在抑制声反馈方面的性能时,通常需要用到一个关键指标,即净空增益(added stable gain,ASG)。净空增益是指反馈抑制算法给助听器在未产生啸叫的前提下带来的额外稳定增益。ASG 越大,系统在反馈抑制性能就越好[4]。
2.2 反馈抑制算法及主要参数
不考虑耳模或助听器外壳的密闭程度所造成的声反馈现象,目前常用的针对增益过大产生啸叫的反馈抑制方法主要有:①增益-频率响应控制,即通过降低啸叫风险高的频率上放大增益;②反馈路径抵消,即通过在系统中把麦克风重新拾取到的输入信号从系统通路里减去,抵消反馈路径;③频率及相位控制,即在助听器处理的前向路径中加入频率或相位的改变。3 种方法都是通过破坏等式(1)中的不稳定条件来提升系统稳定性来抑制啸叫的产生,其中前两种是针对条件1 而后一种是针对条件2的,由于频率及相位控制的方法会引入较大失真,只会在较特殊情况下才会考虑使用(如高频陡降型听力的听损者使用到移频或频率转换功能),所以在此不作详细讨论。
增益-频率响应控制法是针对等式(1)中声反馈产生的第一个条件抑制啸叫产生,即对一个特定频率的反馈振动的发生,避免在此频率上从麦克风传到鼓膜处的前向增益在绝对值上超过从鼓膜处返回麦克风的反馈增益。因此,如果能够实时估计反馈路径并与助听器当前的前向路径进行比对,当评估出某一个频率上的啸叫风险较大时,就能自适应控制该频段增益至啸叫不产生,而平时正常情况下无啸叫风险或啸叫风险低时,则不对增益做任何处理。
以图1、图2 为例解释说明增益-频率响应控制法的工作原理,图中有三角形标记的曲线代表的是取负向后的前向路径频率响应,无三角形标记的曲线代表瞬时估计得到的反馈路径频率响应,当反馈路径曲线高于负向前向路径曲线的时候,等效于,则代表该频率点有产生啸叫的风险,用圆点标记。增益-频率响应控制法中的一个重要参数是增益空间。考虑到实时反馈路径频率响应估计的准确性和稳定性有限,通常会人为控制频率增益比允许上限更低,保留空间以降低系统中的反馈风险。增益空间的定义是以不产生反馈为前提,系统所允许的负向前向路径增益的最大值(通常即为所估计反馈路径频率响应值)与实际人为控制的负向前向路径增益最大值之间的差异。数学关系上是前者减去后者,因此如果增益空间是正数,则表明系统允许某种程度上的反馈发生,绝对值越大,反馈发生的几率越大;如果增益空间为负数,则表明系统有意识降低反馈发生的几率,绝对值越大,反馈发生的机率越小。图1 和图2 中是对同一台助听器在设置相同增益(MSG 以上20 dB)时,设置不同增益空间参数值而达到的不同效果。当增益-频率响应控制法中的增益空间为10 dB 时,从图1 的瞬时响应动态图中可看出,系统平均增益约34 dB,基本上没有对增益进行控制,并且反馈的风险很大;图2 中的增益空间设置为-10 dB,助听器平均增益大概在20 dB 左右,几乎没有反馈风险。因此,笔者从理论上推断,增益-频率响应控制法会降低助听器的实际增益,不会提高放大系统的净空增益。
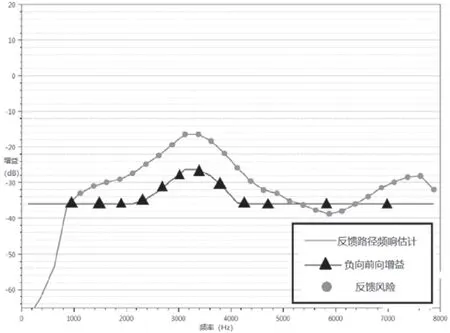
图1 当目标增益为MSG 以上20 dB 时,增益-频率响应控制法中增益空间为10 dB 的瞬时响应动态图

图2 当目标增益为MSG 以上20 dB 时,增益-频率响应控制法中增益空间为-10 dB 的瞬时响应动态图
反馈路径抵消法与增益-频率响应控制法不同,它可以持续地监视整个系统传声通路的变化并利用对真实回声路径的估计在反馈产生之前,虚拟了一个回声抵消路径来抑制反馈环路的形成,所以在达到极致上限条件之前,系统都是不会产生反馈的。使用自适应滤波器的反馈抑制系统,比没有使用自适应滤波器的反馈抑制系统所能提供的增益要高,也更容易满足听损人士对中高频听力补偿的需求。自适应反馈抑制(adaptive feedback suppression,AFS) 是常用的一种利用自适应滤波器来抑制反馈产生的方法[5],AFS 算法的工作原理如图3 所示[6]。

图3 自适应滤波器反馈抑制算法原理图
因为所需模拟的反馈路径会随环境实时变化而变化,因此在设计自适应滤波器的时候需要考虑能够快速跟踪到这种环境变化,最常用的自适应估计算法有最小均方算法(least mean square,LMS)[7,8]、标准最小均方算法(normalized LMS,NLMS)[9,10]、可变步长最小均方(variable-step-size LMS,VLMS)[11]以及递归最小二乘算法(recursive least square,RLS),这些算法都是通过迭代的方法最小化均方误差目标函数或通过最小二乘实现对目标系统的估计,而在迭代的过程中涉及单次迭代的步长可以控制自适应滤波器的更新速率,与后文参数相关。
反馈路径抵消法中的重要参数包含两方面:①启动与初始化时间。当助听器合上电池舱门开始工作时,反馈抑制算法还处于一个初始状态,因此就需要算法快速自我调整到一个较好的工作状态,从而能够很好地对反馈路径进行初步估计。因此,在算法进入正常工作模式之前,所需要的时间我们就把它称为启动时间,通常设置在1~59 秒。②自适应调整速度。即是反馈抑制算法在反馈估计中更新的速率,如果这个速率被持续设置为比较快,系统会对很快的侦测到反馈现象并进行抑制,但是如果系统长期处于无啸叫产生的状态下,这样的设置会造成较大失真并且不必要的计算也会加大助听器功耗;相反,如果设置为比较慢的时候,反馈现象在被抑制前可能会持续较长的一段时间,但是声音失真较小。这样的切换机制通常由激活灵敏度、激活速度以及激活时间这3 个参数共同决定。系统激活速度越快,激活时间越长,越有助于系统快速应对处理多变的声学环境。当系统处于反馈抑制空闲状态,空闲速度则决定了当处于无反馈的状态时,系统所采用的反馈抑制更新速率,通常会相对激活速度要慢很多。
3 实验方法及步骤
本实验选取某载有内置算法的助听器放大器进行实验,该厂商所使用算法即是使用双重反馈抑制算法消除啸叫[12]。
3.1 实验方法
①分析两种独立的反馈抑制方法对反馈抑制性能的提升;②研究双重反馈抑制是否能协同作用配合提升助听器的反馈抑制性能;③通过不同的参数集合的助听器设置比较净空增益、反映速度、收敛速度等反馈抑制性能指标对助听器验配提供临床指导;④同时评估评估助听器的补偿效果、言语清晰度并结合负作用综合考虑。
3.2 实验条件
设置助听器放大器各通道小声增益及最大输出功率相同,平均增益在30 dB±3 dB 范围内为初始状态,压缩比皆为1:1 即线性放大状态,关闭语音增强、脉冲噪声抑制、风噪声抑制及其他功能,尽可能避免其它功能对反馈抑制功能的性能分析结果的影响。此时助听器频率响应曲线主要由麦克风、受话器的频响曲线决定,通常为1000 Hz 以下频率较为平坦,2000 ~5000 Hz 有共振峰,这样的频响曲线在临床上具有参考价值。
3.3 实验设备
①丹麦国际听力(Interacoustics)的Affinity 型助听器分析仪以及TBS25 测试箱;②美国GRAS 制造仿真耳一对,与杭州爱华制造头戴耳机测试架、仿真嘴、传声器、前置放大器及耦合腔共同组成仿真实验模块;③以仿真耳耳道为模型制作的CIC 助听器,其中采用楼氏EM24446麦克风及SONION 的E50DA012 受话器;④音频频谱分析软件。在测试时所播放的声音文件为由白噪声、言语声、鸟叫声、音乐声组成的混合声音文件。白噪声完成自适应滤波器的初始化,言语声模拟日常的言语沟通使用环境,而鸟叫声及音乐声评估反馈抑制的稳定性及负作用大小。
3.4 实验步骤
①同时关闭增益-频率响应控制及反馈路径抵消功能;②测量并记下最大稳定增益MSG,然后开启反馈路径抵消功能,测量并记下净空增益ASG;③用一块隔板模拟遮挡物来反射声音并逐渐由远及近靠近配戴助听器的仿真耳来制造反馈并观察反馈路径抵消功能的不同反应,之后调整不同的启动时间、激活灵敏度、激活速度、激活时间、空闲速度等自适应反馈抑制参数值进行比较;④按照从步骤③中选取一组相对最优的反馈路径抵消功能参数设置助听器,开启增益-频率响应控制功能,测量并记下净空增益ASG;⑤调整增益-频率响应控制中不同的增益空间参数值并比较ASG 以及实际测量增益;⑥在以上实验中未产生啸叫的情况下,要观察分析其音质、夹带或其他负作用效果。
4 实验结果及分析
①关闭增益-频率响应控制功能时,自适应反馈路径抵消功能所提供的净空增益为10 dB。②不同启动时间对反馈路径抵消功能影响并不大。③对于激活灵敏度测试了从低到高共40 档个不同数值,取第36 档数值最为合适。④综合调试激活速度(共5 档)和激活时间(0.1~10 秒)两个参数之后,发现当激活速度取第2 档,激活时间取1.2秒的时候最为合适。⑤对于空闲速度测试了从低到高共10 档,发现取第6 档左右性能最好,空闲速度的参数效应可参照激活速度。⑥按照上述②~⑤选取一组相对最优的反馈路径抵消参数以后,开启增益-频率响应控制功能,净空增益可进一步提高,通过调整不同增益空间数值(-16 dB ~16 dB)可发现调整至-8 dB 时为最好,既能提升净空增益至18.3 dB,又能保证增益补偿效果无较大差别。⑦当增益空间给到-16 dB 的极端情况时,虽然看起来净空增益的测量值可以提高很多,但是实际增益已经远小于调试所显示数值,因此该指标不再具有表征意义,也会使配戴者的听力补偿及言语清晰度造成很大影响。
根据以上实验结果,笔者作出如下讨论。①反馈路径抵消功能中的各项参数调整围绕着系统对反馈出现后的反应速度和消除反馈的速度快慢进行,速度快慢的选择要综合声音信号音质的考虑。②反馈路径抵消功能本身就能提供可观的净空增益,加上增益-频率响应控制功能协同作用后的双重抑制机制则可以提供更高的净空增益。虽然理论上增益-频率响应控制功能不会提高系统的净空增益,但是常遇到的反馈啸叫是在较为极端条件下产生的,如头发挡住耳朵,吃饭或讲话张开嘴巴或两人拥抱的时候,听力师的处理方法通常是为了防止在这些发生频率不高的极端情况下不啸叫而牺牲掉部分增益造成听力补偿不足,而增益-频率响应控制功能恰好能很好地避免这样的补偿不足发生;③本实验中所测量出的净空增益可能与某些助听器厂商所宣传的有出入,不同实验环境和实验方法下所测量的净空增益指标有明显区别,本研究的 重点在指标相对数值的比较上进行性能分析,因此,指标参数的绝对数值不具备很强的表征意义。
5 结论
本文通过对助听器中使用的双重反馈抑制算法进行性能分析,得出以下结论:①反馈路径抵消功能与增益-频率响应控制功能的双重反馈抑制机制能够协同作用提供不错的净空增益保证配戴者的高频补偿;②增益频率响应控制功能的参数调试时要在提供极端条件下抑制啸叫作用的同时保证不会影响常规声学环境下工作时的增益补偿;③反馈路径抵消功能的参数调试基本上是综合考虑系统对反馈的反应速度、处理速度以及配戴者所要求的音质决定。对反馈现象的反应速度和处理速度设置的越快,啸叫发生的机会减小,但是音质就会降低,失真度提高,尤其是听音乐的时候。
猜你喜欢
基层中医药(2022年5期)2022-10-24 01:27:32
交通科技与管理(2022年8期)2022-05-07 23:54:10
辽河(2022年1期)2022-02-14 21:16:19
辽河(2022年1期)2022-02-14 05:15:04
宝藏(2021年3期)2021-04-20 09:35:56
消费导刊(2018年8期)2018-05-25 13:19:34
电子制作(2018年2期)2018-04-18 07:13:31
制造技术与机床(2017年8期)2017-11-27 02:10:17
上海公路(2017年1期)2017-07-21 13:38:33
光学精密工程(2016年5期)2016-11-07 09:06:16
