
模糊控制在电动汽车制动系统设计
2020-10-13 09:37韩风
微型电脑应用 2020年9期
韩风


摘 要: 主要对电动汽车制动系统进行了研究和设计,以制动系统工作原理和模糊控制理论为依据完成了一种针对电动汽车制动系统的模糊控制器的設计,结合运用ADVISOR(基于其原有反馈制动系模型)和模糊控制原理建立了制动系统模糊控制模型,实现了对反馈制动控制模块的进一步优化。在ADVISOR仿真环境下针对几种典型循环工况进行整车模拟仿真实验,结果表明该模糊控制模型更具优越性,能够使电动汽车的能量回收质量及效率得到显著提升,验证了所构建的模糊控制模型的可行性,有利于延长汽车的续航里程。
关键词: 电动汽车; 制动系统; 模糊控制; ADVISOR; 实现路径
中图分类号: TP 273 文献标志码: A
Abstract: This paper mainly researches and designs the braking system of electric vehicles. Based on the working principle and fuzzy control theory of the braking system, a fuzzy controller design for the braking system of electric vehicles is completed. Its original feedback braking system model and fuzzy control principle are completed, and further optimization of the feedback braking control module is also completed. In the ADVISOR simulation environment, vehicle simulation experiments are performed for several typical cycle conditions. The results show that the fuzzy control model is more superior and can significantly improve the energy recovery quality and efficiency of electric vehicles. The feasibility of fuzzy control model is helpful to extend the cars cruising range.
Key words: electric vehicle; braking system; fuzzy control; ADVISOR; implementation path
0 引言
目前电动汽车尤其是纯电动汽车产业成为国家大力扶持发展的对象,不断推出的相关补贴政策推动了该行业的快速发展。现阶段因受到电池技术的限制导致用户的长途行驶需求难以得到有效满足,电动汽车电池技术的提升和优化仍然是领域内的一项研究重点,但大多集中在实验室阶段,尚未在实际应用中普及。这就对电动汽车制动系统提出了更高的要求,在提高电动汽车续航能力方面制动系统及相应的再生制动控制策略成为一种重要的技术支撑手段,制动技术更加成熟且更节约成本,再生制动控制策略的目的在于确保车辆安全制动的同时,实现对再生及前后轮摩擦制动力在总制动力中占比的合理分配,从而回收更多制动能量,为此本文主要设计了一种基于模糊控制的再生制动控制策略[1]。
1 现状分析
应用范围不断扩大的电动汽车是实现节能环保目标的一项有效手段,电动汽车制动系统通过再生制动能量回收能量(以减速制动时的部分动能为主)并转化为电能后储存以供车辆使用,可有效弥补电动汽车的低电池密度低带来的续驶里程短问题,其工作原理为:在定子上线圈的磁场转速小于固定转子转速的情况下,由转子切割磁场形成制动力矩(通过产生感应电流与电动势实现)阻止轮毂转动,同时在电池或超级电容中存储产生的电能。轮毂电机驱动的电动汽车集成驱动、传动和制动于一体,在简化汽车结构的同时有效提高了转矩控制能力及精准度,具有操作简单、易维修等优势,为制动能量回收带来了有价值的研究方向,针对此方面的研究已经取得了一定进展,例如,针对前轮电机驱动车辆提出的典型制动力分配控制策略,基于并联再生制动控制策略的研究成果提出的一种再生制动神经网络控制策略;针对制动能量通过增大电机再生制动力实现回收效率的有效提高;针对再生制动控制提出的一种基于模糊控制逻辑的分配策略,并通过设计的车轮液压制动力控制方案实现了再生与液压制动的协调控制;以制动能量回收和确保制动安全性能为目标设计的ABS和再生制动的集成控制策略;针对混合动力电动汽车通过运用最优控制理论有效缩短了再生制动系统对识别驾驶员制动意图所需时间,并显著提高了制动能量的回收率;通过运用AMESim模型(包含ABS气压制动系统)深入研究了再生制动与制动防抱死的集成控制策略;针对纯电动客车提出了一种分段复合的制动系统再生控制策略,相比于原车制动能量回收率提高了约3%[1]。本文主要以轮毂电机驱动电动汽车作为研究对象,进一步完善制动系统部分结构,在此基础上设计了一种制动能量回收控制策略和模糊控制逻辑,对前后轮制动力采用固定比例的分配策略,可获取电机制动力(机电复合制动模式下)占总制动力的系数,实现了制动能量的高效回收,能够达到制动防抱死目的(紧急制动工况下),同时可确保车辆制动的稳定性,延长了汽车续驶里程。
2 制动系统设计
在传统液压制动系统的基础上保留了制动操纵机构,通过加入高压蓄能器和回路控制阀重新设计了部分结构,在对电机约束、电池SOC、ECE法规等主要影响因素进行充分考虑的基础上完成了再生制动能量回收控制策略的制定,按固定比例分配前后轮制动力,根据所设计的模糊控制逻辑分配和修正电液制动力,达到最大化回收制动能量的目标。
2.1 制动系统结构设计
本文重新设计液压制动系统部分结构时,保留了原车自带的制动操作机构,将回路控制阀和高压蓄能器加装于主缸与轮缸间,控制阀在汽车采用纯电机制动模式时处于关闭状态,此时在高压蓄能器中储存高压液体(来自主缸);回路控制阀在车辆进入纯液压制动模式时处于开启状态,主缸的高压液体流入轮缸完成液压制动;轮毂电机在机电复合制动模式情况下(此时控制阀关闭)会优先提供制动力,主缸液体向高压蓄能器流入;在电机制动发生故障或最大制动力无法满足制动需求的情况下,开启回路控制阀使液压制动力由高压蓄能器完成快速建立,此时液压制动系统辅助制动。考虑到机电复合制动开始阶段在本文设计方法下会出现无法降低液压制动力的情况,采用电机制动替换原车ABS中的液压制动完成力矩的实时调节,根据预设的滑移率上下限比较判断实时滑移率,不满足设定要求时通过调节电机制动力矩(增加或减小5%)实现对制动力需求的调节,直至车速低于设定车速,从而实现机电复合制动防抱死控制[2]。
2.2 制动力分配
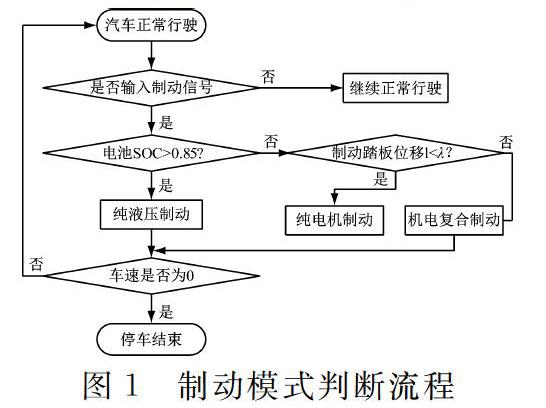
汽车制动模式判断流程,如图1所示。
在有制动信号输入且电池SOC值超过0.85的情况下进入纯液压制动模式(不进行电机制动),以有效避免电池过充(由回收制动能量导致)造成的损害;汽车在SOC值小于0.85且制动踏板位移设定值大于踏板位移的情况下(即进行低强度制动)则进入纯电机制动模式,由轮毂电机回收能量;若制动踏板位移设定值小于踏板位移(即进行较为快速的减速),则进入机电复合制动模式采取中高强度制动,液压制动系统和轮毂电机共同制动[3]。现有研究中采用的典型控制策略(用于对前后轮制动器制动力进行协调分配)主要包括按固定比例分配制动力、最优制动能量回收、并联制动能量回收、理想制动力分配4种,基于ECE制动法规的按固定比例分配制动力的控制策略能够最大化增加电机制动力比例,前轴制动力不超过ECE规定值,可按确定比例系数有效分配前后轴制动力(即按β曲线分配的原则),有效提高了制动能量的回收效率,本文选用了该分配控制策略,前后轮制动力分配曲线,如图2所示。
前轮的电机与液压制动力分别由Fmf和Fhf表示、后轮则分别由Fmr和Fhr表示,纯电机制动时按D点分配制动力,机电复合制动按E点分配制动力[4]。
3 模糊控制器的设计
目前电动汽车主要采用结合运用传统制动系统和反馈制动系统的制动方式,电动汽车制过程中的制动能量回收量取决于反馈制动系统质量,电动汽车制动过程在ADVISOR反馈制动模块中仅考虑了车速这一影响因素,即根据车速分配制动力,其制动力分配比例固定不变,属于静态控制策略,而动态变化的车速限制了分配过程科学准确性的有效提高,制动能量回收效率有待提高。为此本文提出了一种制动力分配模型,该模型基于模糊控制理论,可使制动能量回收效率得到显著提高。
3.1 模糊控制理论
模糊控制属于一种智能控制理论,控制系统动态模式的精确度对控制质量产生直接影响,但由于复杂的汽车制动系统存在较多的变量,增加了建立精确数学模型(针对多个变量)的难度,难以准确描述系统的动态过程。对于未知的数学模型模糊控制表现出了较大的优势,更适用于复杂的非线性系统控制,考虑到汽车制动过程中存在多个变量,可采用模糊控制方法控制制动过程,如图3所示。
模糊控制器主要包括模糊化(完成输入量的准确值到模糊语言变量值的转变,并将模糊概念通过隶属函数进行定量描述)、逻辑判断(作为模糊控制器的核心,利用知识库模拟人的推理能力,获取合适的控制量)、知识库(由实现控制目标的专家知识构成,主要分为用于存储模糊空间分级数、语言变量的隶属函数等的数据库和由IF-THEN形式的控制规则构成的规则库)及解模糊化4个环节[5]。
3.2 制动力模糊控制模型
本文控制策略的关键在于完成对所需制动力及分配比例的计算(利用模糊逻辑控制理论),实现控制策略的模糊化以适应复杂的高度非线性的汽车运行工况,控制策略通过模糊控制器FLC实现,如图4所示。
模糊控制器以速度、所需制动力、电池SoC作为输入信号(两两互为一组输入),以反馈制动力分配比例系数K作为输出,如表1所示。
各输入输出参数模糊集(很低、中低、低、中、高、中高、很高,分别为NL、ML、L、M、H、MH、NH)[6]。考虑到模糊控制理论具有一定的模糊性,对模糊控制策略需通过建立隶属度函数完成可行性的评估,建立模糊控制器时,隶属度函数是所使用到的各变量范围在[0,1]间的控制函数(如三角函数、梯形函数、高斯函数等),建立的隶属度函数时,对变化较快的车速需结合使用较高灵敏度的三角函数和梯形函数构建车速隶属度函数以及制动力需求隶属度函数进行控制。负责向汽车提供稳定能量的蓄电池的电量变化幅度较小,采用梯形函数构建。通过模糊规则获取车速、制动力需求、电池SoC及K的相互关系,车速为0时K也为0,此时只有机械制动。制动力需求随着车速的增加而增大,K随之不断上升。车速接近100km/h时所需的制动力较大,K超过60%,可有效回收制动能量。電池电量会随着车速及行驶距离的增加而不断减少,K值迅速增加,主要由反馈制动提供制动力。电池通过反馈制动充电后电量增加,K值会逐渐降低,此时反馈制动占比较少,以机械制动方式为主[7]。
4 实验仿真测试与结果分析
为测试本文所构建的模糊控制策略的有效性,选取ECE-EUDC循环工况进行仿真测试,仿真结果如图5—图7所示。
电动汽车在ECE-EUDC一个循环工况下行驶了约11km,电池SoC下降了0.21,出现负值的电机功率表示电机在进行反馈制动,实现能量的再生(处于发电工况的电机),验证了该模糊控制策略的可行性。将本文的模糊控制模型在NEDC、UDDS、FTP循环工况下同ADVISOR原有制动控制模型进行对比仿真实验,如表2所示。
3种工况下本文模糊控制策略的最大续驶里程更长,显示出了一定的优越性。蓄电池SoC值=电池剩余容量/总容量,可用于表示电池电量使用情况,3种循环工况下控制策略的仿真实验结果,如图8—图10所示。
本文模糊控制策略的电池SoC值更高,说明电动汽车采用本文模糊控制策略时在行驶过程中的电池电量消耗较慢,即制动能量的回收率较高,具有一定的实际应用价值[8]。
5 总结
再生制动能量的回收率成为衡量制动系统效能的重要指标,针对如何分配各制动力的比例,本文完成了一种复合再生制动系统及控制策略的设计,运用模糊控制理论进一步优化了反饋制动系统模型,使制动能量的回收效率得到有效提高。针对ECE-EDUC循环工况的仿真实验结果验证了该模糊控制策略的可行性,在NEDC、UDDS、FTP循环工况下同原有制动力控制模型的对比仿真实验验证了本文模糊控制策略的优越性,有效提高了制动过程能量回收效率,进而增加汽车的续航里程。
参考文献
[1] 柏凯,刘世达.基于ADVISOR电动汽车动力性仿真分析[J]. 农业装备与车辆工程, 2017(2):74-77.
[2] 胡均平,冯东昱,李科军. 混合动力汽车动力系统优化建模仿真研究[J].计算机仿真, 2017(1):143-147.
[3] 金鑫君,罗方赞,郑丽辉,等.基于ADVISOR纯电动汽车动力系统参数匹配优化研究[J]. 机械工程师, 2017(10):96-98.
[4] L I Silva,A Bouscayrol,C H De Angelo,et al. Coupling Bond Graph and Energetic Macroscopic Representation for Electric Vehicle Simulation[J]. Mechatronics, 2016(12):906-913.
[5] Ricardo Maia,Marco Silva,Rui Araújo,et al.Electrical vehicle modeling: A fuzzy logic model for regenerative braking[J]. Expert Systems With Applications, 2016 (7):8504-8519.
[6] 许世维,马建,汪贵平,等.基于制动意图识别的增程式重型商用车复合制动控制策略[J]. 中国公路学报, 2017(4):140-151.
[7] 刘志强,汪浩磊,杜荣华. 考虑参数灵敏度的电动汽车回馈制动模糊控制[J].中南大学学报(自然科学版), 2016(11):3700-3706.
[8] 杜荣华,米思雨,胡林,等.分布式驱动电动汽车复合制动系统转矩分配控制策略仿真[J]. 汽车工程, 2019(3):327-333.
(收稿日期: 2020.02.25)
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
科技传播(2016年19期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
企业导报(2016年19期)2016-11-05
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
出版广角(2016年4期)2016-04-20
