
基于多特征多分类器的海面舰船目标识别技术∗
2020-10-10 02:44:18
舰船电子工程 2020年8期
(海军航空大学 烟台 264001)
1 引言
雷达高分辨距离像(High Resolution Range Profile,HRRP)提供了目标散射点沿距离方向的分布情况,是目标重要的结构特征[1~2]。舰船目标的结构与其强散射点分布息息相关,因此,舰船目标HRRP包含的丰富信息可为海面目标特征提取与识别提供有效支撑[3]。
面对日益复杂和严峻的陆海空天战场环境,雷达系统的性能成为制约其突防能力的关键因素。为了有效检验雷达系统探测、跟踪、识别并精确打击目标的能力,需要大量的回波数据来验证和支持雷达参数设计以及信号处理算法。虽然外场构建的现实场景比较逼真,但协调保障困难,获得实测数据难度较大,且很难有效代表各种典型情况。而实验室内场模拟出来的电磁环境具有设置灵活、可反复试验的优点,但如何在内场建立雷达信号传输和目标散射特性的模型,构造贴近实战要求、具有较高可信度的陆海空天战场环境,从而产生逼真的雷达回波信号是迫切需要解决的一个难题。
为此提出开展雷达系统电磁场景模拟计算技术的研究工作,分析高分辨距离像的特性,研究新的特征提取方法、辅助雷达系统方案设计和制定目标识别方案等。
2 目标HRRP多特征提取技术
着眼于提高目标分类识别的性能,筛选出识别率高的良好特征,使得所提取的特征能够反映不同目标间的差异并有利于提高识别率,进而构建特征子集是一项十分重要的研究内容[4~5]。
因此,提取的特征将尽可能反映目标物理散射结构特性,既考虑类间可分性,又考虑类内相似性。主要从结构特征提取与变换域特征提取两个方面获取目标HRRP特征,可分性较高且冗余度低的特征可用于后续目标分类与识别。
2.1 结构特征提取
舰船目标第m次HRRP实样本可表示为

通过对式(1)表示时域特征,可以获得目标的强散射点分布情况和尺寸信息等结构特征。在识别时主要考虑以下直观结构特征:尺度特征、散射重心[6]、目标强散射中心数目[7]、强散射中心间距离、强散射中心最远距离、散射中心分布熵、散射中心分布的离散程度[8]、高阶中心矩特征和频域特征。
1)尺度特征
该特征直观地反映了目标的长度特征,首先通过对目标进行角度估计,然后用超过门限(经仿真实测等多次量测后设定)的距离单元数除以估计角度的余弦即可获取尺度特征。
2)散射重心
在统计学理论中,重心是衡量样本形态偏斜程度的统计量,设{x()n,n=1,2,...,N}为距离像,N为距离单元数。则距离像的散射重心可表示为

3)目标强散射中心数目
该特征是指距离像轮廓中峰值的数目,可以通过峰值搜索算法和阈值判决等方法获得。
4)强散射中心间距
强散射中心间距主要指的时两个最强散射中心距离。
5)强散射中心最远距离
强散射中心最远距离指的是最强散射中心距目标最前端的距离,强散射中心间距和强散射中心最远距离二者主要反映了目标强散射中心距离位置之间的对应关系。
6)散射中心分布熵
借用熵的定义,可用一维像的幅值代替熵函数中的概率值,从而得到一维像的熵特征,熵值大小可以反映散射中心分布的集中情况。
记N个强散射中心为P=[pm1,pm2,…,pmi,…,pmN-1,pmN]T,其中,pmi为HRRP序列中第i个强散射中心的幅值;下标mi为散射中心对应的单元序号,则散射中心分布熵(EA)定义为
EA反映了目标强散射中心幅值之间差异大小。
7)散射中心分布的离散程度
散射中心分布的离散程度(EP)定义为
式中,超过阈值的第一个和最后一个点分别记为n1和n2。EP值反映了强散射中心分布的离散程度。
2.2 变换域特征提取
变换域特征维度小,区分性更强,可以通过对舰船目标HRRP进行适当变换,挖掘变换域特征。重点考虑以下变换域特征:高阶中心矩特征和频域特征。
1)高阶中心矩特征[9~12]
设距离像表示为{x(n),n=1,2,...,N},其中N代表距离单元数,则归一化距离像可表示为


其中,n0表示归一化距离像的散射重心。
中心矩特征表示如下:
其中,pmax代表中心矩的最高阶数。由于二阶矩及高阶矩具有平移不变性,因此主要考察2~pmax范围。
2)频域特征[13]
时间连续的实信号xT={x(t),t∈T},其功率谱可表示为

其中,X(ω)表示xT的频谱函数。
因为信号xτ(t)=x(t-τ)的频谱函数为Xr(ω)=e-jωτX(ω),则有:

由上述分析可知,频域特征信息具有以下特点[14]:傅里叶变换是一个信息保持变换,将HRRP从时域变换到频域过程中信息没有损失;从频域中可能获得时域中不可见的距离像统计特性,合理利用这些统计特性作为判别信息,有助于改善识别性能。
提取的结构特征和变换域特征具有一定的信息互补性。实际上,除上述特征外,还可考察评估诸如偏度、峰度等更多的特征,充分发掘一维像的物理散射特性。
以CVN65为例,方位角为166°,俯仰角为45°下的原始距离像如图1所示。
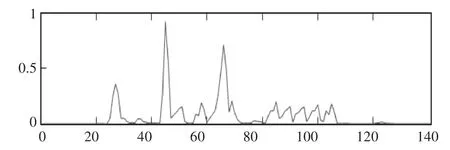
图1 CVN65方位角166°,俯仰角为45°下的原始距离像
功率像如图2所示。
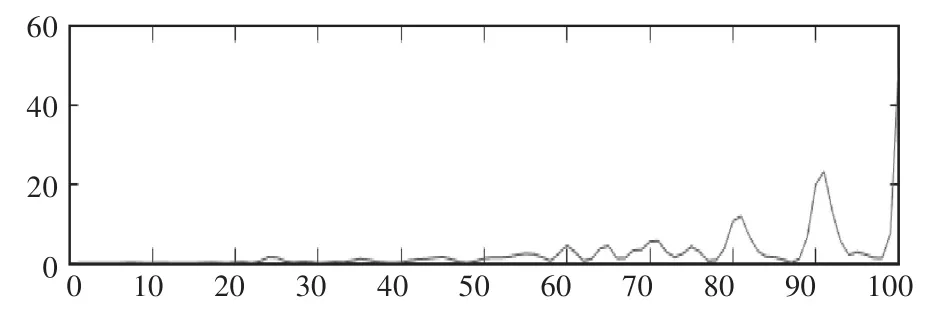
图2 CVN65方位角166°,俯仰角为45°下的功率像
中心矩特征如图3所示。

图3 CVN65方位角166°,俯仰角为45°下的中心矩特征
结构轮廓特征如图4所示。

图4 CVN65方位角166°,俯仰角为45°下的结构轮廓特征
3 分类和识别总体方案
根据上述讨论,分类与识别总体方案框图如图5所示。
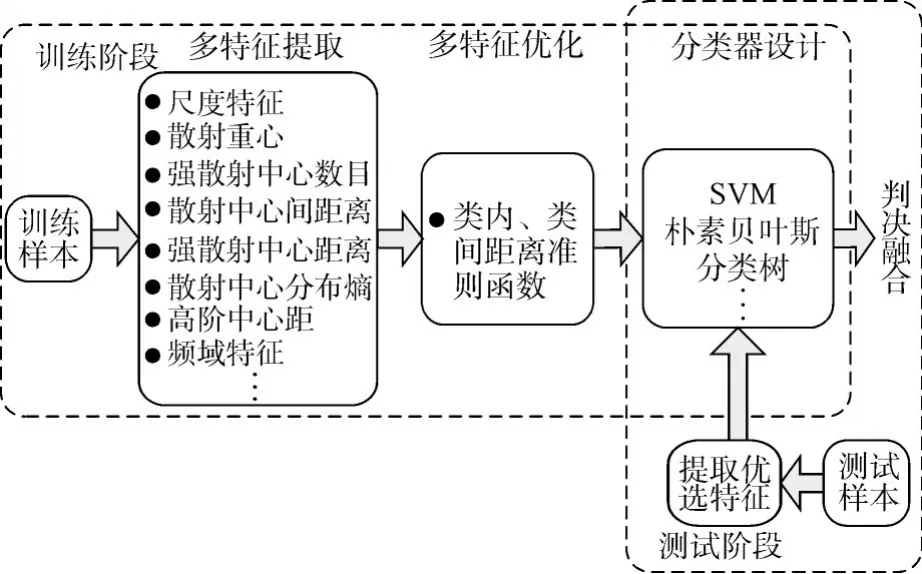
图5 分类与识别技术总体方案图
首先,利用第2节中HRRP多特征提取技术提出的方法提取目标HRRP的结构特征、变换域特征等多种特征;然后,选择类内、类间距离准则函数特征评估方法,优选出可分性较高且冗余度低的特征;最后,根据优选后的特征,根据 SVM[15~18]、朴素贝叶斯[19]和分类树[20~21]等分类器完成对目标的识别。
4 实验与分析
4.1 仿真实验数据说明
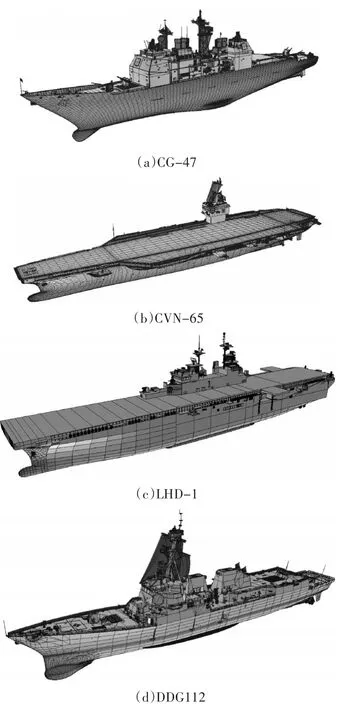
图6 四型典型舰船目标模型
研究用的数据来自于国外某雷达目标散射仿真软件,仿真用四型舰船目标模型示意图如图6所示。计算了CG47(长172.8m,宽16.8m,高6.5m)、CVN-65(长342.3m,宽40.8m,高11.9m)、LHD-1(长257.2m,宽33.5m,高8.2m)和DDG112(长155m,宽18m,高9.4m)共4类舰船目标的转台数据。选用雷达中心频率10GHz,带宽80MHz。数据产生选用全方位数据,方位角范围为 0°~360°,间隔1°,俯仰角为 45°。
4.2 仿真分析
基于多特征多分类器的目标HRRP分别与识别技术总体方案如图7所示。
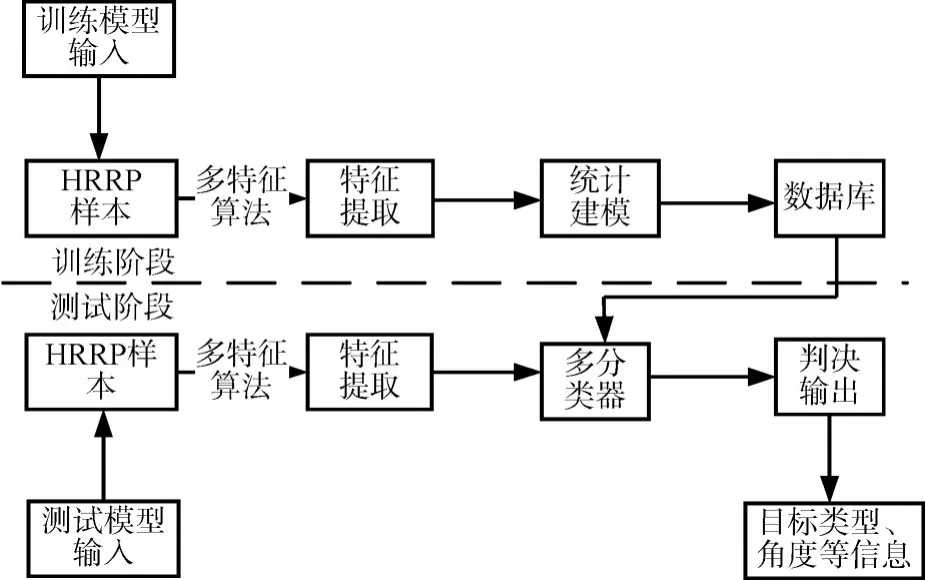
图7 识别技术总体方案
整体流程分为训练模块与识别模块,训练模块部分先输入整个目标模型,例如舰船类目标,对模型按照不同方位角和俯仰角生成识别用的目标数据库;识别模块输入待识别的模型,按照所提算法和训练模块中的目标数据库进行识别,最后输出识别的结果和目标对应的方位角信息。
特征提取部分采用的是第2节中提出的目标HRRP多特征提取技术,识别用的特征可以根据实际需求进行选择性使用。模型输入提供对应的接口,当外部输入新的模型时,经过对模型的前期处理后可直接导入进行计算对应特征生成相关数据库。同时在数据输入部分预留实测数据接口,可方便将实测数据进行识别以验证模型的有效性。
具体的识别方法如下:
1)训练阶段
步骤1:对训练数据进行能量归一化、分帧等预处理;
步骤2:采用第2节中多特征提取技术提取目标的时频域特征;
步骤3:利用类内、类间距离准则函数优选出待识别的特征;
步骤4:记录好目标提取的特征信息并保存,建立训练模板库。
2)测试阶段
步骤1:对测试样本进行能量归一化、分帧等预处理;
步骤2:采用第2节中多特征提取技术分别提取目标优选后的对应特征;
步骤3:利用多分类器完成对测试样本的分类。
分类器包括:支持向量机、分类树、判别式、朴素贝叶斯、K最近邻。不同特征在不同分类器下的训练验证误差如表1所示。
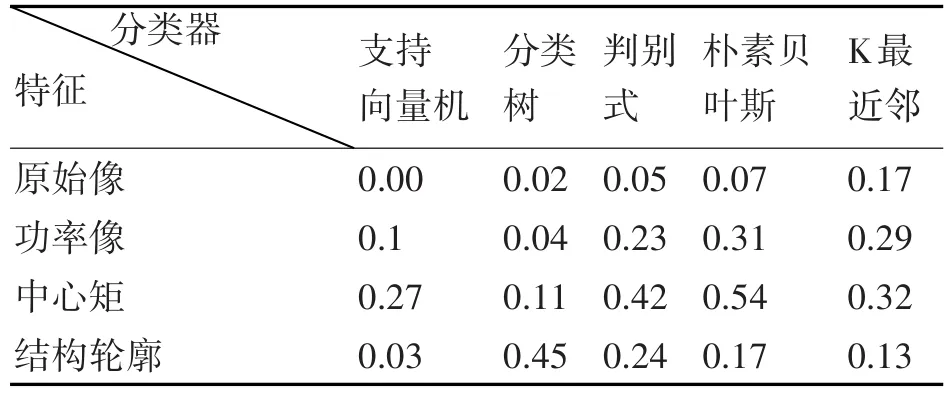
表1 训练验证误差
从表1可知,当特征选择为原始像,分类器采用支持向量机时,训练误差最小,为0。总体而言采用支持向量机训练误差相对较小,采用朴素贝叶斯训练误差相对较大。而选用特征原始像训练误差相对较小,中心矩训练误差相对较大。
交叉检验误差(Cross-validation error,CVE)如表2所示。
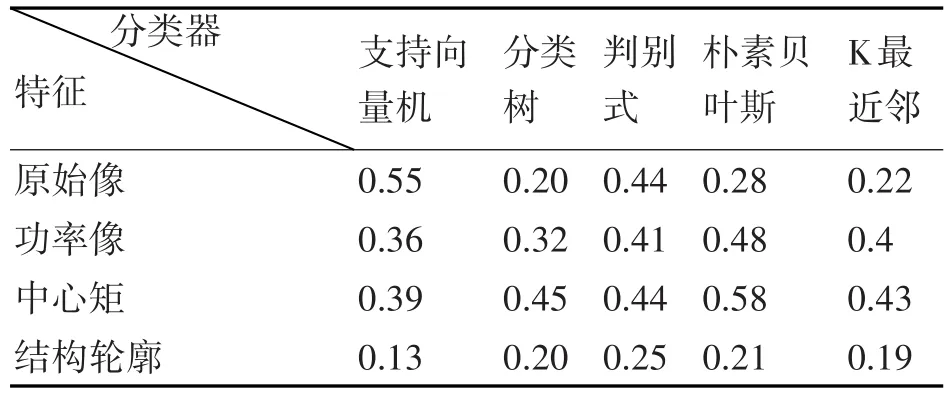
表2 交叉验证误差
从表2可知,当特征选择为结构轮廓,分类器采用支持向量机时交叉验证误差最小,为0.13。总体而言,采用分类树交叉验证误差相对较小,采用朴素贝叶斯交叉验证误相对较大。而选用特征结构轮廓特征交叉验证误相对较小,中心矩交叉验证误相对较大。
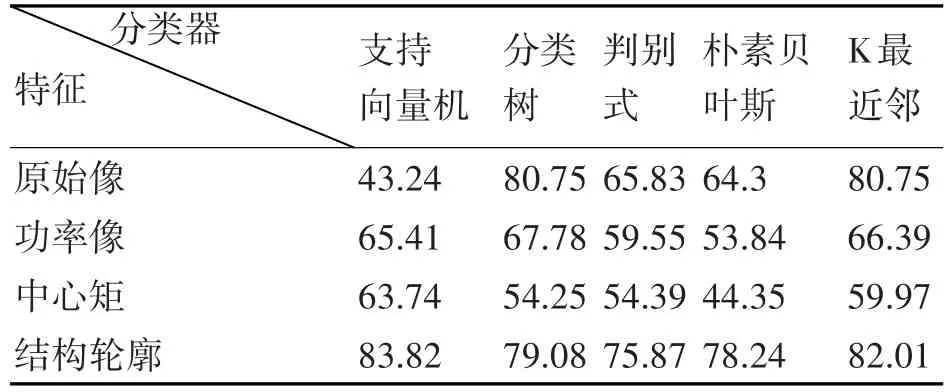
表3 四种典型舰船平均识别率
四种典型舰船平均识别率如表3所示。
从表3可知,当特征选择为结构轮廓,分类器采用支持向量机时四种舰船的平均识别率最高,为83.82%,这和表2交叉验证误差所示的结果是对应的。总体而言,特征选择结构轮廓,识别率较高,五种分类器下的平均识别率为79.80%。综上所述,对典型舰船目标HRRP进行识别时建议选用结构轮廓特征,采用支持向量机作为分类器,这样的识别率更高。需要说明的是训练时选用的样本是全数据库的奇数列样本采样,测试样本则是数据库中剩下的样本,增加训练样本数能进一步提高识别率,通常情况下数据库样本越全识别效果也就越好,分类器的鲁棒性也就越高。因此,在实测数据库建立时应尽可能多搜集相关数据。
5 结语
基于四种典型舰船目标高分辨一维距离像回波,对特征的提取进行了探讨,分别提取了时域和变换域的特征。通过理论分析与仿真实验的方式,利用分类树、朴素贝叶斯和SVM等典型分类器对不同特征进行了识别,验证了不同分类器下使用不同特征进行目标识别的性能,通过选择分类器和基于一维距离像提取的特征,可以有效改善识别性能。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
舰船科学技术(2021年12期)2021-03-29 01:28:44
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
电子制作(2018年19期)2018-11-14 02:37:08
中国交通信息化(2018年3期)2018-06-13 03:27:58
自动化学报(2017年11期)2017-04-04 02:52:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
舰船科学技术(2016年1期)2016-02-27 15:39:26
噪声与振动控制(2015年4期)2015-01-01 07:08:21
