
无人机载高光谱仪在八里湖水质监测中的应用研究
2020-09-29 06:41常婧婕邓燕青陈斯芝殷晓杰
水利科技与经济 2020年9期
常婧婕,邓燕青,陈斯芝,殷晓杰,蔡 倩
(1.江西省水文局,南昌 330001; 2.南昌市水文局,南昌 330001; 3.九江市水文局,江西 九江 332000)
1 概 述
无人驾驶飞机简称无人机,英文缩写为UAV,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机涉及传感器技术、通信技术、信息处理技术、智能控制技术以及航空动力推进技术等。
高光谱遥感是在电磁波谱的紫外、可见光、近红外、中红外和热红外波段范围内,获取许多非常窄且光谱连续的影像数据的技术,是在传统的二维遥感的基础上增加了光谱维,形成的一种独特的三维遥感[1]。不同的物体会表现出不同的光谱反射和辐射特征,运用具有高光谱分辨率的仪器,通过获取图像上任何一个像元或像元组合所反映的物质的光谱特性,经过后续数据处理,就能达到快速区分和识别物质的目的。
高光谱遥感的成像光谱仪具有光谱分辨率高、光谱范围宽的显著特点,可以分离成几十甚至数百个很窄的波段来接收信息,所有波段排列在一起能形成一条连续的、完整的光谱曲线。高光谱遥感技术已广泛应用到环境监测、资源调查、工程建设等各个领域。矿产资源勘探、岩石矿物识别和填图等一直是高光谱技术发展和应用的主要方向[2]。高光谱遥感凭借其高光谱分辨率的优势,在植被研究中的应用已从植被遥感扩大到生态意义方面[3]。
无人机载高光谱遥感技术因其灵活机动的特点在近海及小范围的水质监测中发挥了重要作用,水质监测近些年成为无人机高光谱成像设备的应用研究热点领域之一。
本文利用无人机搭载的高光谱成像设备完成水体光谱数据的采集,并对比分析采集的光谱数据和实验室检测数据,通过定量模型估测水质参数浓度,为后续该技术在水质监测中的应用推广提供数据支持。
2 研究方法
2.1 研究区概况
八里湖位于九江市区西部,涉及九江市浔阳区、濂溪区和柴桑区。湖区地理位置处于E115°53.4′-E115°57.2′、N29°37.6′-N29°42.2′之间。流域东邻鄱阳湖,南毗博阳河,西靠赛城湖,北毗长江。湖区主要承接庐山西北面沙河、十里水等支流坡面汇流,总集水面积273 km2。湖区南北长、东西窄,呈不规则分布,岸线总长29 km。
2.2 数据获取
机载高光谱监测范围为八里湖十里河入湖口处附近水域。测区位于九江市八里湖东侧(29°41′21.82″N 115°57′20.88″E),为长宽均约1 km左右的不规则区域,面积约0.86 km2(图1红框内)。共计利用机载高光谱设备,飞行3架次,完成测区内湖面的高光谱数据采集。同时,对同片水域均匀布设水质断面,采样点布设见图1,分析参数包括叶绿素a、悬浮物、总氮、总磷。
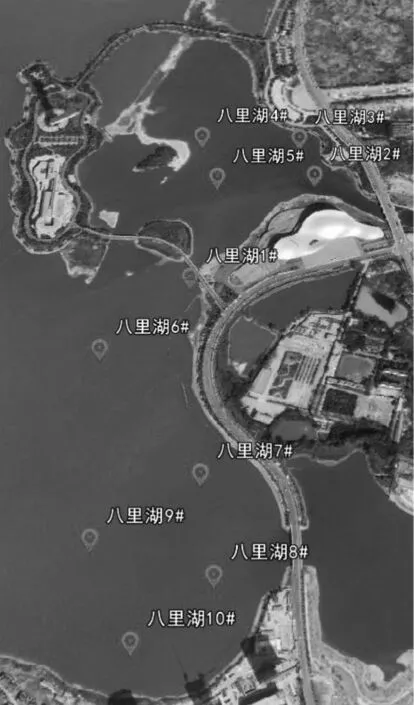
图1 采样点布设图
3 结果与分析
3.1 高光谱遥感数据处理
水体中的各个重要光学成分浓度发生变化时,必将引起水体光学性质的变化,主要表现为水体的吸收和散射特性的变化,进而导致水体离水反射率的变化,如悬浮物在可见光波段反射率与浓度显著呈正相关。造成水体反射率变化的主要原因是水体中各种物质的浓度存在差异,根据水体的反射率等光学信息与相应物质的浓度之间的特定关系,可以建立相应的模型算法,对水体中叶绿素、悬浮物等各种指标的浓度和分布等信息进行反演。
3.2 叶绿素a高光谱数据分析
叶绿素a浓度分布范围0.017~0.067 mg/L,主要分布在0.02~0.04 mg/L之间,水体富营养化明显。见图2。
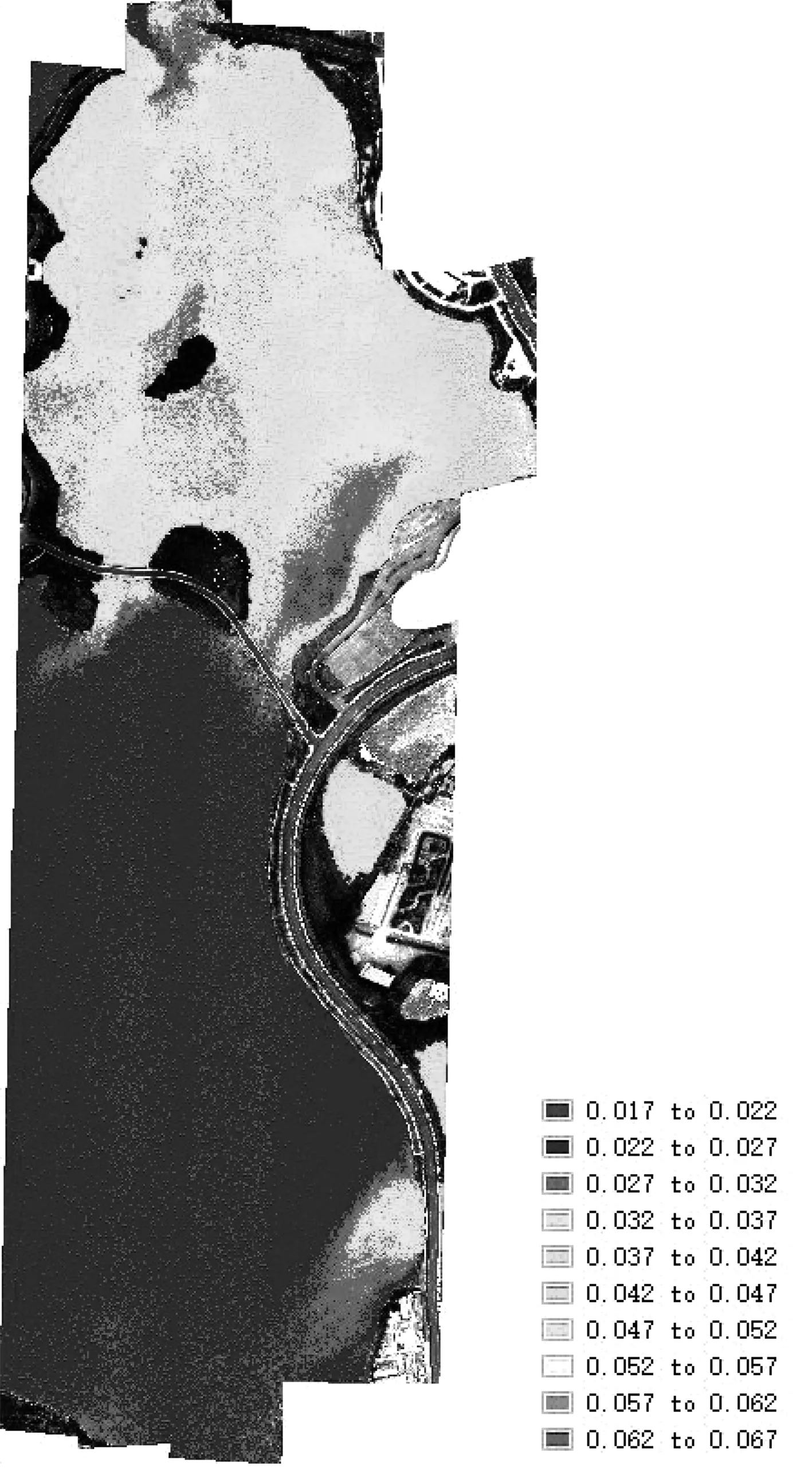
图2 无人机航飞高光谱影像图和叶绿素a浓度空间分布图
3.3 总氮高光谱数据分析
总氮浓度分布范围1.45~2.5 mg/L,主要分布在1.66~1.975 mg/L之间,表现为IV-劣V类水之间,水体富营养化明显。见图3。

图3 无人机航飞高光谱影像图和总氮浓度空间分布图
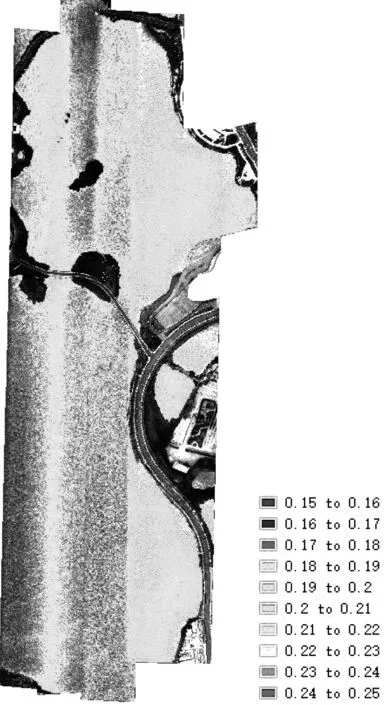
图4 无人机航飞高光谱影像图和总磷浓度空间分布图
3.4 总磷高光谱数据分析
总磷浓度分布范围0.15~0.25 mg/L,主要分布在0.17~0.21 mg/L之间,表现为IV-劣V类水之间,水体富营养化明显。见图4。
3.5 悬浮物高光谱数据分析
悬浮物浓度分布范围0~25 mg/L,主要分布在5~12.5 mg/L之间,水体透明度较高。见图5。

图5 无人机航飞高光谱影像图和悬浮物浓度空间分布图
3.6 水质参数遥感反演验证
在无人机高光谱遥感水质飞行采集的同时,对同片水域进行了水质采样分析。通过高光谱水质遥感技术,反演了相应指标的浓度值,依据位点的经纬度坐标,对相同位点的指标数值进行了提取,各点位的测定值和反演值见表1。
通过偏差分析表明,各位点的指标值平均偏差控制在20%以内,偏差分析结果表明差异在可控范围。见表2。
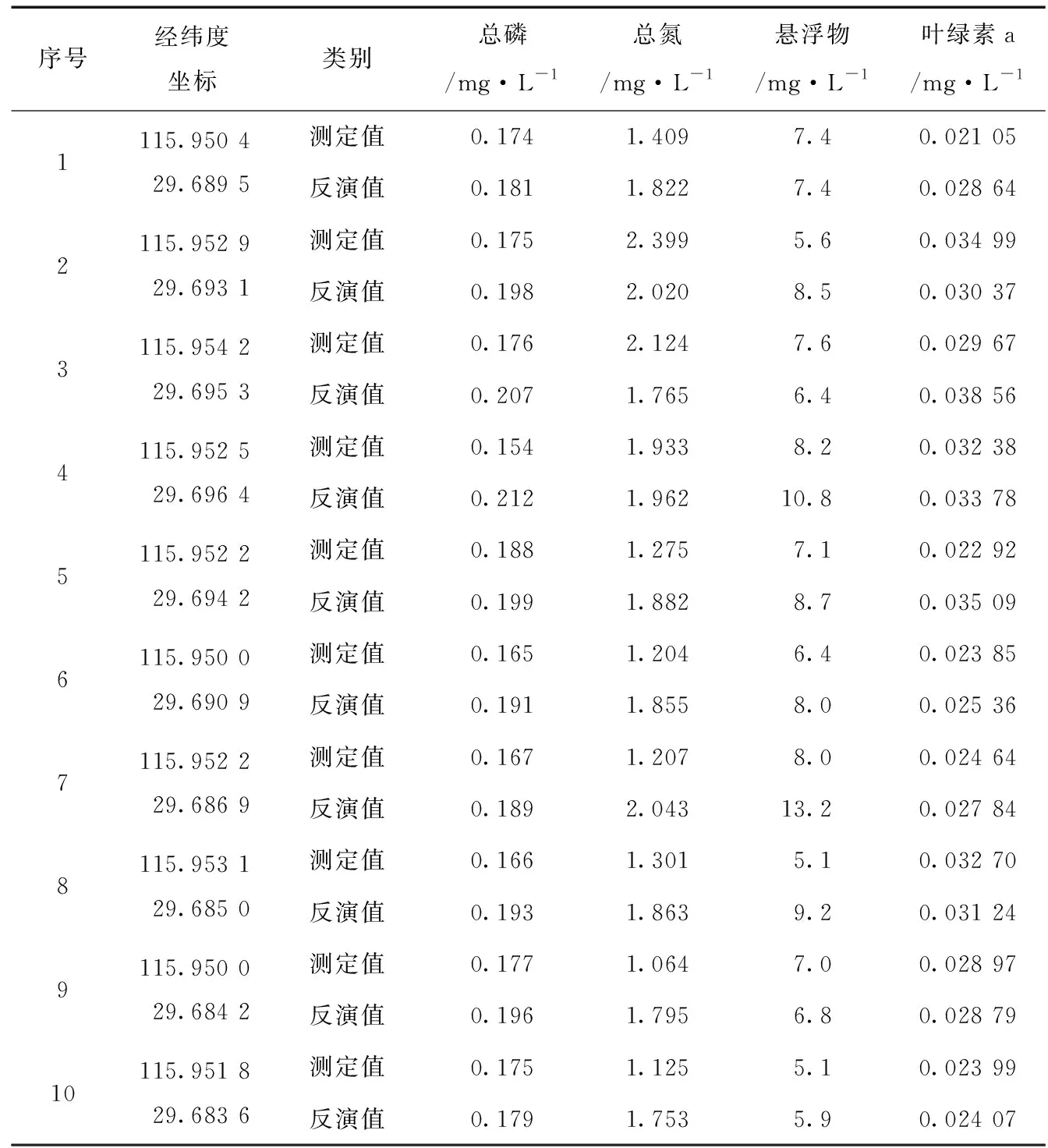
表1 原位采样点水质参数国标法测定值与遥感反演值
4 结 论
1) 实现监测数据对比精准化。通过实验室检测数据对遥感反演经验模型进行的验证可见,模型各指标偏差在可控范围内。将无人机载高光谱反演结果和水质常规检测结果比对,水质类别评价一致性较高,高达80%。总磷和总氮数据保持一致性为90%,体现了在湖泊Ⅳ-Ⅴ类水数值范围内的一致性。叶绿素a和悬浮物的高光谱结果和实验室检测结果都有非常高的一致性。叶绿素a两者的平均浓度值之差只有2.8 ug/L,
达到了国标检测方法中的高浓度(>20 ug/L)标准偏差的水平(1.35~2.79 ug/L),悬浮物两者的平均浓度值之差只有1.69 mg/L,低于文献报道的水质悬浮物测定的扩展不确定度(2 mg/L)[4]。
2) 实现数据获取的多元化。不仅能够获取模型反演得到的水质数据,还能得到高清化遥感影像,且分辨率较高。除了水质数据结果,更能够直观感受查看水域状况。
3) 实现测定指标梯度的可视化。能够较好地测定各水质指标的浓度以及浓度梯度空间分布图,并形成可视化地图。
4) 实现监测大范围的机动化。相较于传统水质监测手段,本文所研究的无人机载高光谱仪通过模型得到各参数的数据,省掉了繁琐的野外采样及实验检测过程,具有更省时、省力、快速、监测范围广等优点,能够及时地监测水域的最新水质状况。
猜你喜欢
化工管理(2022年14期)2022-12-02
中等数学(2022年5期)2022-08-29
能源工程(2021年6期)2022-01-06
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
区域治理(2021年7期)2021-01-02
阅读(科学探秘)(2020年8期)2020-11-06
中等数学(2020年2期)2020-08-24
绿色科技(2019年2期)2019-05-21
中国果业信息(2019年1期)2019-01-05
