
具有外扰和不确定项的分数阶非线性混沌系统的自适应滑模同步
2020-09-27 12:56:58毛北行王东晓
吉林大学学报(理学版) 2020年5期
毛北行, 王东晓
(郑州航空工业管理学院 数学学院, 郑州 450015)
目前, 混沌同步已引起人们广泛关注[1-4], 用滑模方法研究混沌同步得到了广泛应用并取得了大量成果[5-8], 如文献[9]研究了不确定非线性动力系统的滑模同步问题; 文献[10]研究了Newton-Leipnik混沌系统的滑模同步, 给出了滑模同步方案; 文献[11]通过设计分数阶滑模控制器研究了非线性混沌系统的同步问题; 文献[12]研究了超混沌Bao系统自适应滑模同步. 由于实际系统均可用分数阶微分方程建立数学模型且更符合模型特点, 因此该方面的研究备受关注. 如文献[13]研究了分数阶Victor-Carmen混沌系统自适应滑模同步, 给出了滑模函数和控制器的构造与设计; 文献[14]根据积分比例滑模方法研究了超混沌分数阶Bao系统的同步; 文献[15]研究了一类分数阶四维动力系统的比例积分滑模同步4种方法; 文献[16]研究了分数阶不确定Victor-Caremn混沌系统的自适应滑模同步; 文献[17-18]研究了不确定混沌系统的有限时间同步. 此外, 系统建模时需考虑外扰和不确定性因素的影响, 分数阶非线性混沌系统的同步问题是非线性混沌学科研究的重点和难点, 利用自适应滑模研究方法处理分数阶非线性混沌系统的同步问题目前文献报道较少. 基于此, 本文给出滑模函数和控制器的构造及自适应规则, 得到分数阶非线性混沌系统自适应滑模同步的充分条件, 将相同阶的相关结论推广到不同阶情形, 并用MATLAB进行数值仿真验证.
1 主要结果
定义1[19]Caputo分数阶导数定义为

1.1 相同阶系统的同步
主系统设计为

(1)
从系统设计为

(2)
定义e(t)=y(t)-x(t), 将式(1)和式(2)相减可得方程

(3)
假设1|di(t)|<γi, |Δgi(y,t)|<βi, 其中γi,βi>0.
引理1[19]若x(t)为连续可微函数, 则对任意的t≥0, 有



定理1在假设1条件下, 设计滑模函数
其中ki>0, 控制器

不在滑模面上时, 构造函数
根据引理1, 求分数阶导数得
利用引理2得si→0⟹ei→0.
1.2 不同阶系统的同步
下面考虑不等阶系统, 以系统(1)为主系统, 设计从系统为

(4)

假设2|di(t)|<γi, |Δgi(y,t)|<βi, 其中γi,βi>0.


定理2的证明与定理1类似, 故略.
2 数值仿真
设计主系统为
(5)
当a=0.9,b=0.1,c=1.5,d=0.2,k=0.17,α=0.8时, 系统出现奇怪吸引子, 如图1所示.
设计定理1中的从系统为

(6)
定义误差e1=x1-x,e2=y1-y,e3=z1-z,e4=w1-w, 可得

(7)
(x(0),y(0),z(0),w(0))=(2.2,6.5,2.5,1.5),
(x1(0),y1(0),z1(0),w1(0))=(3,4,3,4.5),
Δf1(y)+d1(t)=0.1sin(t)x1+0.1cos(t),
Δf2(y)+d2(t)=-0.1cos(t)y1+0.1cos(t),
Δf3(y)+d3(t)=-0.1sin(t)z1+0.1cos(2t),
Δf4(y)+d4(t)=0.1cos(t)w1+0.1sin(t),
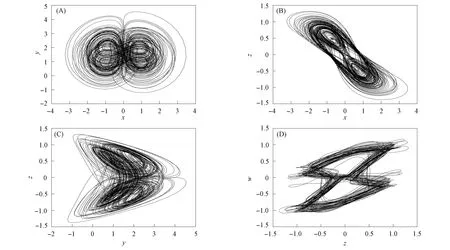
图1 系统吸引子的相图Fig.1 Phase diagram of system attractor
设计定理2中的从系统为
其中:
u1=u11+u12;u2=u21+u22;u3=u31+u32;u4=u41+u42;
定理1和定理2的系统误差分别如图2和图3所示. 由图2和图3可见: 初始时两个定理对应的系统误差相距原点较远, 相差较大, 随着时间的变动, 系统误差逐渐向原点趋近, 趋于一致; 定理1中等阶系统的误差较大, 不等阶系统的误差相差较小, 且不等阶系统误差趋近于原点的时间较短, 从而体现出分数阶微积分的优点, 因此分数阶系统建模更符合实际情况.
综上, 本文研究了不确定分数阶非线性混沌系统的自适应滑模同步, 给出了滑模函数和控制器的构造及自适应规则. 结果表明, 设计适当的滑模函数, 在控制器和自适应规则下, 分数阶非线性混沌系统是自适应滑模同步的, 将相同阶的相关结论推广到不同阶情形, 用四维超混沌金融系统检验了结论的正确性.

图2 定理1的系统误差Fig.2 System errors of theorem 1
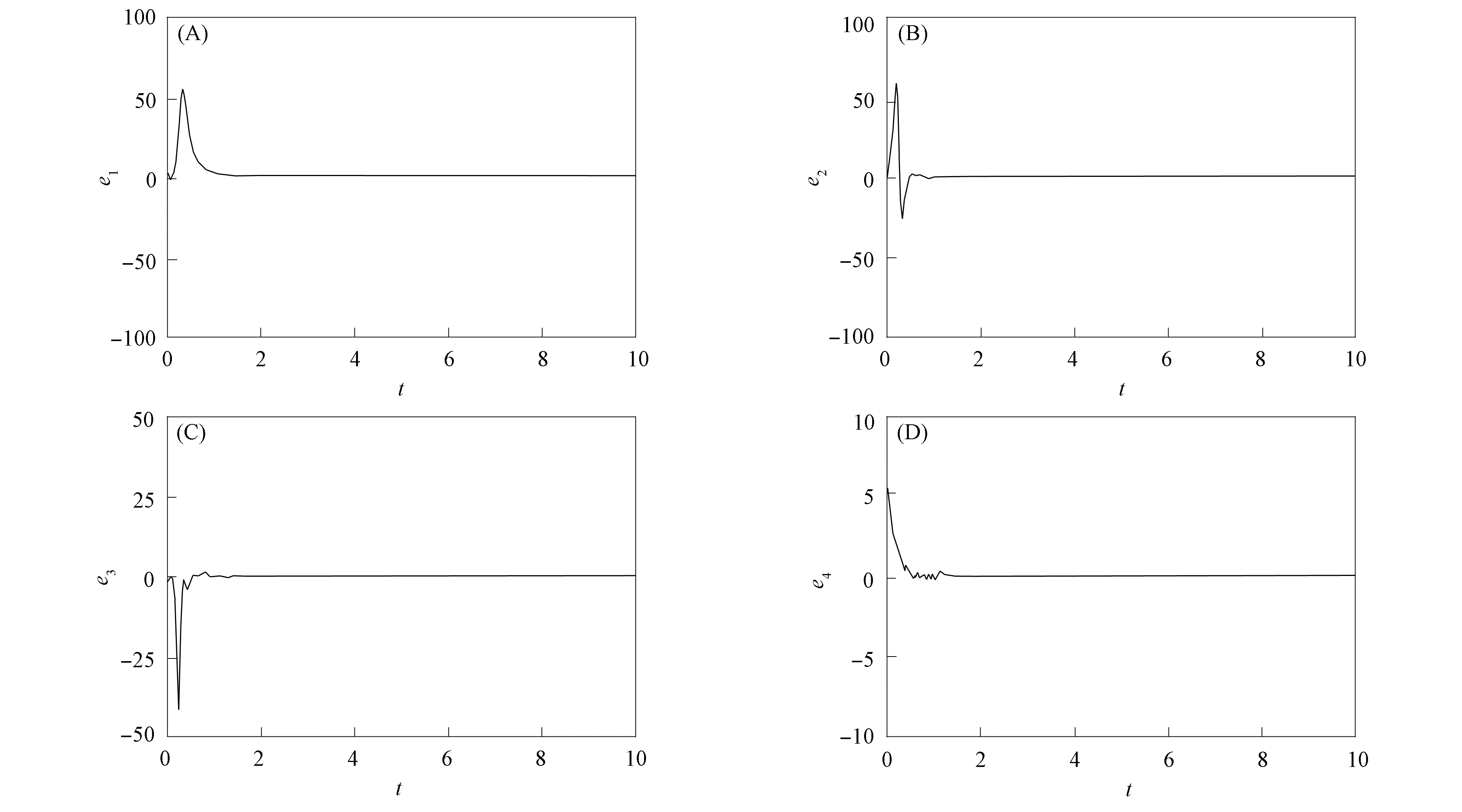
图3 定理2的系统误差Fig.3 System errors of theorem 2
猜你喜欢
中等数学(2022年6期)2022-08-29 06:15:08
校园英语·上旬(2019年6期)2019-10-09 04:08:57
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:45:57
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
装备环境工程(2015年5期)2015-02-28 01:20:35
