
基于GNSS的铁路通信铁塔变形监测方法
2020-09-27 01:19:58封博卿贺晗李聪旭杨峰雁孙国庆
铁道建筑 2020年9期
封博卿 贺晗 李聪旭 杨峰雁 孙国庆
(1.中国铁道科学研究院研究生部,北京 100081;2.中国铁道科学研究院集团有限公司电子计算技术研究所,北京 100081;3.京沪高速铁路股份有限公司,北京 100038)
在高速铁路沿线布设了大量用于铁路内部无线通信的基础设施。为了保证通信的连通质量和覆盖范围,通信设备的大部分硬件都布设在离线路不远的铁塔上,而通信铁塔受环境、天气(如强风)等因素影响,容易产生变形。铁塔的变形会对通信设备的正常使用、周边铁路及居民的安全造成威胁,因此对通信铁塔进行变形监测,对其安全运营具有重要意义。
当前通信铁塔变形监测方法有3 种:①监测多对点位的距离差值。如基于有源射频识别(Radio Frequency Identification,RFID)方法,通过计算两两RFID标签发送的分时信号之间的相位差,计算关键点的坐标,通过与正常情况下的坐标进行比较,及时发现铁塔的变形程度[1-2]。这种方法需要在地面布设多个接收天线,信号易受到干扰。②监测倾角值。如采用倾斜角测量仪、惯性导航器件等设备直接获得铁塔相对于初始状态各方向上的角度变化量[3-4]。倾斜角测量仪只能测量到放置位置处沿1 个或2 个坐标轴的倾斜角变化,而惯性导航器件属于高精密仪器,价格过于昂贵,且不适宜24 h 放置在野外。③监测三维坐标。如基于GNSS(Global Navigation Satellite System,全球导航卫星系统)卫星导航技术,通过在铁塔一些部位放置GNSS 接收机,测量监测点位的变化来确定铁塔的变形量。该方法的优势在于不仅能监测到铁塔的倾斜角度,还能获取到铁塔的实际地理位置坐标,同时可以对铁塔的沉降进行监测。一些学者已经将实时动态载波相位差分技术(RTK,Real-time Kinematic)应用于铁塔的实时变形监测[5-8],但并未考虑到RTK 测量中存在的测量误差,如果不对误差进行处理,则监测精度无法得到保障。
本文针对RTK 实时测量技术在观测过程中可能包含粗差及偶然误差的情况,采用抗差M 估计抵抗测量中的粗差,采用卡尔曼滤波进行滤波平滑从而削弱偶然误差,提高测量结果的精度。
考虑到成本,在铁塔顶部布设2个GNSS接收机用于监测铁塔倾斜情况,在塔基处布设1个GNSS接收机用于监测铁塔的整体沉降及位移,如图1 所示。接收机接收周边基站播发的定位改正数据,实时获取2 个接收机高精度载波相位差分定位结果,解算得到2 个接收机的位置坐标,并将解算结果通过4G 通信网络实时回传至后台数据处理中心。为保证RTK 测量厘米级定位精度,采用单基站模式则移动站与基站之间距离不应超过15 km;采用基于连续运行参考站(Continuously Operating Reference Stations,CORS)的网络RTK 技术则移动站与基站之间距离可扩大到30 km[9]。
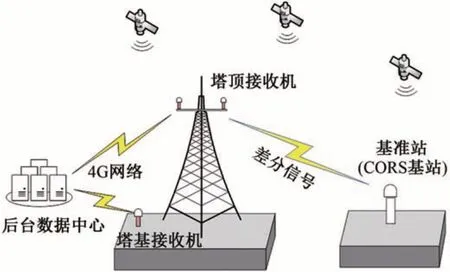
图1 塔顶接收机布设示意
1 抗差卡尔曼滤波
标准卡尔曼滤波要求观测向量为高斯白噪声序列,即内部不存在粗差。可是在现实应用中,GNSS 观测的数据受各方面影响总是会包含一定的粗差,导致动力学模型异常,最终使卡尔曼滤波严重偏离真值。为此可使用抗差M 估计算法剔除观测向量中的粗差[10-14]。
1.1 观测量的抗差处理
M 估计由 Huber 将其定义广义化[15],最终得到参数的M估计

式中:A为系数矩阵为等价权矩阵;L为观测值向量。
等价权矩阵可通过多种方法获得。由我国周江文教授提出的IGG 法[16],具有较好的抗粗差能力,且计算量小、易实现。本文采用这种方法求取等价权矩阵,权因子ω(v)为
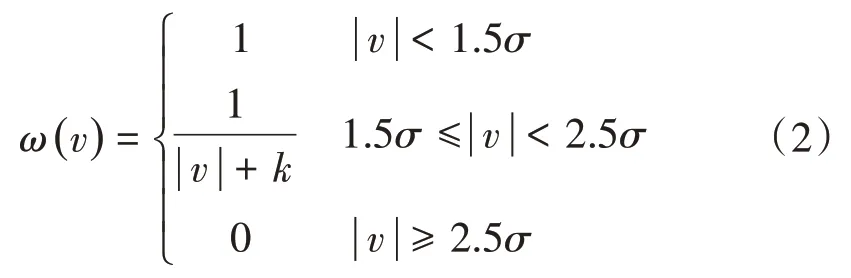
式中:v为观测值残差;k为选定的固定值;σ为观测中误差。
认为GNSS 各观测历元之间相互独立,等价权函数为

式中:Pi为各历元观测值的权值。
k值是一个微小量,只要在一定范围内则不会对最终的估计产生影响[17],这里取k=0.001。
选定一个微小量ε 进行迭代计算,直到第m次迭代 估 计 值与 第m-1 次 迭 代 估 计 值之 差 小于ε,即

则得到可靠的参数估计
考虑到监测过程中一个历元时刻没有多余观测,但认为铁塔变形值变化较为缓慢和稳定,所以本文取当前监测的沉降量及前后2 期沉降量共3 期数据进行抗差M估计作为当期沉降量。
1.2 抗差卡尔曼滤波模型建立
为使预测值与观测值之间的误差最小,可构造出状态参数的抗差卡尔曼滤波解,即

式中:Ak为系数矩阵为等价权矩阵;P-Xk为状态预测向量的权矩阵,取值为协方差矩阵的逆矩阵;Lk为观测值向量。
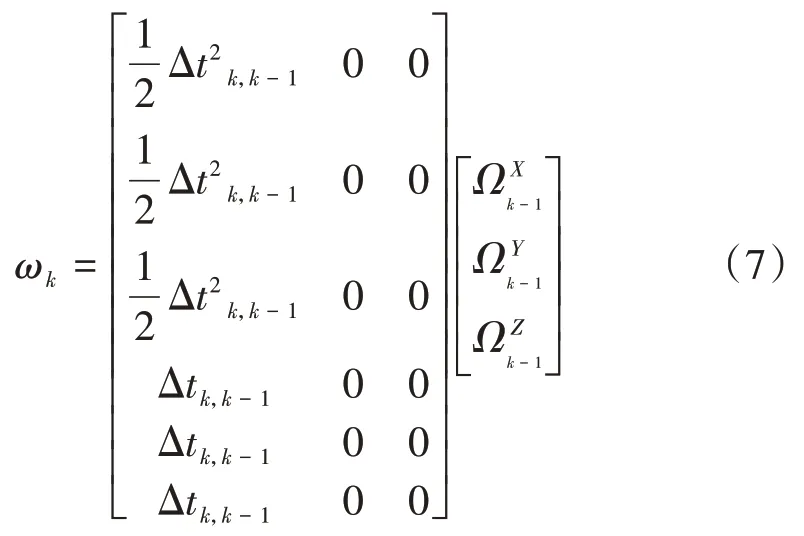
通信铁塔的变形在长时间内都是较为稳定地变化,动力学模型可采用常速度模型,将塔顶2个监测点各自的三维坐标值和变化速度作为状态向量,则运动状态可表示为

式中:Xk,Yk,Zk分别为tk时刻该点的三维坐标分别为tk时刻该点的变化速率;Δtk,k-1为tk至tk-1的时间间隔;ωk为模型输入噪声矩阵。
将加速度Ωk作为随机干扰,则
监测点的位置信息通过直接测量获得,则观测方程为
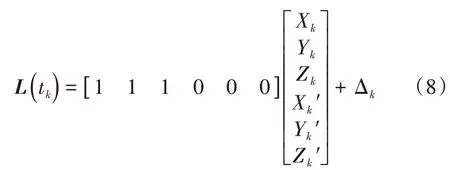
式中:L(tk)为tk时刻观测值向量;Δk为观测噪声。
如果取Δtk,k-1为单位时间间隔,则状态转移矩阵Φk,k-1、观测矩阵Ak、模型输入噪声矩阵ωk都为常定矩阵,分别为

2 变形计算
GNSS 接收机获得的坐标为基于相应地心坐标系下的三维坐标,而监测时需要的是一个基于当前站点的平面直角坐标系。站心坐标系又称东北天(ENU)坐标系;N轴为过选定测站的子午线切线,向北为正;U轴与测站点的铅垂线方向重合,向上为正;E轴垂直于N轴、U轴所确定的平面,形成右手直角坐标系[18-19]。对于变形监测而言,因为U轴是与似大地水准面垂直的,U轴即高程方向,那么监测站在U轴上坐标值的变化即代表了该点沉降值的变化量;E轴指向正东方向,E轴坐标值的变化代表该点在东向上的变化量;N轴指向正北方向,N轴坐标值变化表示该点在北向上的变化量。
在铁塔的顶部布设了2个GNSS接收机A,B,如图2所示,获得2 个监测点在东北天坐标系下的三维坐标A(E1,N1,U1),B(E2,N2,U2),可以计算出 2 个监测点形成的直线对于水平面的夹角α,这个夹角可以认为是铁塔相对于地面的倾斜角,则倾斜角α为


图2 角度值计算原理示意
通过不同监测期数倾斜角之间的比较,可以获得监测期间铁塔倾斜的状态和变化趋势。与此同时,可以通过计算A,B两点所连接的直线相对于N轴的方位角,得到铁塔在水平面上相对正北方向的一个角度偏向值β,通过对不同监测期数偏北角度值的比较,可以获得铁塔在水平方向上的角度变化量及其变化趋势。
方位角β计算公式为

计算完成后得到的β值,并不是最终方位角β'的结果,需要进行象限的判断并对计算结果进行处理:①当β< 0,则β'=β+ 180°;②当β> 0,E2-E1> 0,则β'=β;③当β> 0,E2-E1< 0,则β'=β+ 360°。
3 仿真分析
塔基的监测站数据采用静态后处理技术计算位移和沉降,最终得到的解算结果精度可达到毫米级。为了验证采用抗差卡尔曼滤波对于变形监测结果精度的提高,针对塔顶2 个采用RTK 实时测量的监测站进行变形监测数据仿真分析。
3.1 试验数据
对铁塔顶部2 个监测点A,B各模拟15 期监测数据作为真值,前10 期认为铁塔没有发生任何变形,后5期开始逐步倾斜,模拟的监测数据见表1。

表1 监测15期模拟数据 m
因为采用RTK 相位差分进行监测时存在一定范围的测量误差,所以为表1 中的所有数据施加1 个ε=±5 cm 的随机测量噪声,同时,在测量过程中监测值可能出现粗差,为了模拟粗差可能带来的影响,在两监测点第 4,7,12 期监测数据中,额外施加 1 个 3 倍于随机测量噪声ξ=±15 cm 的粗差影响量,最终获得的数据作为GNSS实际观测值。
3.2 数据处理与分析
仅对监测点A的E坐标滤波处理结果进行分析,其他处理的结果与此类似。对15期监测点A的E坐标值进行抗差卡尔曼滤波处理,得到每一期的滤波值。
抗差卡尔曼滤波值能有效抵抗测量误差对于滤波估计值的影响,滤波值与测量值、真值的比较见图3。可知,在第4,7,12 期都能有效的抵御粗差带来的影响,但由于没有多余观测并且是采用最近3 期的监测数据进行抗差处理,所以仍然会受到粗差的影响,且粗差值越大受到的影响越严重。
抗差卡尔曼滤波值、观测值与真值的误差见图4。

图3 抗差卡尔曼滤波值与测量值、真值的比较
可知,抗差卡尔曼滤波值与真值的差值均小于设定的随机测量噪声值(5 cm),不仅能够较好抵抗3 倍于测量噪声的粗差带来的影响,而且能通过滤波平滑削弱测量偶然误差。
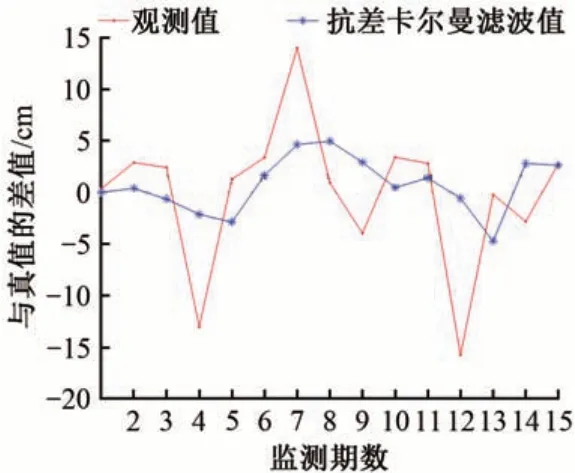
图4 抗差卡尔曼滤波值、观测值与真值的误差
最终求得的倾斜角、方位角,其与真值的比较见表2。可知,计算出的倾斜角与真值、方位角与真值的差值均小于0.5°,具有较高的测量精度。
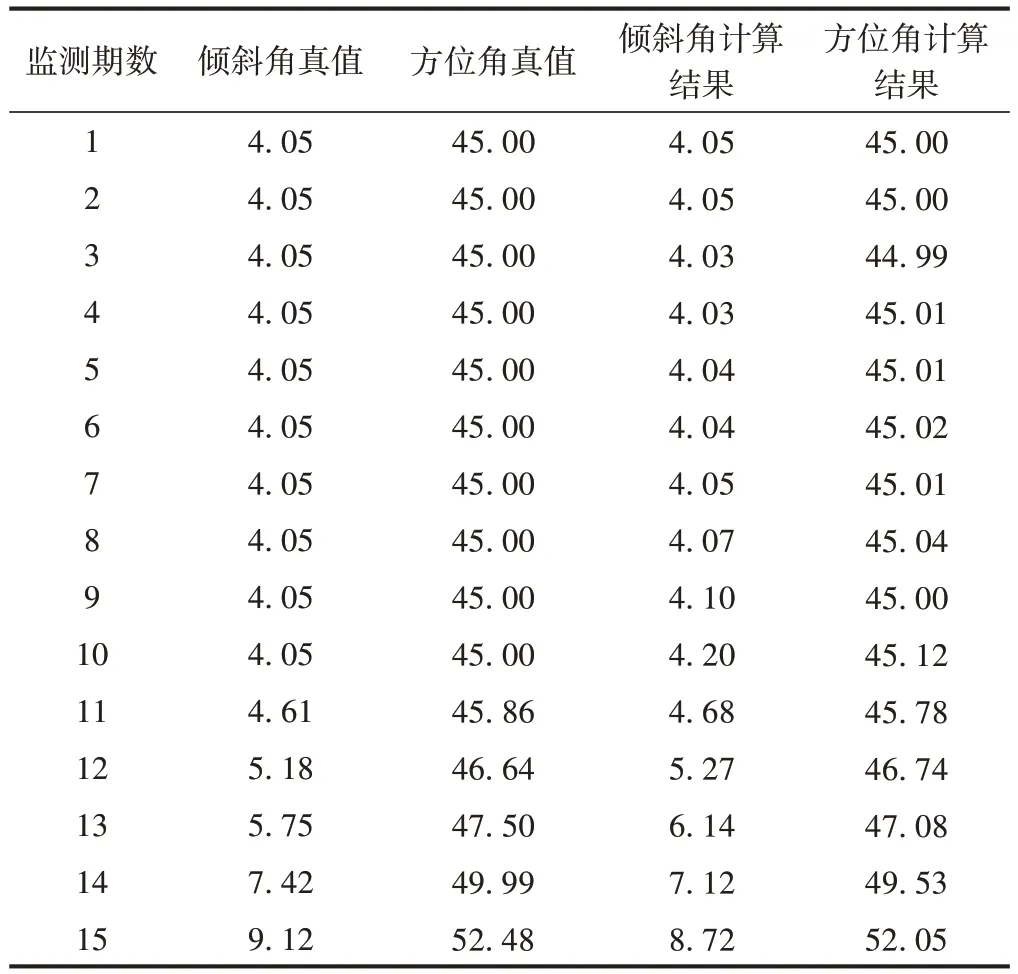
表2 角度计算结果与真值的比较 (°)
4 结语
基于GNSS 的铁塔变形监测相对于采用倾斜角测量、惯性测量等方式,具有直接测得铁塔地理位置,获取倾斜角、沉降量等监测数据,且相对造价不高,布设较为简便等优点,但在测量过程中易受到粗差影响,导致最终的结果与真值相差较大。
本文提出采用抗差卡尔曼滤波对GNSS 动态测量的结果进行滤波,能有效削弱观测向量中粗差带来的影响。通过对仿真数据进行分析,可以看出经过滤波不仅削弱了RTK 实时测量中存在的粗差,而且可以在监测设备测量精度不变的情况下通过滤波进一步提高测量精度,具备对铁塔倾斜、沉降等变形进行高精度、实时监测的能力,同时可以为进一步进行试验验证提供理论基础。
猜你喜欢
中国化肥信息(2022年3期)2023-01-05 03:42:41
阅读与作文(小学低年级版)(2020年2期)2020-05-25 02:58:43
电子制作(2017年1期)2017-05-17 03:54:35
测绘科学与工程(2017年1期)2017-05-04 03:40:44
智能系统学报(2015年5期)2015-12-03 05:18:20
地理与地理信息科学(2015年4期)2015-10-13 08:29:15
电力建设(2015年2期)2015-07-12 14:15:59
浙江大学学报(工学版)(2015年2期)2015-05-30 07:05:04
电测与仪表(2015年21期)2015-04-09 11:52:08
兴趣英语(2013年5期)2013-09-24 06:52:58
