
基于DSM 自动提取建筑物轮廓线的研究
2020-09-22 11:12李小红
经纬天地 2020年4期
李小红
(山西省测绘地理信息院第一测绘院,山西 太原 030002)
0.引言
随着城市的快速发展,能快速、高精度地提取建筑物的基本情况,对城市规划和建设有极其重要的意义,对航空摄影测量产品的快速更新和地理国情数据建库的更新以及对三维建模也有非常重要的意义。1∶10000DLG 房屋层生成现有的方法有三种:(1) 利用符合时相的大比例矢量图缩编,此方法作业效率高,但可利用的大比例尺矢量数据成果较少;(2)利用航空影像立体测图,劳动强度大,作业成本高;(3)利用正射影像提取建筑物轮廓线,在城区楼层较高区域建筑物投影差较大,精度不能保证,还有部分建筑物被遮挡及阴影等很多因素干扰, 从高分辨率卫星影像和航空影像中提取建筑物轮廓会有好多被遮挡的建筑物的轮廓提不到的情况。
LiDAR(Light Detection And Ranging)是激光探测及测距系统的简称。LiDAR 系统是一种利用机载激光扫描(Airborne Laser Scanning,ALS)技术快速采集地表点的摄影测量装置,可自动生成精确的数字表面模型 DSM(Digital Surface Model)。ADS100 是徕卡公司的一款采用线阵CCD 推扫式数字成像技术,集成了全球卫星定位系统(GPS)和高精度惯性测量系统(IMU),其成果可以直接用于测绘生产作业,最大限度地减少了外业控制测量工作,提高了摄影测量的工作效率和成果质量。
像素工厂与传统的摄影测量软件相比较, 其中一个优势就是高效自动大面积计算数字表面模型(DSM)。超高精度数字地面模型栅格大小能达到0.04m的空间DSM(依赖原始影像分辨率),在计算获得的高程影像上噪声通常比较少,适用于光学卫星、雷达卫星以及航拍影像,不同于传统的基于相关算法的技术,做完空三之后,像素工厂生成立体相对,根据前后视及下视的多重相关,在并行节点上快速生成高分辨率的DSM。DAS100 航摄仪可以获取高分辨率的影像,利用像素工厂生产高精度的DSM。
近年来,很多学者对利用点云数据提取建筑物轮廓进行了大量的研究。如武汉大学的李必军等提出的利用建筑物的几何特征,从激光扫描数据中进行建筑物特征提取研究;南京大学的程亮等提出在LiDAR 辅助下利用超高分辨率影像提取建筑物轮廓方法等。利用机载激光雷达获取的点云数据或航空摄影测量处理计算生成的DSM 数据包括了地形和地貌的三维数据,本文提出了通过DSM 数据提取建筑物的轮廓线的方法。
1.原理和方法
因为DSM 是在DEM 的基础上包括了建筑物、构筑物、树木、植被等要素,所以要提取建筑物的轮廓等信息,就需要首先提取出地物信息,通过机载激光雷达或航空摄影测量获取的LAS 格式的DSM,对DSM 进行滤波处理生成DEM,利用DSM 与DEM 的差值模型影像,再根据建筑物几何形状基本规则,折角一般接近直角,面积比较大,房顶高程基本一致等特性。根据高程阈值和面积阈值从地物中过滤掉植被等其他地物点,生成建筑物轮廓线,将轮廓线转点,通过房子的一些特征,平行、垂直进行建筑物轮廓线细化。流程(如图1 所示):
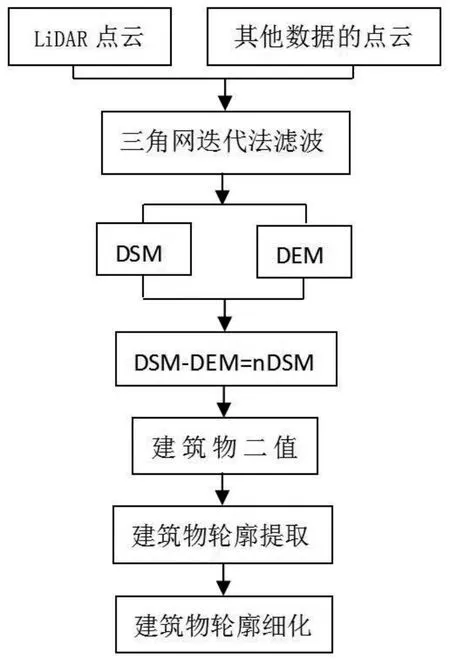
图1 技术流程
1.1 数据预处理
比周围点的平均高程明显高的点为空中点,这些点通常是噪点,低点通常指的是一个或一组比周围点明显低的点,一般在地面点分类之前需进行低点分类,而且需要分类多次才能全部找到低于地面的错误点。需要去除错误点和激光扫描仪的系统误差可能造成不必要的高位或低位的粗差点云。首先,利用滤波软件剔除这些粗差点云。剔除DSM 中的坏值,即极高、极低粗差点。然后,基于地形坡度学的分类方法,该方法根据假设法,假设两个相邻的点的高差不可能由地形陡坡引起,这些高程点更可能是非地面点,两点的高差随着两点距离缩小,较高的点为地面点的可能性降低。通过迭代法建立三角网的方式过滤地面点,例如假设max building size = 70m,它则是假设在一个70m×70m 的区域内,至少有一个点为地面点。通过该方法找出一些初始的地面点构成三角网,再根据限制的条件(地形的角度、迭代角的大小、迭代距离),不断地向三角网中加入LAS 点进行迭代,进一步细化三角网,最终得到的三角网顶点则为地面点。根据地形类别的不同,选择不同的参数,一般城市地区,Max building size 要设大点,在山区或农村,Max building size 要设小点。通过滤波后剩下的非地面点中还包含房屋、车辆、树木、花草等地物。
1.2 生成 nDSM
由于地形的高低起伏太大会给提取建筑物轮廓带来麻烦,灰度值较大的区域不一定是高建筑物,可能是其所在的地形较高。同时,地形的起伏会给建筑物轮廓的提取算法增加了干扰,容易引起错误。因此,我们必须首先消除DSM 地形因子,提取数字地面模型(DEM),然后获得规格化后的DSM(即nDSM),然后开始构建提取。由于机载激光雷达或者航空摄影测量获取的DSM 包括了地形和地貌,要提取建筑物的信息,建筑物属于地物,首先要去掉地貌,用DSM 和DEM 做差值计算,生成地物影像。
1.3 建筑物影像分割
利用边缘分割的算法,对地物影像进行分隔,这种算法计算很快,通过不同阈值控制,从而产生从粗到细的分隔。选择高的阈值将会分隔出很少块,选择低的阈值将会分出很多块,要选择合理的阈值进行分隔,尽量分隔出好的边界。地物影像除了建筑物,还有植被、围墙、道路等地物。利用建筑物比较高、面积比较大、屋顶高程一致的特性,提取建筑物影像。
(1)根据建筑物高度一般都高于3m,所以高程阈值h 设为3m,这时候把低矮植被、汽车等过滤掉,从地物影像里提取h>3m 的地物影像;余下的地物影像主要包括高植被和建筑物。
(2)检测、标记并计算连通地物影像的面积。
(3)根据建筑物的面积一般都大于6×6m2,设面积阈值S>36m2,可以过滤掉孤立的高植被、电线杆、路灯等地物。
(4)利用第三步提取的地物影像,生成二值图像,如式(1):

式(1)p(xi,yj)表示点(xi,yj)高程值,一幅二值图像按照从左到右、从上到下的顺序搜索,找到的第一个g(x,y)=1 的点作为种子点, 将种子点的8 邻域范围内的高度与种子点的高度做差值,得出它与其连通地物影像每个像元的高差值Δhi,若所有的Δhi<0.5m,则该连通区域为建筑物。
(5)剩下的建筑物面边缘杂乱,面中仍存在由数据处理中产生的小面积数据空白,建筑物面还存在不规则缺口和凸出块的情况,为了处理小面积的空白和不规则的缺口和凸出块,利用数学形态学中的闭运算操作,闭运算的原理是先膨胀后腐蚀的联合运算,闭运算第一步需要先估算出空白数据的最大面积,然后用该面积除以单元格网的面积,取整数之后可得数学形态学闭运算需要窗口B 的大小。数学形态学闭运算可以填充比窗口B 小的缺口、孔洞和连同小间隔的间断以及平滑边界的功能,闭运算可以部分弥补建筑物面域的空洞。闭运算是利用结构元素B 对初始提取的建筑物面A 进行膨胀,然后接着再进行一次腐蚀的结果,其公式如式(2):

式(2)中,A 为提取的建筑物面的集合;B 为窗口大小;·为闭运算;为膨胀运算;θ 为腐蚀运算。
1.4 建筑物轮廓提取及规则化
根据建筑物影像是二值图,利用ArcGIS 矢量化建筑物边线,先建一个面矢量文件和一个线矢量文件,设置坐标系与影像坐标系一致,开始编辑线矢量,在菜单栏上点击“自定义”下的“工具条”,勾选上ArcScan 工具条,在ArcScan 工具条上点击“矢量化”,选择矢量化设置,在弹出的“矢量化设置”设置样式为“轮廓”, 在ArcScan 工具条上点击“矢量化”,选 “生成要素”,按照默认设置生成建筑物矢量。生成的建筑物轮廓线有好多条线段组成。根据实际情况建筑物的边数不会太多,建筑屋顶轮廓线存在平行、直角等特点,需要规则化建筑屋顶边线,修整过程包含两步:(1)对所得结果中近似平行的一些直线进行合并。(2)根据建筑物一般形状是规则的几何形状,折角接近直角,把相交线正交化。
2.实验结果及分析
2.1 实验数据
本文使用一种格网间距为0.2m-0.3m 的LiDAR点云数据和一种地面分辨率优于0.2mADS100 航空影像数据。两种数据是使用不同机载设备、采集相同区域得到的不同密度的点云数据。选取的该试验区覆盖面积约为6.7km2,且地势比较平坦,适合于采用本文的方法进行实验。LiDAR 点云数据的密度是每平方米16点, ADS100 航空摄影数据处理获取的分辨率为0.4m的DSM 及LAS 格式的点密度是每平方米2.5 点。
2.2 实验结果
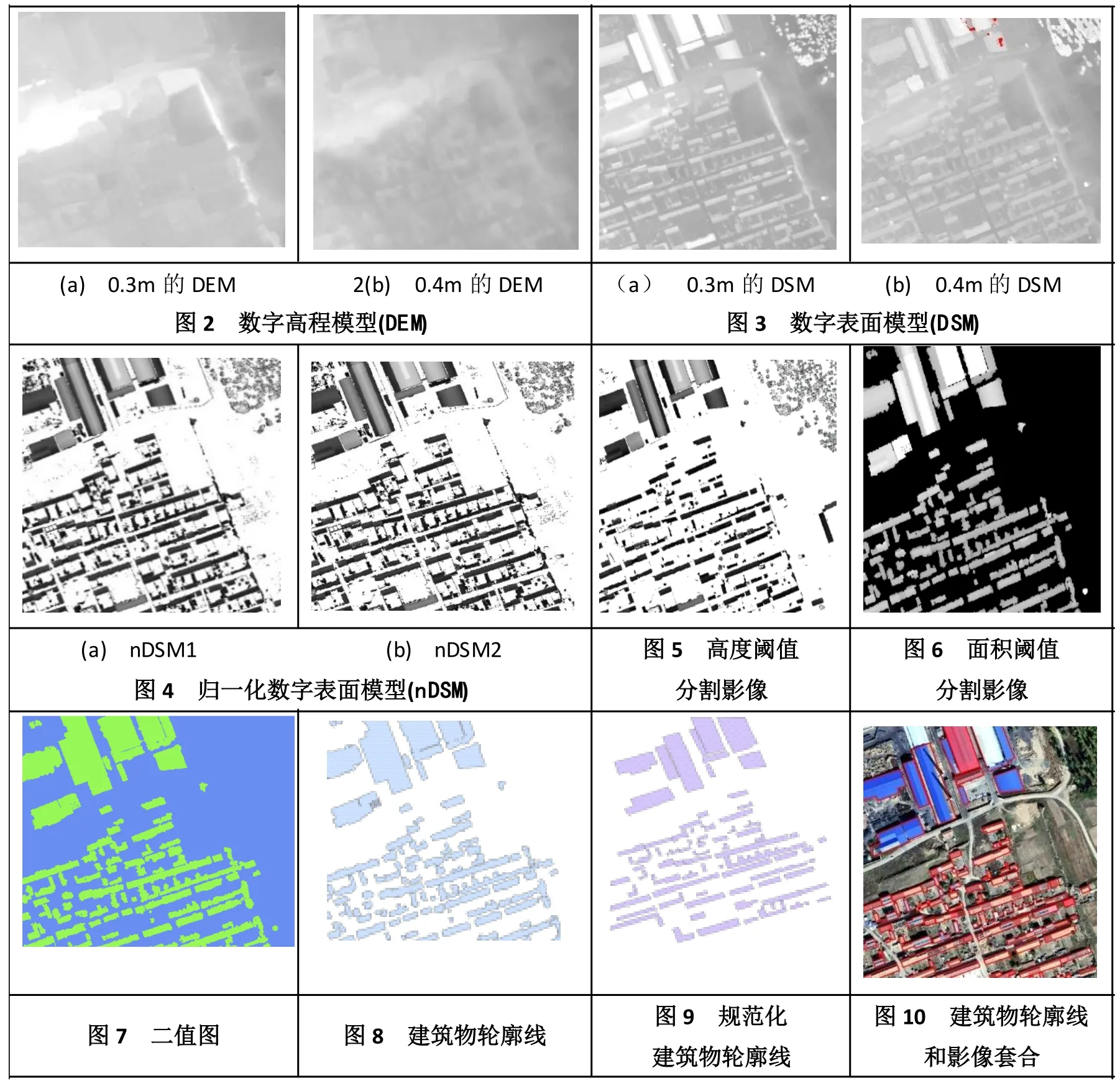
首先将像素工厂生成的分辨率为0.4m 的DSM 数据转换成LAS 格式,基于TerraScan 软件剔除粗差点(及LAS 中的极低点和极高点);然后,采用三角网迭代滤波法区分出地面点和非地面点,利用二次样条函数法从分离出来的地面点层内插生成的格网间距为0.3m 和 0.4m 的 DEM,(如图 2 所示);也利用二次样条函数法将滤除低点的LAS 点内插生成的格网间距为0.3m 和 0.4m 的 DSM,(如图 3 所示)。从图 3(a)和 3(b)中可以看出建筑物比较多,除了建筑物还有围墙、车辆和植被等地物。再利用DSM1 减去DEM1 得到差值影像nDSM1(如图 4(a)所示);利用 DSM2 减去 DEM2 得到差值影像nDSM2(如图4(b)所示)。根据建筑物高度一般都高于3m,所以高程阈值h 设为3m,这时候把低矮植被、汽车等过滤掉, 从地物影像里提取h>3m 的地物影像;余下的地物影像主要包括高植被和建筑物,(如图5 所示)。图6 为采用面积阈值获得,去掉低矮植物、围墙、独立树的地物影像图。图7 为根据初步的建筑物影像图生成二值图,黑色值0 为非建筑物,白色值1 为建筑物。图8 为提取的建筑物轮廓线。图9 为对平行线近似合并及对建筑物线进行正交化处理的结果。
2.3 结果分析
为了分析提取建筑物轮廓线的精度,采用了两种方法,一种方法是通过建立立体相对,利用ERDAS 软件里的测图模块(LPS)采集建筑物矢量,将自动提取的建筑物边界线和立体采集建筑物矢量进行套合,结果显示两套矢量数据基本套合;另一种方法是利用提取的建筑物轮廓线和正射影像进行套合,结果显示也基本套合(如图10 所示)。但是,由于高度阈值、面积阈值设置过大会出现个别漏提和高度阈值、面积阈值设置过小多提的情况。
3.结束语
本文提出了从激光雷达或从ADS 数据获取的LAS 格式的数据,通过滤波分离出地面点和非地面点,做差值影像,分离出非地面点,通过高度阈值、面积阈值和建筑物顶接近平行,分割出建筑物,自动提取建筑物的粗略边线并进行细化得到建筑物边界线,能够满足1∶10000 DLG 生产的需要。
本文的方法仍然存在一些不足,实验中发现了分割建筑物时,有少数建筑物和邻近非建筑物分割成同一个建筑物面的情况,所以建筑物规则化处理算法有待更好地解决。今后将进一步对利用LAS 数据结合正射影像提取建筑物轮廓线的方法和基于分类法从真正射影像中提取建筑物轮廓线的方法进行研究。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
数学小灵通(1-2年级)(2020年6期)2020-06-24
中国教育信息化(2019年22期)2019-12-20
小学生学习指导(低年级)(2019年9期)2019-09-25
计算机系统应用(2017年3期)2017-03-27
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
小天使·二年级语数英综合(2015年12期)2015-12-04
