
无人机倾斜摄影测量在1∶500 地形图测绘中的应用
2020-09-22 11:12戴金荣
经纬天地 2020年4期
戴金荣
(龙岩市勘察测绘大队,福建 龙岩 364000)
0.引言
无人机倾斜摄影测量作为一门新科学技术,在城市规划、日照分析、地质沉陷监测、精准测量等领域得到广泛应用[1,2]。无人机倾斜摄影测量具有操作简单、节约人工、精度高等优点,目前具有极广的市场应用价值[3,4]。
周吕等[5]重点研究某体育馆建筑,借助Context Capture 分析无人机影像从而构建体育馆模型,三维各向误差在3cm 以内;钱琛等[6]将无人机低空倾斜摄影应用于新农村建设,并提出优化技术应用途径;牛井义[7]将无人机三维倾斜摄影应用于矿山监测,有效提升了矿山测绘精准性和成图速度;齐昌洋[8]在竣工规划测量中引入了无人机倾斜摄影测量技术,为工程竣工验收提供依据。
本文以龙岩市红坊片区为研究区域,进行无人机倾斜摄影测量,并总结了该项技术的特点及操作过程。最终得到全要素1∶500 数字线划地形图,为区域规划提供依据。
1.无人机倾斜摄影系统
无人机倾斜摄影系统中,无人机型号为大疆经纬600Pro 无人机,搭载的倾斜摄影相机品牌为双鱼,适用于大面积块状、带状等测量区域。该系统除了无人机和搭载相机外,还有成熟的控制模块。该系统成本较低、操作难度低、精准度和影像分辨率高,在倾斜摄影测量与快速三维建模中具有显著的优势。
1.1 飞行平台及倾斜摄影平台
无人机倾斜摄影系统多用于低空摄影测量,可实现厘米级导航定位和高清成像,同时具有便于外出携带的特点。无人机倾斜三维摄影平台,适用于无人机进行地形图测量工作,影像分辨率最高可达1.5cm。
1.2 自动建模软件
三维建模软件采用的是ContextCapture Master 自动建模系统,该系统是一种快速三维场景运算软件,整个过程只需简单的人工干预,人工给予一定数量的控制点,便能基于连续影像自动生成三维实景模型,模型成果采用OSGB 数据格式,采用多达12 层的分层显示技术(LOD),以保证地物模型及建筑物细部特征清晰显示,自动建模技术整体架构。(如图1 所示):

图1 自动建模技术整体架构图
1.3 三维测图软件
三维测图软件使用航天远景的MapMatrix 5.0 平台下的倾斜测图模块,在高精度三维模型的基础上采集二维矢量信息。该平台可实现接入航天远景、JX4 航测一体化采编及信息化测绘入库,是采编一体化的测量系统。三维测图界面图(如图2 所示):
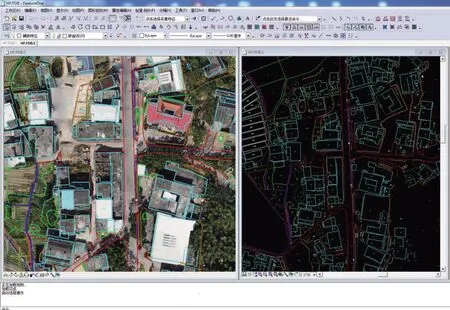
图2 三维测图界面图
1.4 其他辅助软硬件
GNSS 接收机、手持式激光测距仪、数字水准仪、全站仪、计算机、数字测图软件。
2.研究区分区及空中三角测量和模型建立
2.1 研究区概况
研究区位于龙岩市新罗区西南,呈不规则形状,东西长约2.45km,南北宽约5.27km,测图面积为5.5km2。研究区中心地处北纬25°03′,东经116°59′,涉及田心村、上洋村、进贝村、龙溪邦村、东埔村等村庄。居民地较密集,房屋以3 层左右为主,给测量带来了很大困难,研究区困难类别为Ⅱ类区。研究区区域范围示意图。(如图3 所示):
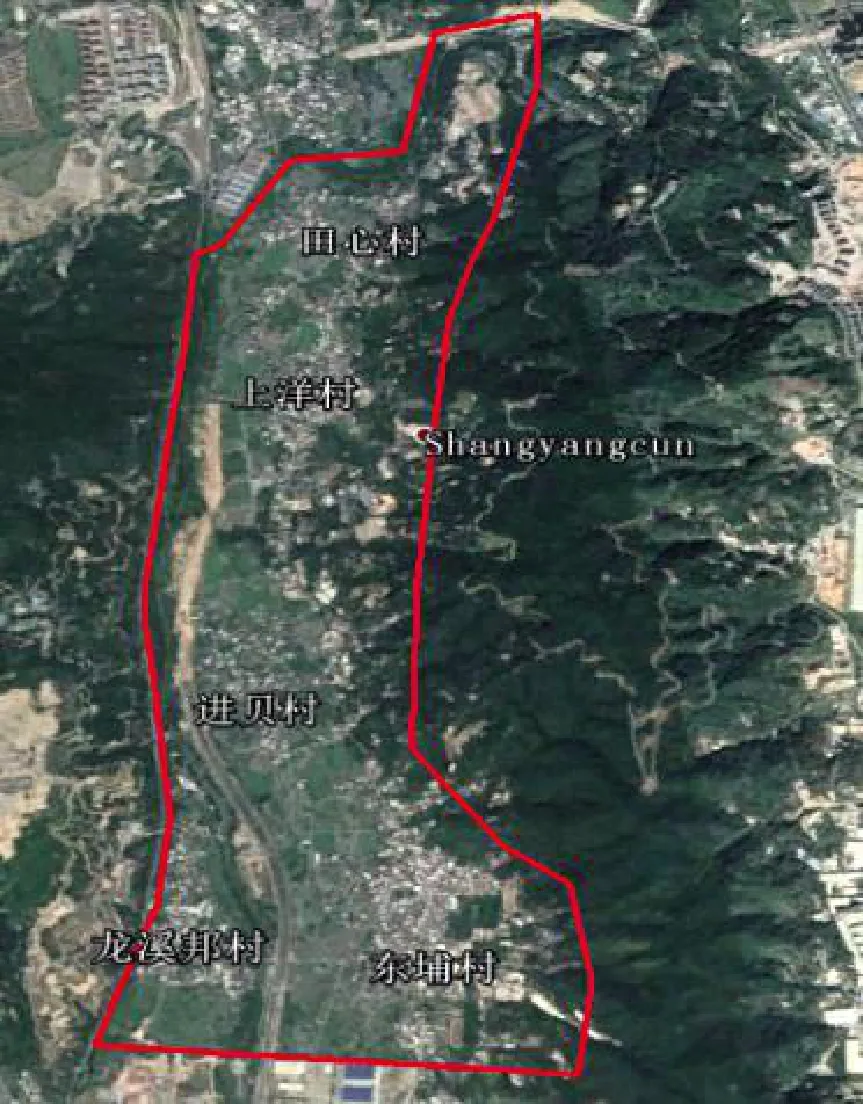
图3 研究区区域范围示意图
2.2 摄影分区与航高设定
研究区海拔最低处348m,最高535m,高低落差约200m,且研究区为大面积面状区域,呈南北走向趋势,主要施测对象为范围内的地物、地貌。由于无人机摄影测量需在摄区范围上空执行往复航线,考虑到单架次航线长度受无人机电池续航及安全控制距离的影响,以及为了保障三维图像成像的质量,采用结合分区的地形条件,测图等高距,考虑基高比,综合考虑效果、效率、成本等因素,最终按照单条航线距离1km-2km 将航线分为以下4 区块:区块1 为房屋密集区,区块2 与区块3 为房屋田地结合区;区块4 为高程落差较大的山边区域,。本项目地面分辨率为1.6cm,无人机航摄高度为120m,最终地面分辨率均优于规范要求的5cm。研究区摄影分区示意图(如图4 所示):

图4 研究区摄影分区示意图
2.3 航线设计
航线按大面积无人机往复航线敷设,根据所提供的红线范围,并利用缓冲区工具对所绘制的范围线进行150m 范围外扩,保证研究区最边缘地物采集完整,建模时没有破洞。最终形成“红坊航飞范围.KML”文件,作为飞控引导文件。本项目总计飞行18 架次航线,总条数108 条,总航程175.5Km。其中主线按东西向布设,构架线按南北向布设。四处摄影分区的航线图分别(如图 5、图 6、图 7、图 8 所示):
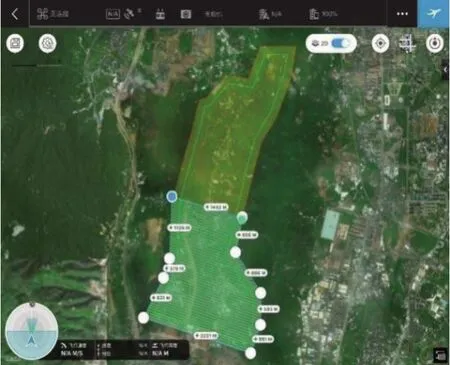
图5 分区1 航线设计图
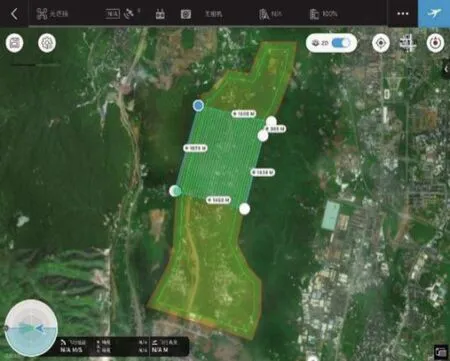
图6 分区2 航线设计图
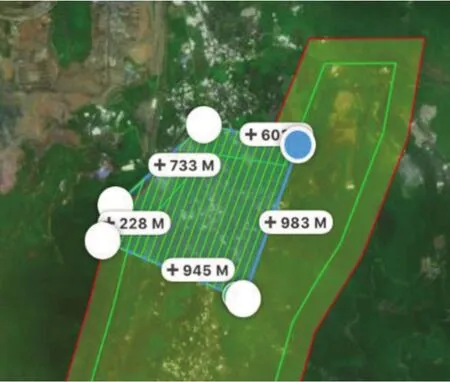
图7 分区3 航线设计图

图8 分区4 航线设计图
为保证航摄光线,将航摄时间定为正午前后两小时。主航线航向、旁向重叠率皆为75%,航向、旁向覆盖均超出摄区边界线150m。
2.4 像片控制测量
控制点的标志点,在水泥道路红色油漆画边长为40cm、宽度为 20cm 的L 字形标志(如图9 所示):

图9 像片控制点
2.5 空中三角测量及三维实景模型建立
自动建模系统中空三计算是通过光束法区域网整体平差方法自动完成,完成空三解算,选取坐标系,导入相应的像控点,并完成刺点。本次共获取有效像片27640 张,像控点共71 个,采用710 张数字像片进行刺点,刺点位置是L 字内交叉的中心,刺点完成后,再进行绝对定向。定向完后,进行模型建立,并最终选择模型坐标系、范围及分块尺寸,通过自动建模系统生成三维实景模型。(如图10 所示),本次求得空三精度平面最大误差0.02m,高程最大误差0.02m,均在规定的限差内。

图10 三维实景模型
3.后期处理及成果精度
3.1 内业制图
居民地、工矿建筑、道路设施、管线设施、水系设施、水稻田等地形地貌测绘采用三维测图模块,以生成的三维实景模型为基础,先内业后外业的作业方法,内业按立体模型定位,外业实地定性, 对能够准确判读的地物、地貌要素,均全部采集,影像不清晰、要素部确定而无法采集时,用特殊符号标记,并进行实地补测。生成满足1∶500 数字线划图规范要求的地形图。
3.2 数字线划图调绘与修补测
通过裸眼采编内业三维测图时,由于房屋、屋檐、门檐、树木等遮挡导致生成的三维实景模型局部变形,三维测图无法或不能准确采集这些要素点,还有少部分不明显特征点需要进行补测,电杆等之间的连线要外业调查得出。所以还需对少部分不明显特征点采用全站仪设站进行补测、利用手持式激光测距仪或钢尺按交会法进行补量。
3.3 调绘成果
通过无人机倾斜摄影测量,得到全要素1∶500 数字线划地形图(如图11 所示):

图11 全要素1∶500 数字线划地形图
3.4 现场采集点与模型平面和高程精度比对
本测区采用全站仪设站在地物点相对邻近图根点设站实地采集方式,采集一定比例且在测区内分布均匀的建、构筑物等明显地物点平面位置,及道路、农田高程、水泥坪等地形高程,本次共采集平面位置点330个、高程点210 个,通过与模型进行平面和高程精度比对,验证模型质量精度。详细精度分析(如表1、表2 所示):

表1 现场采集点与模型平面点精度比对

表2 现场采集点与模型高程点精度比对
通过上表可以得出,地物点相对于邻近控制点的平面点位中误差和高程中误差均优于规范要求的指标,因此采用无人机倾斜摄影测量能满足《城市测量规范》规定。
4.结束语
(1)本文介绍了无人机倾斜摄影测量系统的组成,对仪器设备、自动建模及三维测图软件进行了详细介绍,为无人机倾斜摄影测量系统的构建提供参考。
(2)通过结合实例,对无人机倾斜摄影测量的应用进一步展开研究,实践表明新工艺对测量技术的支持与提升有很大的促进作用。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
华人时刊(2021年23期)2021-03-08
小哥白尼(神奇星球)(2021年12期)2021-03-08
知识经济·中国直销(2018年7期)2018-07-27
北方音乐(2017年4期)2017-05-04
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
人间(2015年11期)2016-01-09
