深空探测中着陆雷达技术发展与应用研究
2020-09-22 03:22陈建武史永敏祝浩郭绍刚邓楼楼赵春晖王立
航天返回与遥感 2020年4期
陈建武 史永敏 祝浩 郭绍刚 邓楼楼 赵春晖 王立
(北京控制工程研究所,北京 100190)
0 引言
雷达具有可自主地、全天时、全天候获取远距离目标信息的的特点,在人类探索宇宙过程中发挥着特别重要的作用。按照功能可分为地基雷达、星载表层穿透雷达和进入、下降和着陆(Entry,Descent,Landing,EDL)雷达。地基深空探测雷达可用于对太阳系行星、月球、火星等空间目标科学研究,在月球、火星、小行星探测任务中有着独特作用[1]。星载表层穿透雷达,工作在低频波段,载于环绕器、着陆/巡视器,实现对天体目标内部的断层成像,包括“阿波罗17号”轨道器的雷达探测仪ALSE[2]、“嫦娥三号”的测月雷达[3]、“火星快车”的 MARSIS[4]、火星勘测轨道飞行器的 SHARAD[5]等,成为行星地质勘探、水冰勘察与小星体内部成像的重要研究方法。
着陆雷达包括雷达高度计和多普勒测速雷达,在军用飞机、直升机、无人机以及载人航天器、深空探测器等领域有着广泛应用,是深空探测器EDL系统关键产品[6]。随着技术进步与发展,着陆雷达从单一雷达高度计发展到能够同时测量高度与速度矢量,而且已具备自主着陆多功能感知能力,可在复杂环境下全天候工作,是未来无人着陆器定点和安全软着陆的重要保障。
本文系统地归纳了以“阿波罗11号”、“嫦娥三号”、“嫦娥四号”为代表的月球探测器、以国外历次成功着陆火星任务为代表的火星探测器以及以“隼鸟号”、OSIRIS-Rex为代表的小行星探测器任务中着陆雷达技术发展和应用,并对着陆雷达技术未来发展的趋势及所面临的挑战进行展望与分析。
雷达是利用目标对电磁波的散射来发现目标并测定目标的空间位置。着陆雷达用于测量和引导飞机、航天器等相对着陆区域的位置信息,包括方位、仰角、距离等,保证安全着陆。按工作波长可分为微波雷达、毫米波雷达和太赫兹雷达等;按功能分为雷达高度计和多普勒测速雷达,分别利用电磁波飞行时间和多普勒效应测量目标的距离和速度。
1 微波雷达
微波雷达(Microwave Radar)是指工作频率在微波频段的雷达。微波雷达具有探测距离远、指向性好、测量精度高的特点,但天线口径大、波束宽,影响了微波着陆雷达的体积和分辨能力。
1.1 月球着陆雷达
着陆雷达技术首次应用于“阿波罗11号”登月舱,由雷达高度计和多普勒测速雷达组成,可以测量登月舱相对月面的速度和距离。着陆雷达安装在登月舱下降级,由天线和电子线路两部分组成。天线组件由天线阵和固态发射器组成,能产生、指向、发射并接收4波束微波信号。电子线路用于跟踪、处理、转换和放大多普勒或调频/连续波的回波信号,并将获取的位置和速度传递给控制计算机[7]。雷达高度计工作在锯齿波调频模式,测速雷达工作在连续波模式,频率10.51GHz;通过机械装置切换雷达天线指向增大量程范围,实现1.4%测距精度和2.0%测速精度。
日本正在规划的月球着陆器“月亮女神二号”(SELENE-2)搭载激光高度计、光学相机、着陆雷达等,用于精准和安全着陆。着陆雷达采用4.3GHz的C波段脉冲体制多波束雷达(包含5个波束),其中一个42°宽波束用于测量垂直方向高度,4个15°倾斜窄波束测量水平方向速度。采用贴片阵列多波束天线,发射功率1W。根据测量高度分为3个工作模式,采用最小旁瓣脉冲压缩技术并自动调整脉冲宽度,实现5%测量精度[8]。
我国“嫦娥三号”着陆器采用激光测距多普勒雷达和微波测距测速雷达实现高度和速度测量,用于软着陆动力下降的自主导航[9]。微波测距测速雷达工作在X频段(7.9GHz)和Ka频段(34.24GHz)[10],采用双波段雷达有利于增强雷达对不同地形适应能力,共配置有 5个天线波束,其中 3个独立测速,1个独立测距,1个兼具测距和测速功能,测量范围15m~16km,测量精度0.33%[11]。
微波雷达在月球探测中发挥重要作用,但雷达天线体积大,测距精度低,而毫米波雷达具有波束窄、体积小和高精度特点,可用于着陆避障,印度“月船二号”采用 Ka波段着陆雷达[12],美国重返月球探测器将沿用“火星科学实验室”(Mars Science Laboratory,MSL)的毫米波着陆雷达[13]。

表1 月球着陆器上着陆雷达的性能指标Tab.1 Performance of landing radar on lunar lander
1.2 火星着陆雷达
从1962年前苏联首次尝试登陆火星,到2018年11月26日美国“洞察号”成功着陆火星,首次探测火星土壤内部,世界各国共实施了21次着陆探测任务,完全成功的有8次,释放了4个火星巡视器,分别是“火星探路者”(Mars Paths Finder,MPF)、“勇气号巡视器”(Spirit,MER-A)、“机遇号巡视器”(Opportunity,MER-B)和“好奇号火星巡视器”(Curiosity),其外形如图 1所示[14]。

图1 美国三代火星巡视器对比Fig.1 Comparison of NASA Mars rovers
为了提高探测任务的科学回报,需要在保证安全着陆的同时,选择火星表面特定高价值区域作为着陆点。提高着陆精度最有效方法是提升EDL技术,实现精确着陆。着陆雷达一般在火星探测器抛除防热罩之后引入,是EDL下降段的关键产品之一,用于实时测量着陆器与火星表面的相对位置和速度。着陆雷达主要包括雷达高度计、多普勒雷达和激光雷达等,其中雷达高度计在火星探测器中获得广泛应用。表2列出了火星探测器EDL关键敏感器的典型配置,一般包括惯性测量单元(Inertial Measurement Unit,IMU)、雷达高度计和多普勒雷达等,部分探测器配置光学相机用于补充测量速度以及下降过程中的事件监测[15],为将来自主避障积累数据。我国首个火星探测器也将采用微波测距测速雷达,并结合惯性测量单元获取精确的相对导航精度[16]。

表2 火星探测器EDL敏感器配置Tab.2 Sensors for Mars detector EDL
首次成功着陆的火星探测器“海盗-1号”采用与阿波罗月球探测器相同的雷达高度计和终端降落着陆雷达;美国第一代火星车“火星探路者”和“火星探测巡视器”采用军用飞机雷达高度计HG8505DA,通过振动试验、热试验和真空试验筛选后在轨飞行。HG8505DA是一款C波段脉冲连续波雷达,采用砷化镓单片微波集成电路和固态发射技术,利用两个正交天线发射非相干脉冲,工作在“第一返回”(First-return)模式,避免着陆器着陆姿态影响高度测量[17]。“火星探路者”在进入火星大气层的276s时,高度计第一次捕获到地面高度1 591m,如图2所示,在着陆过程中高度计测量结果无干扰或数据丢失。
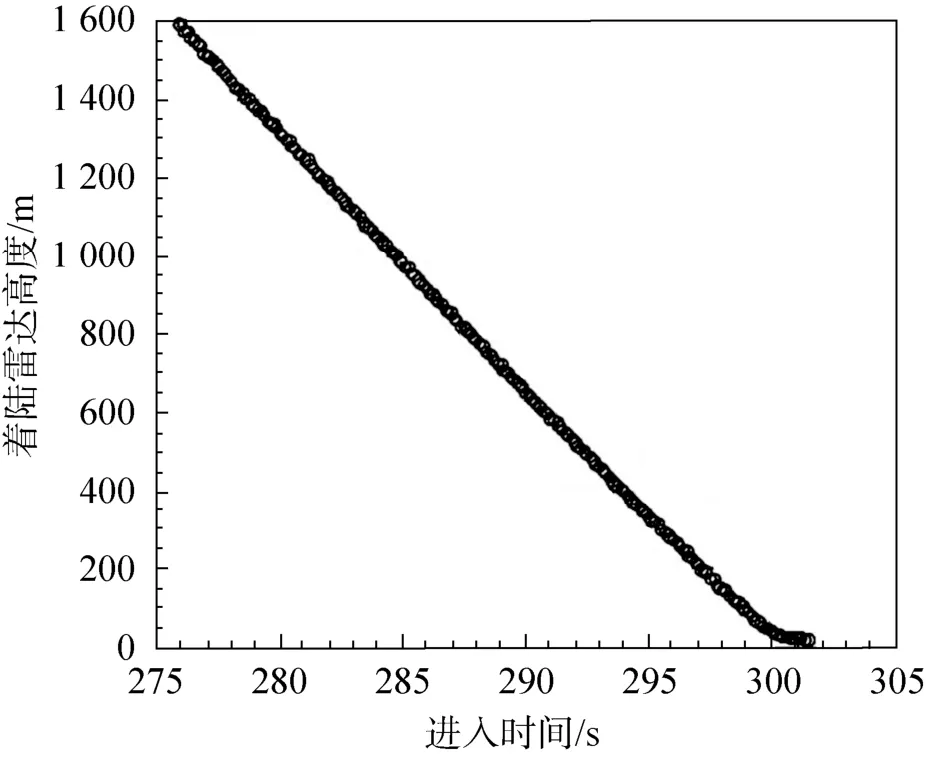
图2 火星探路者着陆雷达测量进入高度Fig.2 The entry altitude of MER landing radar
“凤凰号”(Phoenix)和“洞察号”(Insight)火星车要求着陆雷达具有多普勒测速功能,使着陆器能适应火星表面各种斜坡,尽可能降低着陆瞬时速度,提高鲁棒性[18]。着陆雷达继承自“火星极地着陆器”(Mars Polar Lunder,MPL),采用4个宽波束轮流工作测量高度和速度。为提高速度测量精度,多普勒采样周期设计为短周期和长周期两种模式。雷达利用双相位调制脉冲原理,脉宽和调制波形随着陆高度自动调节,从而获得最强回波和精度,实现测速精度2%[19]。与“火星探路者”不同,雷达天线从4根增加到8根,实现收发分离,避免天线切换速度影响最小探测高度,高度范围0~2 438m,精度5%。为提高雷达可靠性,开展大量测试和验证工作,包括直升机挂飞试验、地面电信号模拟和计算机仿真等,仿真与试验误差控制在1%以内[20]。
“火星极地着陆器”着陆失败原因可能是宽波束雷达性能受到着陆姿态和地形地貌的影响,在地面测试时使用了错误的验证模型。为此“洞察号”建立雷达高可信模型,包括硬件、软件和影响精度的环境效应并开展降落试验,而且EDL系统算法能容忍模型的误差,特别是验证着陆雷达数据有效性,并能够处理未融合到模型中的质心偏差、降落伞动力学等。EDL系统仿真采用修正的表面散射模型,分析结果表明,雷达在表面散射特性变化很大的情况下仍能可靠工作[21]。此外,仿真发现着陆雷达在防热罩分离时存在距离模糊问题,通过采取增加脉冲重复频率和修改雷达启动搜索时序等方法予以纠正,并通过直升机挂飞试验验证,确保了着陆成功[22]。“凤凰号”着陆过程中,着陆雷达首次捕获的高度与IMU相差1 300m,这充分体现了着陆雷达的重要性。图3显示“凤凰号”着陆雷达天线(中央8块方形橙色部分)。
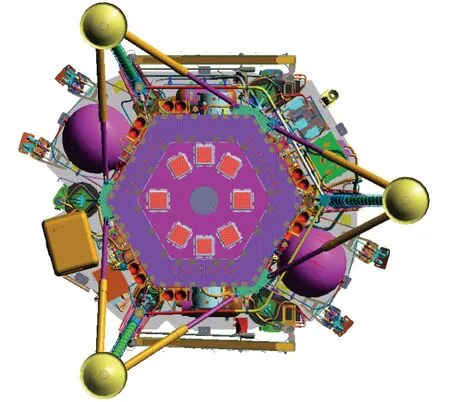
图3 “凤凰号”着陆雷达天线Fig. 3 Comparison of the altitude measurement results from landing radar and IMU
着陆雷达成功应用于月球和火星探测器,测量精度从4%提高到2%,功耗从95W降低35W,体积缩小3倍,但这些着陆雷达工作在微波波段,雷达波束宽度较大,难以满足精准着陆和避障要求,需采用毫米波着陆雷达。
2 毫米波雷达
毫米波雷达(Millimeter-wave Radar),是指工作波长介于1~10mm的雷达。毫米波雷达有更窄的波束,可提高雷达的角分辨能力和测角精度,并且有利于抗电子干扰、杂波干扰和多径反射干扰等。由于工作频率高,可获得大信号带宽和多普勒频移,有利于提高距离和速度的测量精度和分辨能力。此外毫米波雷达具有可全天候工作,穿透能力强的优点,可在雨、雪、雾霾、沙尘暴等恶劣气候下工作。与微波雷达相比,毫米波雷达体积小、质量轻,但探测距离等性能有所下降。
MSL采用进入升力控制和空中吊车着陆方式,着陆误差圆半径从“海盗-1号”的140km缩小到10km,对着陆精度和高度要求更为苛刻。EDL系统要求终端下降传感器(Terminal Descent Sensor,TDS)至少用3个波束测量速度,精度优于0.25%,在所有速度波束上实现高精度斜距测量,同时需满足着陆器严酷的动力学特性要求,包括高姿态偏差和机动速度。MSL速度测量精度比“海盗-1号”Ku波段速度计提升 5倍,达到 cm/s[23],这就要求着陆雷达采用创新型设计。为满足速度测量精度要求,TDS工作在Ka波段(35.75GHz),雷达天线波束宽度更小,并且有利于缩小天线体积和减小到达角误差,避免火星崎岖地形引入较大速度测量误差。TDS雷达共有6个波束,1个波束与探测器速度矢量轴平行,3个波束与垂直轴夹角是20°,沿着方位向均匀分布;2个波束沿着对地轴倾斜50°安装,每个波束沿着方位向旋转 30°。波束分布方案可保证着陆器分离后视场能覆盖火星表面并能获得速度信息。每个波束独立工作且按设定顺序进行时分复用,避免出现失锁问题。
与传统脉冲多普勒雷达相比,TDS创新点在于当距离和速度信息未知且波束之间信息未共享的情况下,可实现自动灵活选择雷达工作参数,包括脉宽、脉冲重复间隔、脉冲对隔离和测量灵敏度等。TDS的“无记忆”特性,使得着陆雷达在每次测量过程中各个波束能重新捕获目标,避免之前高度计设计中存在的距离模糊和高动态问题以及热屏蔽罩引发错误锁定等,剔除偶然错误测量结果,有助于提高着陆的可靠性[24]。
TDS雷达由天线与收发模块组件、射频电子学和数字电子学三部分组成[25]。射频部分由上/下变频组件、频率综合器、功率分配/合成器和收发组件组成,通过电缆与波导缝隙天线及滤波器相连。数字电子学采用Vertex-II FPGA和SPACR处理器实现射频电子学的时序控制、雷达回波数字化及处理和目标判断等功能。采用高速信号处理技术,在50ms时间内完成6个波束信号处理,每个速度波束可在高速运动下完成速度和高度的高精度测量。
为实现最小测量高度10m,测距精度20cm,TDS雷达收发组件采用砷化镓单片微波集成电路技术,开关切换时间优于20ns,噪声系数优于9dB。由于雷达散射截面参数的不确定性,雷达接收机动态范围达到100dB。
作为全新设计产品,TDS雷达开展了仿真分析和飞行试验、系统试验相结合的验证。2012年8月6日,MSL着陆过程中6个波束的高度和速度如图4所示,其中箭头所指测量目标是防热罩,由于TDS采用“无记忆”设计,不会导致错误锁定,EDL软件很容易剔除该测量结果。
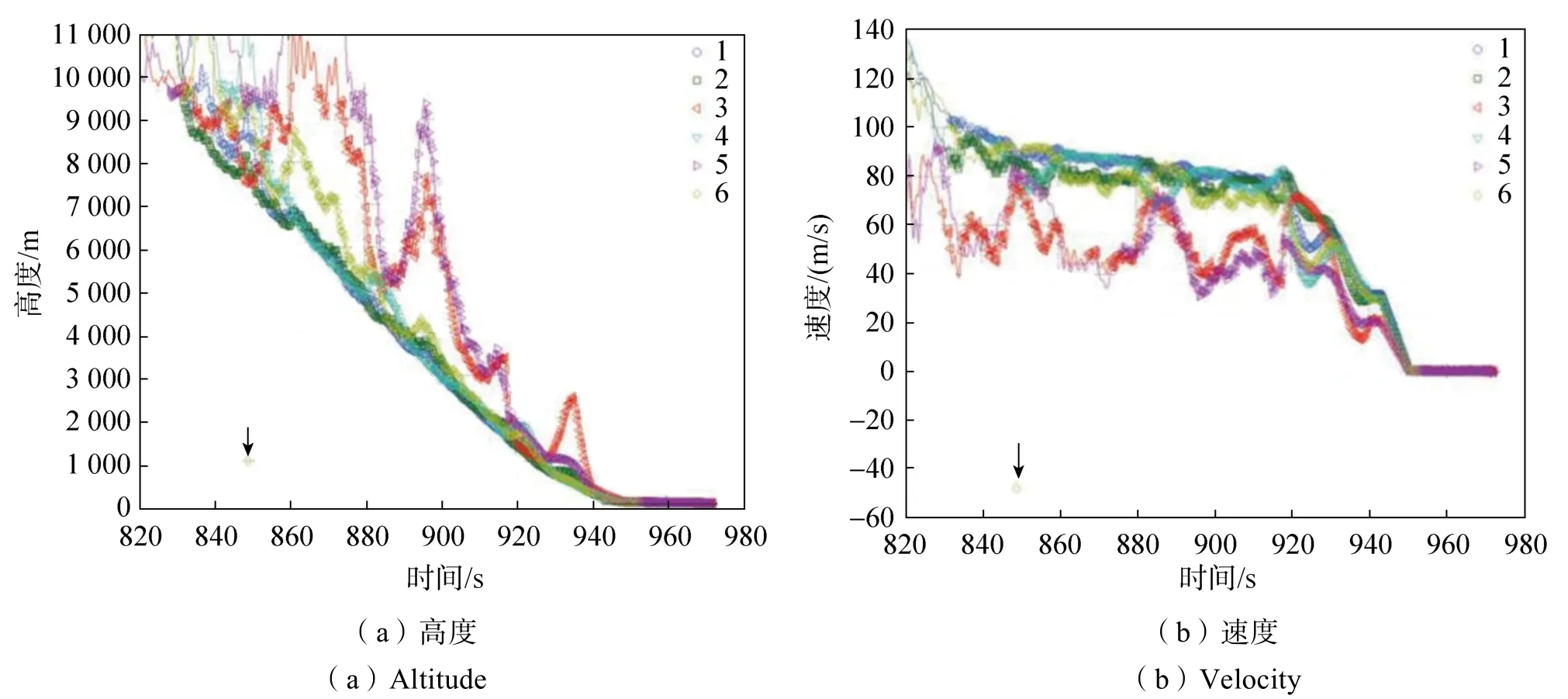
图4 着陆雷达测量的高度和速度Fig.4 Plots of the TDS-measured altitude and velocity
TDS着陆雷达的“无记忆”设计方法也应用于“火星生物学-2016”,由4个Ka波段雷达波束轮流测量高度和速度,通过灵活选择脉冲宽度和脉冲重复间隔等参数,结合高精度信号采集和高速数字信号处理技术,实现在10m~6 500m高度范围内高度和速度测量精度均优于0.5%[26]。在超声速降落伞减速阶段,着陆器振动量级超出 IMU设计上限,直接导致着陆器对降落方向判断产生了约 165°的偏差,相当于底部防热罩调转165°指向朝天的状态。降落过程中雷达高度计工作正常,但测量结果被送入含有错误姿态参数的导航控制系统软件进行解算测量高度为负数,提前触发控制程序,最终着陆器以超过150m/s的速度撞击在火星地表,着陆失败[27]。
火星着陆雷达从早期C波段微波雷达,发展到最新的Ka波段毫米波雷达,如表3所示,测距精度从3%提高到0.5%,速度精度提高5倍,而体积和波束逐渐减小。为实现深空探测安全软着陆,实现更高精度,美国提出发展G波段着陆雷达技术[28]。

表3 火星着陆雷达性能指标Tab.3 Performance of the Mars Landing Radars
3 激光雷达
激光雷达(Laser Radar)是采用激光器作为辐射源的雷达,是激光技术与雷达技术相结合的产物。激光雷达具有可准确获取目标的三维信息、分辨率高、抗干扰能力强等优点,但激光光束穿透能力在雨雪雾等极端天气下性能下降,而且计算数据量大需要高性能处理器。由于激光雷达可以形成高精度三维地图,因此在无人驾驶、自动着陆、自主避障系统中具有重要作用。
深空探测器距离远,为提高着陆器在危险着陆区域的生存能力,要求着陆器能够自主完成障碍检测和相应的规避控制。激光雷达具有体积小、精度高的特点,可生成三维地形,更直接地描述了目标区域的地形起伏和特征细节,实时自主检测障碍。
基于测距原理的激光雷达应用于月球、火星和小行星的地形探测和地质学研究,生成高精度地形图,包括火星全球勘探者的MOLA[29]、“月亮女神号”月球探测器上的LALT[30]、“嫦娥一号”的LAM[31]、“月球勘测轨道飞行器”的LOLA[32]、“月女神二号”的LIDAR[33]、OSIRIS-Rex的OLA[34]等。激光雷达不仅用于测量距离变化和表面粗糙度,建立品质和表面模型,还用于着陆过程的控制和导航。
首次采用激光雷达技术在轨实施自主避障的是“嫦娥三号”探测器,其激光雷达基于脉冲测距原理[35],采用1 064nm半导体泵浦激光器设计四路测量通道,实现着陆器不同姿态下 15m~30km范围内0.2m测距精度。通过采用多点扫描成像体制和全光纤激光器,利用二维扫描测量方式获取斜距信息并经过拼接处理实现三维成像,成像精度15cm。在“嫦娥三号”着陆过程中,在12km高度引入激光雷达[36],并利用三维成像敏感器对着陆器下方约 50m×50m区域进行高精度三维成像,通过数据图像处理,精确识别了障碍,确定安全着陆点[37]。
“隼鸟二号”小行星探测器在向小行星“龙宫”抵近过程中,采用激光雷达测量飞行器距离行星表面高度,由光学相机测量姿态,实现在轨三维导航。激光雷达由1 064nm YAG激光器、接收机和数字控制器组成。EDL系统要求激光雷达测量范围覆盖 30m~25km,精度 1m,为此采用近距离和远距离两套激光接收系统,如图5所示,并引入自动增益控制功能以弥补APD探测器动态范围不足的问题。在姿态控制计算机控制下,激光雷达实现发射激光脉冲重复频率和数据更新率最高达到1Hz。
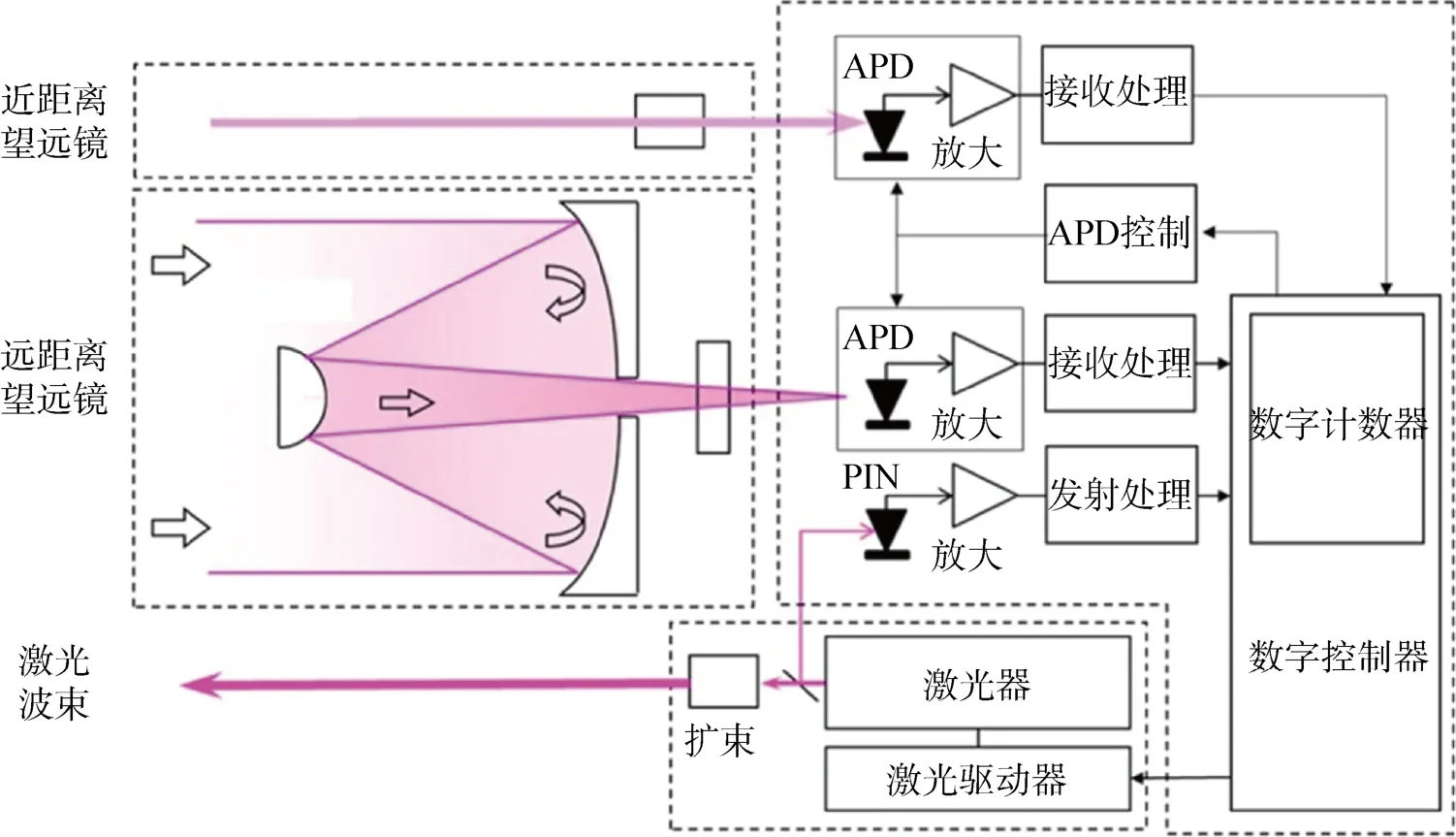
图5 “隼鸟二号”激光雷达系统组成Fig.5 Hayabusa2 LIDAR system block diagram
首台在轨应用的扫描类型激光雷达成功应用于测量OSIRIS-Rex飞行器与小行星Bennu表面的距离及速度变化,见图6。如果实际测量结果超出预期则飞行器逃逸行星表面,保证安全着陆[38]。Europa着陆器将采用扫描激光雷达、光学相机和惯性测量单元实现地形相对导航,激光雷达可在500m高度2s内完成3D数字高程模型,选择安全着陆点[39]。
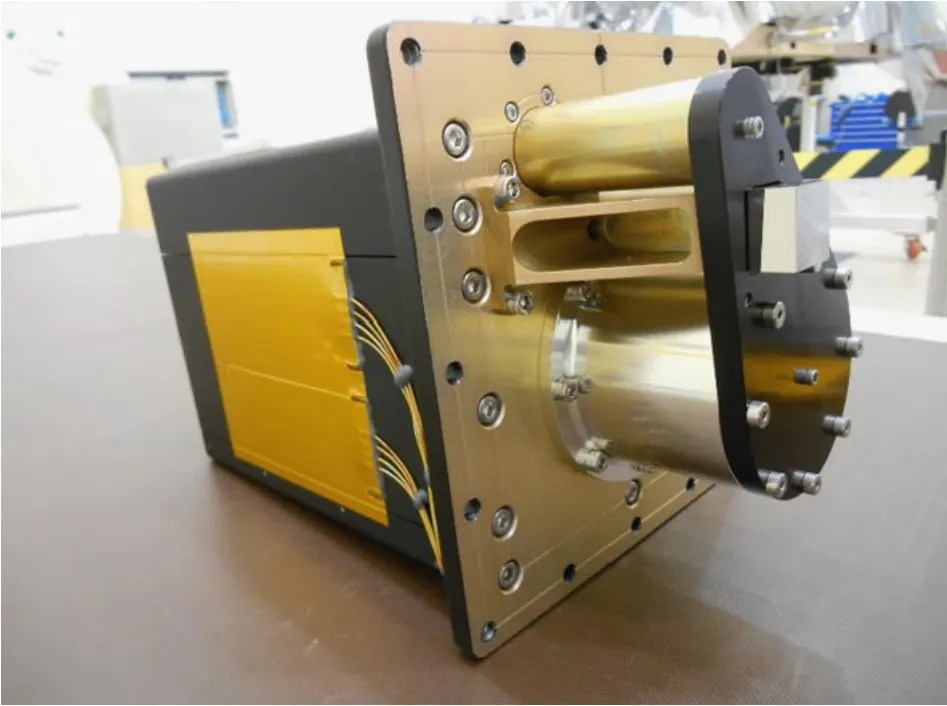
图6 OSIRIS-Rex激光雷达飞行产品Fig.6 A flight OSIRIS-Rex lidar
NASA为确保载人登月安全,研制的快闪激光雷达可在运动状态下对目标地形进行高精度三维成像,在斜距1km处识别出30cm障碍,精度达到8cm,是正在发展的主要激光着陆雷达技术[40]。
4 着陆雷达技术发展趋势
(1)毫米波/太赫兹等新技术应用
从双子星座计划、勘察者计划到阿波罗计划,雷达高度计和多普勒雷达在NASA深空探测中发挥着至关重要作用,从早期的辅助跟踪,发展到与地基雷达联合测量,到后来着陆雷达、散射计、交会对接雷达等多重功能。ESA针对火星着陆任务,提出利用毫米波相控阵雷达进行障碍检测和导航测量。在合成孔径、多普勒锐化等技术基础上发展稀疏目标超分辨成像方法,采用卷积反演实现前视成像,满足自主着陆、精确制导等应用需求。此外太赫兹波(THz)的频率高、波长短,相比于毫米波和微波,可实现大带宽与窄天线波束,在微小目标探测和雷达成像具有明显的优势,满足深空探测着陆雷达高精度、小体积的需求。
(2)多体制雷达信息融合,功能更为完备
日本月球着陆巡视器“月亮女神二号”、印度“月船二号”和ESA探月任务为实现安全软着陆,均开展障碍探测与规避技术研究,利用微波和激光雷达高度计和多普勒雷达测量高度和速度,利用成像激光雷达对着陆点附近进行扫描成像,并结合光学相机实现避障并自主选择安全着陆点。
光学相机对光照条件要求较高,而且图像数据处理计算量大,难以满足导航避障实时性要求。毫米波雷达波束辐照特点允许探测器在很高高度获取火星地表的高程和粗糙度信息,突破了激光雷达的作用距离限制,但同时也带来了新问题,即波束宽度大,分辨率较低,无法用于检测岩石等小尺寸障碍。激光雷达可直接获取着陆点高分辨率三维地图,精度高而且不受光照影响,但视场和作用距离受限。在未来着陆下降、障碍规避过程中,毫米波雷达、光学相机、激光雷达的信息融合具有广阔的应用前景,不仅能够测量着陆导航信息,结合机器学习、人工智能等算法可实现故障容错/纠错、障碍规避、科学观测。
(3)自主着陆障碍规避技术
虽然美国多次成功着陆于火星,日本也将“隼鸟号”探测器成功着陆于Itokawa小行星上,由ESA发射的“菲莱号”探测器成功着陆于丘留莫夫-格拉西缅科彗星上,然而这些探测器均不具有自主规避障碍功能,也没有在轨实时评估着陆区域安全性的能力。采取自主着陆障碍规避技术,不仅能极大降低着陆失败的概率,减小着陆误差椭圆半径,同时也会增加着陆器可探测天体的区域。另一方面,为了确保载人月面着陆安全,NASA开展ALHAT项目,以实现“识别不小于0.3m的月岩和不小于5°的斜坡,在任意光照条件下安全精确地着陆于月面任何地点”的目标。采用了多普勒激光雷达、激光高度计以及快闪激光雷达,可以在运动状态下对目标地形进行高精度三维成像。为了增加科学回报,提高任务成功的几率,未来的深空探测器着陆雷达必须具备避障能力。
5 结束语
自主障碍检测与规避是未来无人探测器和载人飞船采样返回和精确着陆任务的一项必需技术。雷达,作为深空探测器EDL系统的核心与关键仪器,承担着高度、水平速度、垂直速度、障碍物等信息测量任务,是安全着陆过程的重要保障。
微波雷达以及毫米波雷达,不仅可实现长量程、高精度的高度测量,基于脉冲多普勒测量体制还能测量深空探测器的水平与垂直速度。无论是阿波罗载人登月工程、嫦娥工程以及火星着陆器,还是NASA最新研制的猎户座载人飞船、月球轨道空间站均采用雷达高度计和多普勒速度计,工作频率从早期的 C波段发展到Ka波段,测量精度逐渐提高。NASA提出研制W波段、G波段雷达,以及与激光雷达融合的一体化敏感器。
与微波雷达相比,激光雷达测量范围小,但体积小质量轻,而且测量精度高,在火星、小行星探测中获得广泛应用。特别是激光雷达可实现对目标精确测量和 3D点云成像,将在着陆导航、避障、科学探测中发挥重要作用。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
农业工程学报(2022年4期)2022-04-24
国际太空(2021年8期)2021-11-05
汽车观察(2021年8期)2021-09-01
舰船电子对抗(2021年2期)2021-06-16
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
伙伴(2019年12期)2019-01-17