
新型复合式水下机器人设计研究
2020-09-21 08:48辛光红周密杨波丁学用
现代电子技术 2020年17期
辛光红 周密 杨波 丁学用


摘 要: 新型水下機器人是在远程遥控水下机器人ROV、自主航行水下机器人AUV、水下滑翔机AUG的基础上提出的全新融合体,兼顾了ROV,AUV,AUG的优点(简称ARG),其由上位机地面站和ARG本体组成。地面站由OpenWrt路由器、MCU、PC、电力载波模块、高清显示屏、工控屏和移动终端组成。ARG本体由水动力外壳、净浮力装置、重心调节装置、水平推进动力系统、电源系统、通信系统、传感器系统、视频采集系统组成。地面站与ARG之间的信息通信方式有电力载波、WiFi、GSM通信。ARG本体通过重心调节装置、净浮力调整装置和水平推进动力系统,实现全自由度运动、定深悬停及无动力滑翔。结合GPS定位和上位机软件,ARG具有航迹规划、航迹显示、采集信息及航行日志输出等功能,图像采集系统可实现4K高清实时采集传输。
关键词: 水下机器人; 外形设计; 抗压设计; 控制系统设计; 图像实时传输; 地面站设计
中图分类号: TN98?34; TP24 文献标识码: A 文章编号: 1004?373X(2020)17?0180?03
Abstract: The new underwater vehicle is an entirely new fusion body designed based on the remotely operated vehicle (ROV), autonomous underwater vehicle (AUV), and autonomous underwater glider (AUG). It combines the advantages of ROV, AUV and AUG, which is named autonomous remotely glider (ARG) for short. The designed vehicle is composed of upper computer ground station and ARG body, in which the former consists of OpenWrt router, MCU, PC, power carrier module, HD display screen, industrial control screen and mobile terminal, while the later consists of hydrodynamic enclosure, net buoyancy device, center of gravity adjustment device, horizontal propulsion power system, power supply system, communication system, sensor system and video acquisition system. The information communication modes between the ground station and ARG include power carrier, WiFi and GSM communication. The ARG body achieves full freedom motion, fixed depth hover and non?powered glide by the center of gravity adjustment device, net buoyancy adjustment device and horizontal propulsion power system. Integrated with GPS positioning and upper computer software, ARG has the functions of track planning, track display, information collection and navigation log output. The image acquisition system can realize 4K HD real?time collection and transmission.
Keywords: underwater robot; shape design; compression resistance design; control system design; image real?time transmission; ground station design
0 引 言
随着现代社会的迅猛发展,人类对于资源、空间的要求越来越高,消耗的自然资源也随之越来越多,陆地早已不能再满足人类社会发展的需求。在地球上,陆地不比海洋,海洋的总面积达到了3.62亿平方公里,占地球总面积的71%,平均深度[1]约3 820 m。同时,在广阔的海洋中蕴藏有各种丰富的海洋生物资源、海洋矿产资源以及海洋能源。中国作为海洋大国,拥有32 000 km的海岸线和300 km×104 km以上的管辖海域。因此,开发海洋资源、保护海洋环境、维护海洋权益、海洋科考及预报,对中国的经济发展与国防安全都具有重大意义[2]。
在海洋开发、环境保护及海洋军事等领域,水下机器人占据了极为广阔的应用前景。水下机器人作为最主要的海洋装备,对其进行深入研究也成为发展海洋开发技术的重要手段。习总书记也先后在全国科技创新大会、两院院士大会上相继提出了“要向海洋要资源、向深海要资源”的号召。海南省是国家“一带一路”战略的重要支点,海南省在“十三五”规划中也明确指出了会发展海南的特色经济,重点在于发展海洋旅游、海洋油气、海洋运输、海洋装备制造等海洋新型产业。海南省海洋资源丰富,岛内河流密集,因此,在海洋环境监测、海底生态保护、海洋旅游服务、河流水库治理等方面,合理利用水下机器人是具有积极意义和广阔市场应用前景的[3?4]。
1 新型水下機器人系统设计
新型水下机器人是远程遥控水下机器人(Remotely Operated Vehicle,ROV)、自主航行水下机器人(Autonomous Underwater Vehicle,AUV)、水下滑翔机(Autonomous Underwater Glider,AUG)的全新融合体,其兼顾了ROV,AUV,AUG的优点,故称为ARG(Autonomous Remotely Glider)。ARG具有机动性强、航程大、多端控制等特点,可实现一机多用,根据不同工作环境采用不同的工作模式。
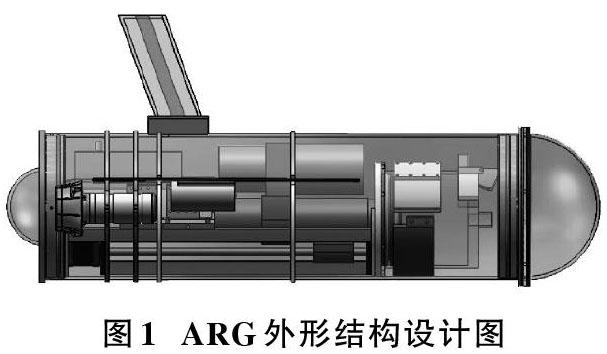
1.1 结构外形设计
ARG的结构外形如图1所示。为了克服水阻力,ARG采用流线型设计,用净浮力调节装置代替竖向推进器,可实现悬停、低能耗的工作且无泥沙绕动。在ARG两侧增加机翼,可减轻水平推进器产生的水阻力,抗水浪、水流能力也有提升,从而提高ARG的横纵稳定性。采用重心调节装置改变ARG的俯仰角,配合净浮力调节装置和水平推进器实现快速上浮下潜运动[5]。
1.2 抗压水密性设计
工程结构设计中用于反映结构安全程度的系数称为安全系数。安全系数的确定需要考虑荷载、材料的力学性能、试验值和设计值与实际值的差别、计算模式和施工质量等各种不定性,其计算公式为:
本系统采用软件Solidworks中的Simulation功能对ARG中各个主要受力部件进行应力分析,分析结果如表1所示。
ARG水密性设计主要采用O型圈密封方式,O型圈选型依据GB/T 3452.1—2005,O型圈的压缩率[W]通常用下式表示:
式中:[d0]是O型圈在自由状态下的截面直径(单位为mm); [h]是O型圈槽底与被密封表面的距离(单位为mm)。
ARG的密封对于ARG的电子器件乃至整个ARG系统来说都很关键,ARG的密封问题是所有问题中出现几率最高的。本文设计的ARG需要密封的地方有耐压舱体与前透明导流罩的密封、耐压舱体与后盖密封、耐压舱体与水下推进器的密封、耐压舱体与水密插头的密封。
1.3 控制系统设计
ARG整体设计方案结构图如图2所示。ARG具有有缆与无缆两种工作方式:有缆模式下,ARG动力由脐带缆提供,控制台利用脐带缆通过电力载波传递数据与视频;无缆模式下,当ARG浮上水面时,上位机可通过WiFi,GSM两种通信方式与ARG传输数据指令,使ARG完成一系列动作。在ARG内部主要有运动控制系统、通信系统、传感器系统、图像采集系统、电源系统。
ARG内部电子控制系统结构如图3所示。传感器系统中,由MPU 9250姿态传感器可实现姿态惯导,GPS与压力传感器实现定位定深;运动控制系统中主要由净浮力调节系统、重心调节系统和推进器组成,通过其间相互配合可完成上升、下潜、悬停、无动力滑翔等一系列动作;通信系统中主要有交流电力载波、WiFi和GSM 3种通信方式;图像传输系统利用高清数字压缩技术结合电力载波实现4K高清图像实时传输[6]。
1.4 图像实时传输设计
ARG艏艉部各有1个摄像头,其中艏部是4K高清摄像头,在有缆模式下通过电力缆实时传输4K高清图像,让地面操作者更清晰地观测海底环境,方便操作者操控ARG在水下工作。艉部是1个720P的高清摄像头,用于ARG的空间定位,操作者通过观察艉部摄像头可以更直观地感知ARG所处位置、方位。
艏部4K高清摄像头输出的HDMI(High Definition Multimedia Interface)信号,通过HDMI转网络传输器,利用H.264 High Profile高清数字视频压缩技术结合电力调制技术实现4K高清图像实时传输[7]。艉部高清摄像头将视频流通过OpenWrt路由器输出TCP/IP视频流,通过电力载波传输至地面站显示端。其原理结构如图4所示。
2 地面站及上位机设计
2.1 地面站控制台设计
地面站控制台如图5所示,主要由OpenWrt路由器、MCU、PC、电力载波解调模块、高清显示屏、工控显示屏和移动终端组成。控制台负责对下位机发送指令、显示下位机所传输的图像以及接收下位机的数据[1]。下位机采集数据后经电力载波调制模块调制再通过电力线传输到地面站的电力载波解调模块,经解调后通过网络线传输到OpenWrt路由器,路由器通过TCP/IP协议将高清图像传输到网络延长器接收端,再通过HDMI线连接高清显示屏并显示。同时,地面上的PC端、移动终端、控制箱的MCU也通过TCP/IP协议连接OpenWrt路由器并接收来自下位机的数据,再由工控显示屏显示相关数据[8]。地面站的指令可通过控制台和移动终端通过OpenWrt路由器和电力载波模块传送到下位机的通信模块,再由其他模块执行指令。
2.2 上位机设计
上位机系统基于Microsoft Visual Studio是在Microsoft.NET平台上编写的。该系统具有RS 232通信、TCP/IP通信功能,能满足ROV和AUV的控制和调试需求。应用内嵌有在线地图,通过API接口的方式与服务器进行数据交互以实现定位的功能。应用窗体可接收、处理、显示和保存下位机回传的传感器数据,还可以显示实时视频、以3D模型展示设备三维姿态,其控制面板如图6所示。
3 结 语
本文对各系统与基础模块进行了实验测试,验证了各单元的可靠性,对ARG整体进行水池测试,完成一系列给定动作,验证了设计的可行性。经室内水池实验测试,本系统完成了全自由度运动控制测试、通信系统测试、传感器系统测试,基本达到预期设计目标[9]。运动控制算法还需优化,其中能量和时间双重约束下的最优路径运动算法是后期改进的重点与难点。
参考文献
[1] 徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125?132.
[2] 李哗,常文田,孙玉山,等.自治水下机器人的研发现状与展望[J].机器人技术与应用,2007(1):25?31.
[3] 彭学伦.水下机器人的研究现状与发展趋势[J].机器人技术与应用,2004(4):43?47.
[4] 任福君.水下机器人的发展现状[J].佳木斯大学学报(自然科学版),2000,18(4):317?320.
[5] 辛光红,范瑞峰,陈小虎,等.一种水下潜器浮力调节装置:CN201710245529.3[P].2017?08?04.
[6] 王洪达.混合驱动水下机器人控制系统设计[D].天津:天津大学,2010:22?23.
[7] 李建.浅谈高清数字电视视频压缩编码技术[J].西部广播电视,2014(17):189.
[8] 于海斌.海洋强国需要水下机器人[J].机器人产业,2017(1):42?45.
[9] 张震,曾庆军,戴晓强,等.遥控水下机器人用户操作软件设计[J].电子设计工程,2019,27(1):31?36.
猜你喜欢
军事文摘(2022年24期)2022-12-30
科教新报(2022年24期)2022-07-08
科教新报(2021年23期)2021-07-21
家庭影院技术(2019年4期)2019-04-17
大众用电(2018年7期)2018-04-12
西部广播电视(2015年10期)2016-01-18
新媒体研究(2015年7期)2015-12-19
电测与仪表(2014年15期)2014-04-04
华东理工大学学报(自然科学版)(2014年2期)2014-02-27
发明与创新(2013年34期)2013-03-11
