
Tomo-PIV亚跨声速风洞应用探索
2020-09-21 02:55:40李晓辉王宏伟
实验流体力学 2020年4期
李晓辉, 王宏伟, 张 淼, 黄 湛,*
(1. 中国航天空气动力技术研究院, 北京 100074; 2. 中国商飞上海飞机设计研究院, 上海 201210)
0 引 言
粒子图像测速(Particle Image Velocimetry, PIV)作为一种非接触式的全场速度测量技术[1-2],能够实现低速到高超声速的流场切面测量,极大地促进了流体力学的发展和型号的工程应用。但是,PIV只能实现流场的二维切面测量,对于复杂三维非定常流动问题则需要在全局体空间内进行流场特性研究,以捕捉其三维流场结构。
Tomo-PIV是一种新近发展的3D3C非接触全场速度测量技术,具有强大的三维流场测量能力,受到了国内外的广泛关注,在流体力学研究中的应用不断增加,已经被用于湍流边界层和激波边界层相互作用、尾流和流动控制等具有强三维性、强非定常性流场的空间测量。国外对该技术的研究已经取得了相当多的成果,风洞研究涵盖了低速、亚声速、超声速和高超声速。Elsinga等[3-4]利用Tomo-PIV开展了一系列的湍流边界层试验研究,发现对数区内不对称的发卡涡占据主导地位,伴有一些马蹄形涡,过渡区内以弓形涡和马蹄形涡为主。Pitiers大学的Thomas等[5]进行了喷气机横流的试验。Scarano等[6]利用时间解析的Tomo-PIV技术对2种喷嘴结构的喷管出口射流场进行了试验研究。Violato等[7]通过时间解析的Tomo-PIV测量了从圆形和V形射流出口喷出的射流转捩过程,研究了三维转捩模式及其对噪声产生的影响。Humble等[8]对来流Ma=2.1的激波边界层干扰进行了测量,获取了高低速流动区域的相互作用及激波边界层干扰的拓扑结构。Ye等[9]对来流Ma=6.5的带斜劈的平板边界层流动特性进行了研究。国内对该技术的研究起步较晚,目前仅在低速水洞和低速风洞中实现了初步应用。天津大学的唐湛棋等[10]利用时间解析的Tomo-PIV技术研究了水槽中湍流边界层流动的拟序结构。北京航空航天大学的高琪等[11]利用自主研发的层析PIV技术实现了合成射流的三维测量;中国航空工业空气动力研究院的许相辉等[12]利用Tomo-PIV技术在低速风洞中测量了圆柱的尾流场,观测到了圆柱体后方的三维卡门涡结构。但是,由于Tomo-PIV技术使用的相机个数较多(一般为3~6个),光路设计较为复杂,具体到风洞应用时更为困难,因此,目前国内尚未见到Tomo-PIV在亚跨超以及高超声速风洞中的应用。
本文以Tomo-PIV技术作为研究手段,针对超临界翼型OAT15a,在中国航天空气动力技术研究院FD-12亚跨超声速风洞中开展了Tomo-PIV的应用研究,包括粒子的播撒和相机激光器等硬件设施的布局等,测量Ma=0.6来流条件下空流场的三维分布,并与二维PIV进行对比。在此基础上,测量来流马赫数0.6和0.7条件下翼型表面贴附光膜和顺流向对称V形小肋薄膜之后翼型尾缘后方的三维速度场,进行了小肋减阻被动控制技术的试验验证。
1 试验技术及应用难点
1.1 Tomo-PIV技术简介
Tomo-PIV是将PIV技术和CT重构技术相结合形成的一种三维流场速度测量技术,能够实现空间流场的全场定量测量,测量原理如图1所示。利用高能量的激光脉冲照射测量区域,向流场中播撒一定浓度的示踪粒子,同时使用多个(一般为3~6个)相机记录粒子运动图像,利用倍增代数重构算法(MART)对三维空间粒子分布进行迭代重构,然后对相邻曝光间距的2个三维重构体进行三维互相关(Cross-correlation),获取粒子的位移信息,再除以曝光时间Δt即可计算出速度场。

图1 Tomo-PIV技术原理图
1.2 Tomo-PIV技术应用难点
Tomo-PIV在低速水洞和低速风洞中已进入初步应用阶段,但在亚跨超及高超声速风洞的应用目前国内还未见报道。二维PIV通过片光照明、单相机成像,获取二维平面内的两分量速度场;Tomo-PIV通过体激光照明、多台相机成像,获取三维空间内的3个速度分量。因此,相对于二维PIV,Tomo-PIV应用带来了更多需要解决的问题。
Tomo-PIV系统复杂,光路设计困难。Tomo-PIV需要多相机拍摄流场,因此需要尺寸较大的观察窗,使所有镜头均能拍摄到模型有效区域,多台相机空间视野对齐的效率和精度也需要提高。此外,流场照明为体状光源,所需要的设备布局空间较大,且激光的照明路线和相机的拍摄方向也需要进行完备的设计。因此整个系统的布置对风洞试验段有一定的要求,而国内现有的风洞没有专门的特种光学试验段,对于实现三维复杂流场测量所需要的特种光路有很大的困难。
示踪粒子的选择和播撒是Tomo-PIV面临的又一个问题。Tomo-PIV根据拍摄的示踪粒子图片反衍计算出流场速度分布,因此示踪粒子的选取是试验至关重要的一个方面。示踪粒子需要在保证跟随性的同时有足够的散射光强,使得图像具有较高的信噪比,而在PIV试验中这两者是相互矛盾的,因此需要平衡两者,选择一个合适的示踪粒子种类和粒径,这个问题在Tomo-PIV中尤其突出。由于Tomo-PIV是一种三维流场测量技术,和二维相比,测量区域的激光能量会减弱十几倍甚至几十倍,导致粒子的散射光减弱,图像信噪比变低,影响后续的粒子重构质量和精度。
2 试验设备及方案
2.1 试验设备及模型
2.1.1 试验风洞
试验在中国航天空气动力技术研究院的FD-12亚跨超声速风洞中进行。FD-12为暂冲式亚跨超声速风洞,试验段截面尺寸1.2 m×1.2 m,总长3.8 m,为外圆内方的双层结构,外层(即驻室)内径为2.8 m,内层(即亚跨声速插入箱)进出口尺寸1.2 m×1.2 m,插入箱的上下壁是可调扩开角的开孔壁,左右壁为实壁。在试验段侧面分别设置有2套透光尺寸为Φ500 mm的观察窗,驻室顶部设有一个Φ450 mm观察窗。风洞及试验段外形见图2。

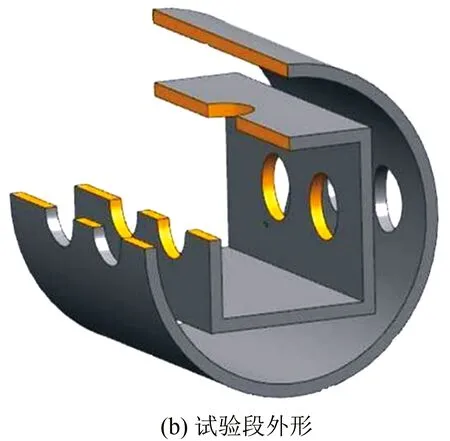
图2 亚跨声速风洞及试验段
2.1.2 试验模型
试验模型为超临界翼型OAT15a,整体采用3段式设计,每段长度300 mm,翼型弦长300 mm,展弦比为3∶1,整体通过侧窗机构支撑。控制中间段翼型与两侧模型间隙为1.5 mm,并使用单侧背胶海绵填充,降低缝隙流动的同时保证没有力的传递。

图3 翼型安装示意图


图4 小肋薄膜外形

表1 不同来流马赫数下对应的小肋无量纲尺寸
2.1.3 Tomo-PIV测量系统
使用北京立方天地有限公司的Tomo-PIV测量系统进行试验。其主要由图像采集系统、照明系统、同步控制系统及数据处理软件等组成。示踪粒子播撒系统由本课题组自主研发设计。
粒子图像采集系统由4台CCD相机组成,数字相机为IMPERX公司的跨帧相机,通过外部触发进行工作,1次瞬间捕捉2帧图像,同时将捕捉到的一系列图像数据通过图像采集板实时传输到计算机内存中,相机分辨率为2456 pixel×2058 pixel,配备PC-E Micro NIKKOR 85 mm f/2.8 D移轴镜头,具有一定的景深控制,能够实现一定厚度范围内体空间的流场拍摄。
照明系统主要由激光器和体光源组成。采用Nd: YAG双脉冲式激光器,输出波长为532 nm,单脉冲能量为250 mJ。图5为体光源结构示意图,体光源由激光扩束系统和平凹柱面镜组成。激光扩束系统原理示意图见图6,该系统包括1个平凹透镜和平凸透镜,主要有2个用途:其一是扩展激光束的直径;其二是减小激光束的发散角。扩束后的光束经过1个平凹柱面镜,使光束只在一个方向扩束,形成椭圆形截面的激光光源,在平凹柱面镜之后加入可调节光阑对体光源进行边界修正,以调节出所需要的体光源形状。

图5 体光源结构示意图

图6 扩束系统原理示意图
同步控制器通过内部时基产生周期的脉冲触发信号,经过多个延时通道同时产生多个经过延时的触发信号,用来控制激光器、数字相机和图像采集卡,使得激光器脉冲间隔与相机曝光时间协调匹配,同步控制器控制精度小于1 ns。
粒子播撒系统包括粒子播撒设备和示踪粒子。为适应亚跨声速风洞的粒子播撒,设计加工了基于流化床原理的固体粉末粒子发生器,破坏固体粉末的团聚作用,确保了粒子的跟随性。试验采用平均粒径为50 nm的TiO2作为示踪粒子,粒子浓度通过供气压力进行调节,播撒的粒子从喷管前段注入到风洞之中,在进入试验段之前混合均匀,示踪粒子浓度为0.06 ppp(partical per pixel)。
2.2 试验方案及布局
(1) 小肋薄膜贴附方案。图7所示为光膜及小肋薄膜布置方案。在上翼面距前缘10%的位置布置转捩带,转捩带前部和整个下翼面全部贴附光滑薄膜。测量光膜后方流场时,将转捩带之后的上翼面全部贴附光滑薄膜;测量小肋薄膜后方流场时,上翼面转捩带后布置小肋薄膜,与前者进行对比。
(2)示踪粒子播撒方案。设计并加工了高压流化床式纳米固体粒子发生器,主要由气流入口、减速增压段、粉末粒子混合段、对撞冲击段、分离筛选段和出口等部分组成,实现示踪粒子的充分掺混和破碎,最终筛选出满足试验需求的示踪粒子。配合该发生器设计加工了用于注入粒子的播撒架,如图9所示。在过渡段两侧风洞壁上均开了2个直径为50 mm的圆孔,播撒架和圆孔固定,在播撒架上均匀分布多个细小圆孔,示踪粒子从圆孔中注入到过渡段中,经过一定距离的掺混,使粒子均匀播撒于风洞试验段测量区域。

图7 光膜及小肋薄膜布置方案

图8 粒子发生器
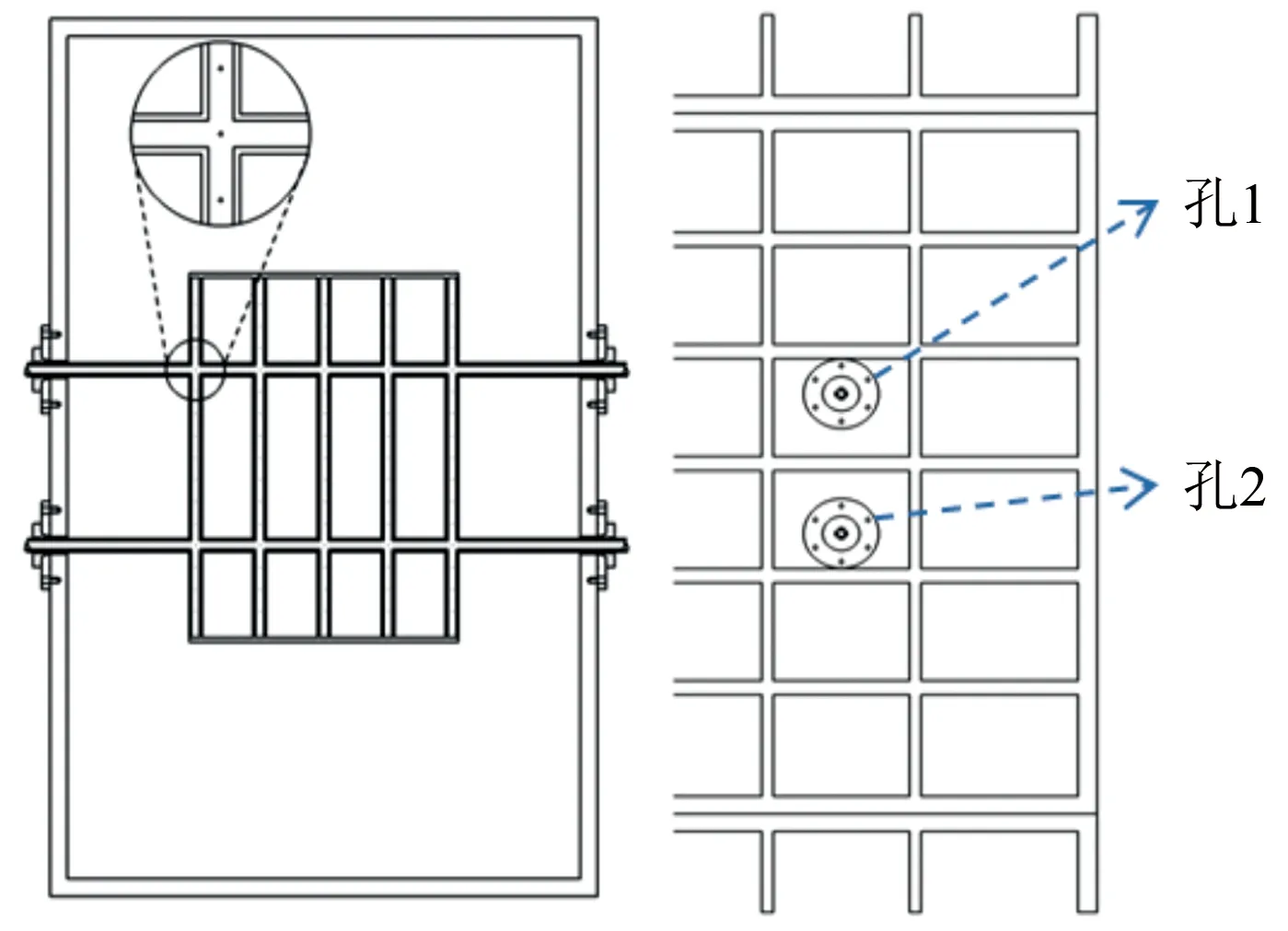
图9 播撒架及开孔位置
(3)试验整体布局方案。图10为试验布局示意图。使用4台CCD相机进行拍摄,相机固定在六自由度云台上,从驻室顶部窗口向下拍摄,通过调节云台改变相机的拍摄视角,使4台相机拍摄模型的同一区域;激光束经体光源装置形成边界规整的体状光源,从侧窗进行流场的照明,通过调节升降台和旋转台改变体光源的位置和角度,使光源照明试验拍摄区域。

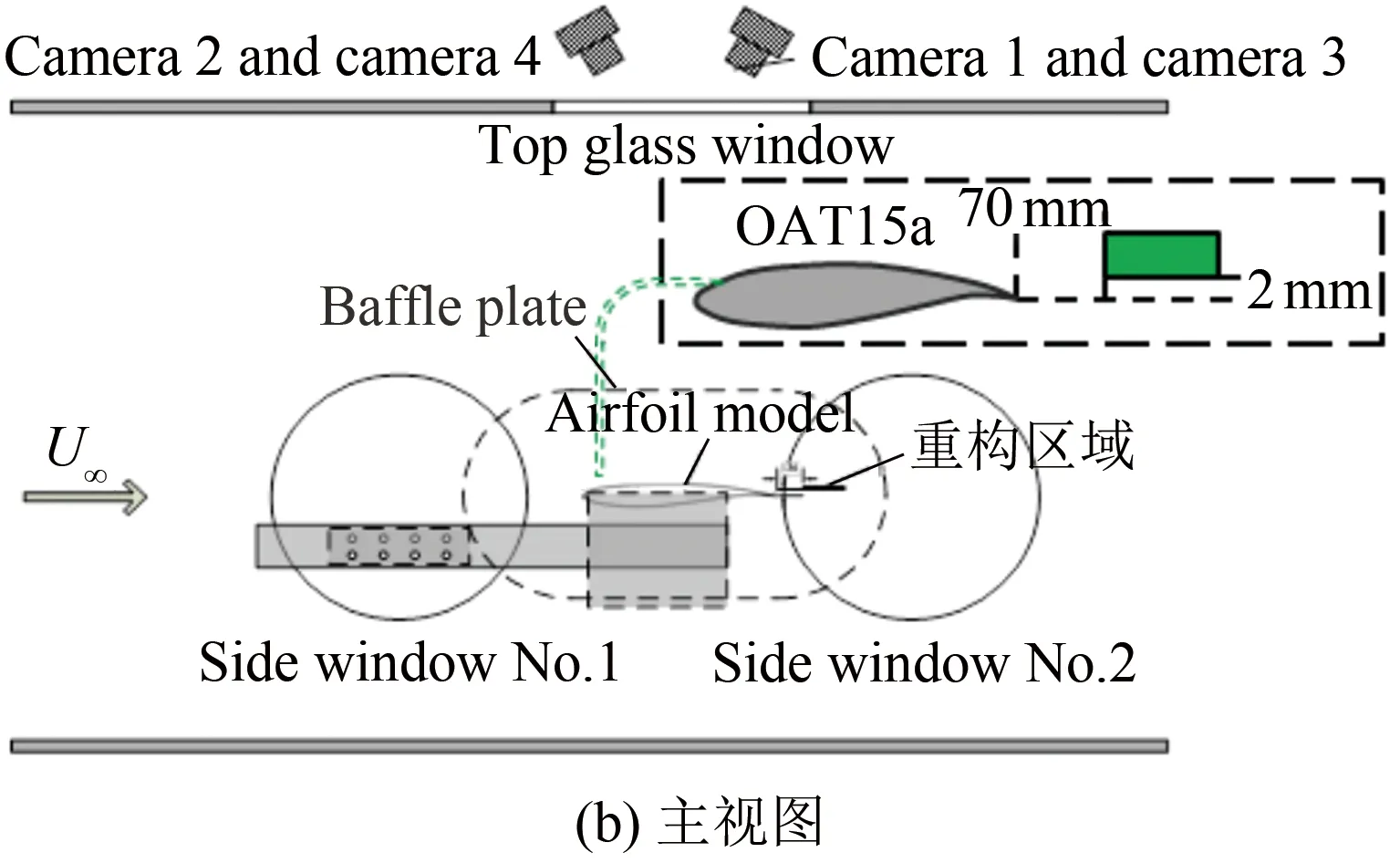
图10 试验布局示意图

图11 设备布置现场
3 试验结果及分析
小肋减阻试验主要针对模型0°迎角的工况进行对比测量,试验马赫数为0.6和0.7,采样频率5 Hz,拍摄区域左侧距离翼型尾缘70 mm,底部距离尾缘最高点2 mm,重构区域大小为45 mm(x)×30 mm(y) ×12 mm(z)(规定流向为x轴正方向,竖直向上为z轴正方向,y轴正方向由右手法则确定)。相机跨帧时间700 ns,对应马赫数下的粒子位移分别为5和6 pixel,分别采用SF-MART[13](Spatial Filtering MART)算法和互相关算法进行三维粒子重构和三维速度场计算,互相关迭代窗口为64 voxel×64 voxel×64 voxel,窗口重叠因子75%,最终采用的参数见表2。

表2 Tomo-PIV计算参数Table 2 Calculation parameters of Tomo-PIV
FD-12风洞为暂冲式亚跨超三声速风洞,总温在运行期间会发生比较明显的变化,而温度会影响到流场的速度值。单纯从速度场结果分析小肋薄膜减阻效果是不准确的,因此需考虑到温度和压缩性,将速度场结果结合来流总温条件,根据绝热假设计算流场的马赫数分布,并通过马赫数分布的比较来验证小肋薄膜的减阻效果。马赫数计算公式如下:
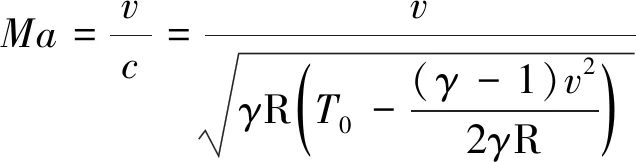
(1)
其中,v为测量速度,c为当地声速,T0为来流总温,γ为比热比,R为气体常数。
3.1 空流场结果分析
针对Ma=0.6条件下的空风洞试验段进行了试验测量,以此验证在该设备布局下Tomo-PIV的测量精度。图12和13分别为时间平均后的流场三维速度及三维矢量图分布,可以看出流场均匀性良好,速度矢量和来流方向一致。为了更加直观地分析流场稳定性,对试验结果作了进一步的处理。

图12 三维速度场分布

图13 三维速度矢量图
图14为二维截面与对应的三维流场截面速度云图对比,发现Tomo-PIV和成熟的PIV测试结果基本一致,均为185 m/s左右;此外,对三维速度场进行展向平均,并给出了y=15 mm处二维及三维对应位置平均速度沿流向的波动变化,如图15所示。可以看出,测量速度均围绕平均速度上下波动,Tomo-PIV测试结果的最大波动值为0.42 m/s,PIV测试结果的最大波动值为0.13 m/s,都显示出了较好的测量精度。试验结果不仅证明了Tomo-PIV的试验精度满足要求,还表明FD-12的流场品质符合国家相关规范要求,可以胜任型号试验。

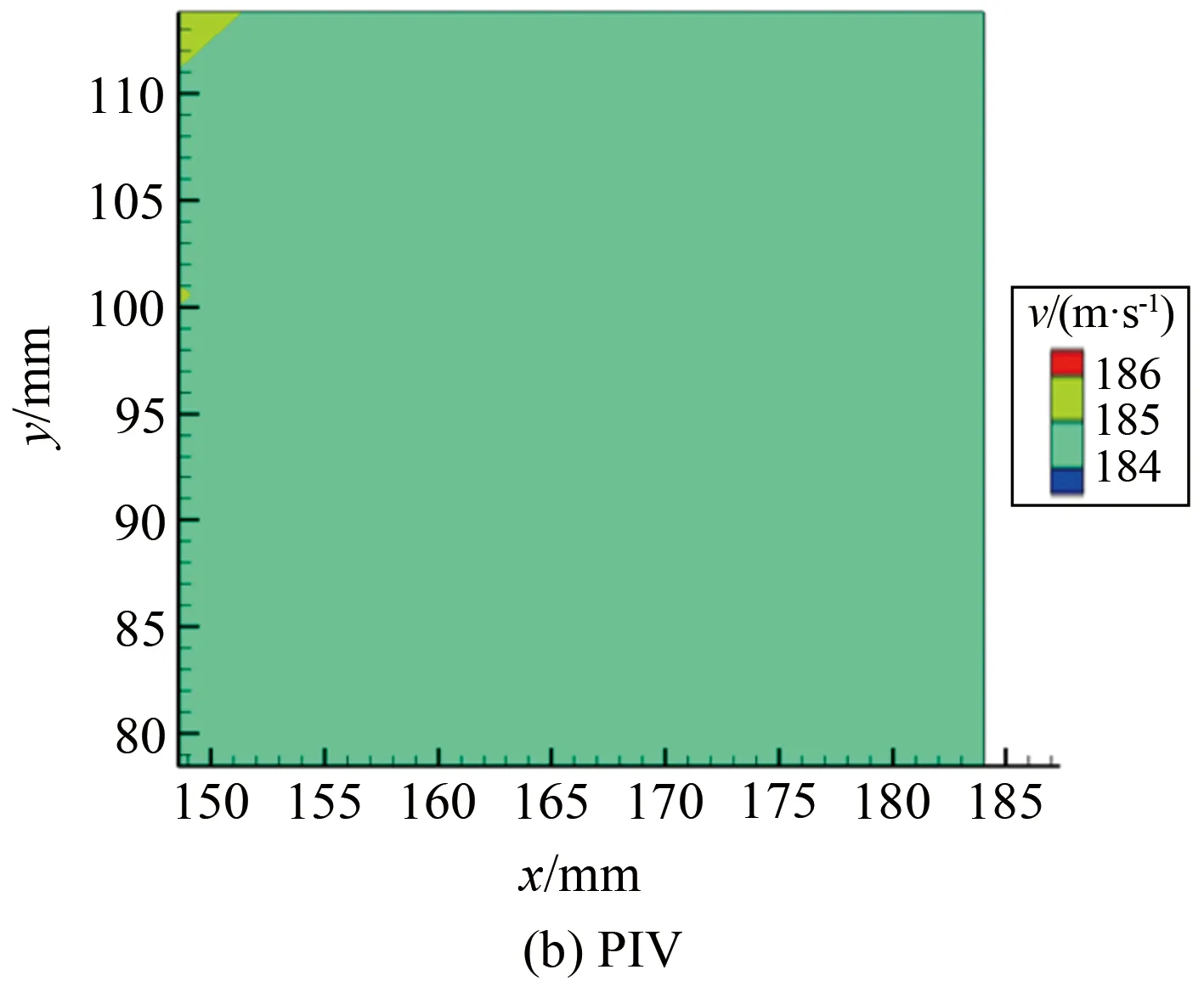
图14 截面速度云图对比

图15 速度波动
3.2 尾流场结果分析
图16~19分别为来流Ma=0.6和0.7时翼型表面贴附光膜和顺流向小肋薄膜之后的尾流三维速度分布图。可以看出,沿着流向流场马赫数逐渐增大并向主流马赫数靠近,说明流场马赫数在尾缘附近减小之后,又逐渐增大,最后恢复为主流马赫数。根据速度云图可以发现,在尾流的相同位置处,贴附小肋薄膜后的马赫数比贴附光膜的要高,说明小肋薄膜能够减小翼面的摩擦阻力。
图20和21分别为Ma=0.6和0.7时翼型表面贴附光膜和顺流向小肋薄膜后不同展向位置的速度截面对比。从图中可以发现,不同展向位置的流场特性无明显变化,说明流场稳定、试验模型合理、没有三维流动。因此,可以将三维流场沿展向进行平均,进而对比研究马赫数沿流向的变化。

图16 贴附光膜后尾流速度场分布,Ma=0.6

图17 贴附小肋膜后尾流速度场分布,Ma=0.6

图18 贴附光膜后尾流速度场分布,Ma=0.7
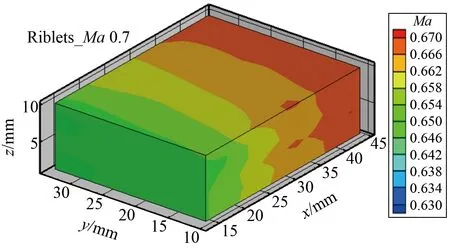
图19 贴附小肋膜后尾流速度场分布,Ma=0.7


图20 不同截面位置的马赫数分布, Ma=0.6
图22和23分别给出了三维流场展向平均后的速度场分布,图24和25为对应的沿流向的马赫数变化情况。通过对比可以发现,在流场的相同位置,贴附小肋膜后的流场马赫数总是比贴附光膜的要高,但最终均向主流马赫数靠近,说明小肋膜能够减小壁面的摩擦阻力,具有一定的减阻效果,但是只对翼型一定距离内的流动才有作用,超出一定距离后,会恢复为主流马赫数。
定义ε为速度增加量,计算公式如下:
×100%
(2)
根据此公式分别计算来流Ma=0.6和0.7条件下的速度增加量(计算时将流向马赫数取了一个平均值进行计算),见表3。从表3中可以看出,在2种马赫数来流条件下小肋薄膜后的速度值均有一定增加,Ma=0.7时的速度增加量为1.4%,Ma=0.6条件下的速度增加量为0.6%。造成两者速度增加比例不同的原因在于:不同的来流马赫数下小肋的无量纲尺寸不同。理论研究表明:小肋的无量纲高度和宽度在17左右时会达到一个最佳的减阻效果[14],高于和低于该数值时,减阻效果均有不同程度的减弱。本文采用的小肋在Ma=0.7时的无量纲尺度比Ma=0.6时更加接近此数值,因此速度增加量更加明显,从而也表明了试验结果和理论是相符的。此外,根据风洞空流场的三维结果,时间平均后的Tomo-PIV速度脉动小于0.3%,且小肋主要影响近壁面区域,因此相应的速度增量0.6%和1.4%的测量结果是可信的。
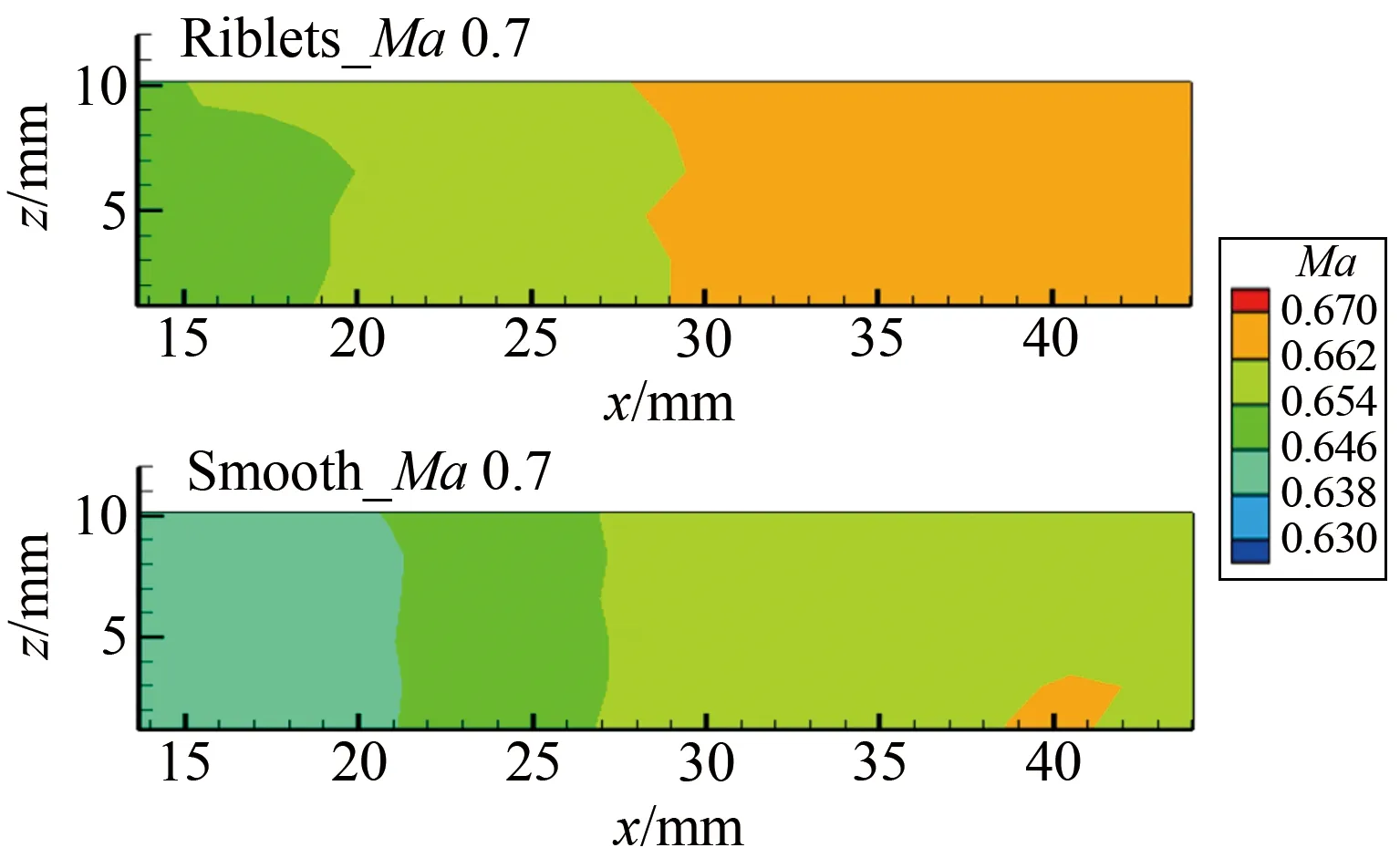
图23 展向平均之后的马赫数分布,Ma=0.7

图24 展向平均后沿流向的马赫数变化, Ma=0.6

图25 展向平均后沿流向的马赫数变化, Ma=0.7

表3 小肋减阻效果Table 3 The drag-reduction effect of riblets film
4 总 结
基于中国航天空气动力技术研究院FD-12亚跨超声速风洞,设计了Tomo-PIV技术应用布局方案,通过空风洞的流场测量验证了Tomo-PIV的精度,进行了超临界翼型OAT15a尾缘后方流场的三维速度场测量,得到如下结论:
(1) 通过对Ma=0.6条件下Tomo-PIV和PIV的空风洞流场测量结果对比,证明了Tomo-PIV测试结果的精确性,实现了Tomo-PIV技术在亚跨声速风洞的应用。
(2) 对翼型表面贴附光滑薄膜和顺流向小肋薄膜后翼型尾缘后方流场进行了Tomo-PIV测量,发现贴附顺流向小肋薄膜后流场马赫数增大,表明顺流向小肋薄膜能够抑制翼型表面摩阻,具有一定的减阻效果。
(3) 不同无量纲尺度小肋具有的减阻效果不同,在本试验中,Ma=0.7时小肋的无量纲尺度更加接近最佳减阻效果的小肋尺度,因而减阻效果更加明显。
猜你喜欢
能源工程(2022年2期)2022-05-23 13:51:48
数学物理学报(2021年5期)2021-11-19 07:01:30
科学技术与工程(2020年30期)2020-12-04 05:06:30
水利规划与设计(2020年1期)2020-05-25 08:01:34
学生天地(2017年12期)2017-05-17 05:51:23
中国火炬(2015年7期)2015-07-31 17:39:58
弹箭与制导学报(2015年1期)2015-03-11 15:32:22
中国火炬(2014年5期)2014-07-24 14:15:58
实验流体力学(2013年2期)2013-09-21 07:52:40
实验流体力学(2012年3期)2012-04-17 10:35:52
