反潜直升机使用吊放声呐持续跟踪潜艇作战使用方法及其效能仿真
2020-09-12 07:36丛红日郭晏宗粘松雷
海军航空大学学报 2020年3期
丛红日,郭晏宗,杨 斌,粘松雷
(海军航空大学,山东烟台264001)
对潜跟踪是反潜作战过程中的一个重要阶段[1]。战时,对潜跟踪是对潜搜索和对潜攻击之间承上启下的重要环节;在和平时期,通过跟踪,不但能掌握目标潜艇的运动规律,并对其进行有效威慑,还能达到在真实战场环境下进行训练,提高反潜作战能力的效果。
对潜跟踪作战效能的发挥,对反潜作战的整体效能具有重要影响[2]。
与其他反潜作战平台相比,反潜直升机具有反应迅速、机动能力强、作战效率高、隐蔽性强(不易被目标潜艇发现)等突出优势[3],而且舰载反潜直升机能通过与载舰之间的协同配合,有效弥补反潜直升机留空时间短的劣势。这些特点使反潜直升机成为对潜跟踪的较为理想的作战平台。
跟踪潜艇主要指搜索转跟踪和持续跟踪这2个相对独立的作战过程。搜索转跟踪是指通过搜索发现目标潜艇后,采用一定的方法测定出目标潜艇的位置、航向、航速等参数值。同时,由于测定的参数值必然存在一定的误差,还要确定各参数值的误差大小,为后续对目标潜艇实施持续有效跟踪创造条件,奠定基础;持续跟踪是指在较长时间内采用一定的作战使用方法与目标潜艇保持接触。
反潜直升机可以使用吊放声呐、声呐浮标等探测器材持续跟踪水下航行的目标潜艇,由于声呐浮标是一次性使用的消耗性器材,而吊放声呐可以反复使用[3-4],因而反潜直升机通常使用吊放声呐实施对目标潜艇的持续跟踪。
本文系统研究反潜直升机使用吊放声呐持续跟踪潜艇的作战使用方法,并对其作战效能进行建模仿真,为反潜直升机的训练和作战提供参考,对提高航空反潜部队的战斗力具有重要的军事价值。
1 反潜直升机使用吊放声呐持续跟踪目标潜艇作战使用方法建模
1.1 作战使用方法
根据吊放声呐的技战术性能特点,其基本探测方法为“逐点悬停探测”[5-6]。为了能长时间持续跟踪目标潜艇,吊放声呐应采用被动方式跟踪[7],以免被目标潜艇发现,从而更有效地持续跟踪潜艇。
基于对吊放声呐性能、使用特点以及持续跟踪潜艇的特点、要求的深入分析研究,反潜直升机使用吊放声呐持续跟踪潜艇时,宜采用“两侧交替、同步运动、长时听测、动态修正”的方法。
1.1.1 两侧交替
所谓两侧交替,是以所测定的目标潜艇航向为基准线,反潜直升机在基准线的两侧使用吊放声呐,在相对目标潜艇的相应位置,确定并交替变换悬停探测点进行探测,如图1所示。
该方法与对潜搜索时的曲折运动(蛇形)搜索法类似,但曲折运动(蛇形)搜索法用于对潜搜索[8-9],而本方法则根据对目标潜艇跟踪的特点和要求,用于实施对目标潜艇的跟踪。因此,两者虽然表面上相似,但目的和具体的作战使用方法(如悬停探测点的确定)并不相同。

图1 两侧交替探测示意图Fig.1 Schematic diagram of the tracking model
通过吊放声呐悬停探测点的两侧交替,可以解决跟踪过程中2个方面的问题:
首先,由于对目标潜艇航向的测定存在误差,通过两侧交替,就能在吊放声呐探测距离一定这一限制条件下[10],扩展吊放声呐沿目标潜艇航向的探测覆盖范围[11],从而有效降低目标潜艇航向测定误差对跟踪效果的影响,在其他条件不变的情况下,延长跟踪时间。
其次,由于反潜直升机使用吊放声呐进行探测时的速度(在各个探测点依次进行探测的平均速度,简称为探测速度)与目标潜艇的航速并不一致,通常情况下,探测速度大于目标潜艇航速,通过合理进行两侧交替,便于使探测速度在目标潜艇航向上的分量(可称为跟踪速度)与目标潜艇航速保持一致,从而利于在尽可能长的时间对目标潜艇实施跟踪。
1.1.2 同步运动
同步移动是指跟踪过程中反潜直升机使用吊放声呐对目标进行逐点探测的运动过程在方向上和速度上与目标潜艇的航向和航速保持一致。即目标潜艇怎么运动,探测跟踪就怎么运动,两者之间在方向和速度上保持一致。只有这样,才能保证长时间地进行跟踪。
1.1.3 长时听测
长时听测是指在吊放声呐每个悬停探测点,除了应尽可能探测到目标潜艇,在此基础上,还要尽可能延长吊放声呐的监听探测时间。
之所以需要长时探测,是因为通过跟踪,需要达成一定的作战目的[12],如尽可能获取目标潜艇噪声特性等信息、准确测定目标潜艇位置等参数、为攻击做好准备等,而这些都需要时间做保证。与目标潜艇接触(也就是能够探测到目标潜艇)的时间越长,对实现跟踪的目的越有利。
1.1.4 动态修正
跟踪必须以对目标潜艇位置、航向、航速的判断为前提,跟踪时的作战使用方法也都基于对目标潜艇位置、航向、航速的判断。但目标潜艇位置、航向、航速的测定都不可避免地存在误差,而且跟踪时间越长,误差对跟踪的影响越大,如果不对误差进行修正,超过一定时间,就可能导致跟踪失败。因此,在跟踪过程中,除了通过探测与目标保持接触,还需要对目标航向、航速等参数不断进行测定,并据此对作战使用的相关参数进行修正,从而使作战使用方法更加科学有效,提升跟踪效果。
1.2 持续跟踪过程中重要战术参数分析
1.2.1 相邻探测点间距
反潜直升机使用吊放声呐跟踪时,相邻2 个探测点之间的间距D 是一个重要的战术参数[13],需要科学确定。
确定2 个相邻探测点之间的间距时,须要根据吊放声呐探测距离R 来确定[14]。探测点间距D 通常用探测距离R 和倍数ξ 来表示。显然,

在某个探测点,映射到平面坐标,吊放声呐的有效探测范围为以当前悬停探测点为圆心,以R 为半径的区域,称为探测圆。根据ξ 的取值(也就是D 的取值)不同,相邻探测圆之间的关系表现为3 种情况,即相离、相切和相交。在跟踪时,一般应采用相邻探测圆相切的方法(即ξ=2),既能取得较好的跟踪效果,又使作战使用相对简单。
具体方法为:相邻2个探测圆相切,而且应在目标潜艇航向线(即基准方向线,简称基准线)上相切,以保证2 个探测点对称分布于基准线的两侧(即两侧交替),如图2所示。
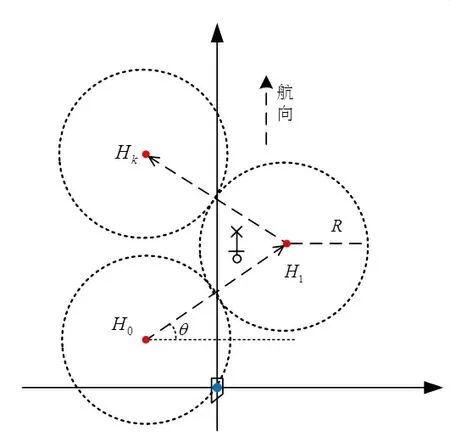
图2 吊放声呐探测圆相切示意图Fig.2 Schematic diagram of the tangent circular detection range of the dipping sonar
此时,相邻2 个探测圆之间不会出现空白区。如图2 所示,由于两侧交替依次探测时探测行进的方向与目标潜艇航向之间呈一定角度(即转折角),基准线与左右2 个探测圆均存在一定交集,有利于对目标潜艇的探测;另一方面,在转折角一定的情况下,能够增加跟踪的覆盖宽度;更重要的是,在2探测圆相切的情况下,各探测点以及目标潜艇之间的位置关系非常清晰明了,既便于作战使用方法的研究,又便于作战使用时的组织实施。
当然,1 <ξ <2(即2 探测圆相交)时,作战使用的具体方法与(即2 探测圆相切)时基本一致,只是ξ 的具体取值不同。因此,一般地,D 的表达式为:

1.2.2 转折角
转折角θ 是指反潜直升机使用吊放声呐通过两侧交替变换探测点进行探测实施跟踪时,相邻2 个探测点之间的连线与垂直于目标潜艇航向的方向所形成的夹角,如图2所示。
在探测点间距一定的情况下,通过合理调整转折角,能使探测速度在目标潜艇航向上的分量与目标潜艇的航速保持一致,从而便于保证跟踪行动与目标潜艇运动之间的同步。
1.2.3 覆盖宽度
覆盖宽度L 是指分布于目标潜艇航向两侧的相邻2个探测点探测范围在垂直于目标潜艇航向方向上的投影,可知:

覆盖宽度越宽,则目标潜艇航向测定误差对跟踪的影响就越小,更有利于提高跟踪效能。
式(3)可以看出,通过两侧交替,能有效提高覆盖宽度,这也正是采用“两侧交替”方法的主要原因之一。
1.2.4 探测周期
探测周期是指反潜直升机使用吊放声呐探测时,在当前探测点下发声呐探头,监听目标,收回探头直至转移飞行至下一个探测点的时间周期[15]。
设T周期为探测周期时间,T放为在当前探测点下放吊放声呐探头至水下预定深度所需时间,T监听为在当前探测点听测目标的时间,T收为收回探头所需的时间,T飞为反潜直升机从当前悬停探测点转移至下一个探测点所需要的飞行时间,则:

如果把下放和收回声呐探头所用时间统一用T收放表示,则:

式(5)中,T飞取决于2 个探测点之间的间距D 和反潜直升机转移探测点时的飞行速度v飞,显然,

因此,

在每个悬停探测点,应长时探测,即应尽量延长T周期中T监听的时间。为此,应尽量提高转移探测点时反潜直升机的飞行速度v飞。
1.2.5 探测速度与跟踪速度
探测速度v探测是指反潜直升机使用吊放声呐逐点探测时的平均运动速度。通常情况下,在每个探测点的情况一致。因此,只需要分析一个探测点的情况即可,显然,

跟踪速度v跟踪是指反潜直升机使用吊放声呐逐点探测跟踪目标潜艇时,探测速度在目标潜艇航向方向上的分量,也就是在目标潜艇航向的方向上,跟踪行动所呈现的速度,则显然,

1.3 跟踪方法建模
通过以上对反潜直升机使用吊放声呐实施跟踪时的相关战术参数的分析,就可以根据1.1 节提出的作战使用方法建立定量模型,为反潜直升机使用吊放声呐跟踪目标潜艇时的作战使用提供可操作性强的具体方法。如图3所示。

图3 持续跟踪模型Fig.3 Continuous tracking model
1.3.1 基准时刻的确定
由于跟踪目标潜艇是一个持续的作战过程,对时间高度敏感,所有作战行动都是以基准时刻为基准开展。因此,基准时间T0需要科学确定。
经深入分析,应以反潜直升机在首个探测点已经下放了探头并开始对目标进行听测的那个时刻作为基准时刻。
基准时刻确定了,目标潜艇在该时刻的位置也就相应确定了。
1.3.2 跟踪基准方向的确定
跟踪的基准方向就是以什么方向为基准来对目标潜艇实施跟踪。
为了保证跟踪行动与目标潜艇运动之间的“同步运动”,应以目标潜艇的航向作为跟踪的基准方向,即沿所测定的目标潜艇航向的方向实施跟踪。
1.3.3 转折角的确定
由于采用“两侧交替”探测的跟踪方法,为了保证跟踪行动与目标潜艇运动之间的“同步运动”,转折角θ 应科学确定。基本要求是使反潜直升机使用吊放声呐跟踪目标潜艇时的跟踪速度v跟踪与目标潜艇的航速v潜保持一致。即应使

把式(9)代入式(10)中,可得

再把式(8)代入式(11)中,可得

式(12)为跟踪时使用吊放声呐的探测行动与目标潜艇运动在速度上保持同步的基本公式。
如果通过调整转折角θ 来保持同步,则可以对式(12)做以下变换:

式(13)中,v潜已经测定,是一个已知量,探测周期T周期和相邻探测点间距D(一般应为吊放声呐探测距离的2 倍)在作战使用时也能确定,使用式(13),就能计算出为了保持同步跟踪所需要的转折角θ 的具体取值。
1.3.4 首个探测点位置的确定
这里指的首个探测点,是反潜直升机使用吊放声呐开始对目标潜艇实施持续跟踪时的第1个悬停探测点。
由于采用逐点探测方式,首个探测点位置的确定至关重要,后续各个探测点的位置需要基于首个探测点位置才能确定。
首个探测点应位于目标潜艇航向的左侧或右侧,至于选定在左侧还是右侧,主要根据战场当时的气象条件,以有利于反潜直升机在探测点迎风悬停为准。
首个探测点的位置应基于在基准时刻目标潜艇的位置以及转折角θ 才能科学确定。基本原则是:在基准时刻,目标潜艇能够处于该探测点的探测范围内,而且在该探测点进行听测时,目标潜艇应能在尽可能长的时间处于该探测点吊放声呐的探测范围内,以便尽可能长时间地对目标进行听测。为此,首个探测点应位于基准时刻目标潜艇位置的侧(左侧或右侧)前方的位置。如图3所示。
设首个探测点与目标潜艇在基准时刻时的位置之间的距离在垂直于目标潜艇航向方向上的分量为r垂直1,在平行于目标潜艇航向方向上的分量为r平行1。当采用2个探测圆相切(即D=2R)的方法时,应使

由于基准时刻目标潜艇的位置已经确定,r垂直1和r平行1确定了,首个探测点的位置也就确定了。首个探测点位置确定后,反潜直升机即应在基准时刻飞往该探测点悬停并下放声呐探头至预定深度。
1.3.5 后续各探测点位置的确定
首个探测点位置确定后,即可据此确定第2 个探测点的位置,再依次确定后续各个探测点的位置。
设第n 个探测点与目标潜艇在基准时刻时的位置间的距离在垂直于目标潜艇航向方向上的分量为r垂直n,在平行于目标潜艇航向方向上的分量为r平行n。当采用2 个探测圆相切(即相邻2 个探测点的间距D为吊放声呐探测距离R 的2倍)的方法时,应使

这样,一旦坐标系建立,如以目标潜艇在基准时刻的位置为坐标原点,以目标潜艇航向为纵轴建立平面直角坐标系,就很容易计算出每个探测点的具体位置坐标。
1.3.6 转移探测点时的时间控制
各个探测点位置确定后,反潜直升机即应按照上述方案飞行至相应探测点进行探测。其中,各个探测点的探测周期相同,均为T周期,反潜直升机应按预定时间准确飞行至下一个探测点。
具体来说,在每个探测点,由于起始时间都从反潜直升机在当前探测点悬停并下放吊放声呐探头至预定深度开始起算,当监听时间满T监听后,即应收回声呐探头,飞行至下一个探测点悬停并下放声呐探头至预定深度,开始下一个周期的探测。其中,

式(16)中,在每一个探测周期,T放和T收相差一般不大,可看作是常量,而T飞取决于探测点间距D 和反潜直升机转移探测点时的飞行速度v飞。其中,在每个探测点,探测点间距D 虽然都是一致的。但反潜直升机在每个探测点悬停时需要迎风悬停,为了能迎风悬停,在转移探测点时一般就难以以直线航线飞行至下一个探测点,而是沿一定的(根据风向、风力情况)曲线路径飞行。也就是说,实际飞行里程不一定是D,而且不同探测点的飞行里程不同。这就造成了在各个探测点,T飞并不完全相同,需要根据风向风力情况而定。为此,在实际作战时转移探测点的时间把握上,应根据战场具体风力风向情况下所需T飞的实际取值,按照式(16)对监听时间进行必要调整。
2 跟踪效能仿真评估
在作战使用方法研究的基础上,针对所提出的作战使用方法,采用数学方法和仿真方法相结合的方法建立效能评估模型,并在想定条件下对作战使用方法的跟踪效能进行评估,对所提出作战使用方法的可行性和有效性进行验证。
2.1 效能指标的确定
对于跟踪潜艇而言,基于跟踪的目的,经过分析研究认为,最能体现跟踪作战效果的指标是对目标潜艇有效实施跟踪的最大时间,即持续跟踪时间。
持续跟踪时间(简称跟踪时间)是指从开始实施跟踪直至跟踪失败(丢失跟踪目标)的总时间。
2.2 效能评估模型建立
2.2.1 数学模型
以基准时刻目标潜艇所处的位置点为坐标原点(O 点),以基准方向为纵坐标(y 轴),建立平面直角坐标系。根据上文中所提出的跟踪方法模型,建立相应的数学模型。
1)吊放声呐各探测点位置表示。设第n 个探测点的位置坐标为(x探测点n,y探测点n),则由上文的作战使用方法,就可确定各探测点的位置坐标。由于采用“两侧交替”的跟踪方法,见图4,首个探测点可在所测定的目标潜艇的航向方向(即跟踪基准方向)的左侧或右侧,后续探测点依次位于基准方向的另外一侧,在左侧或右侧,探测点位置的x 坐标符号(正负)相反。
(1)当前悬停探测点位于基准方向左侧时,即首个探测点位于基准方向左侧且n 为奇数时,或者首个探测点位于基准方向右侧且n 为偶数时,显然,
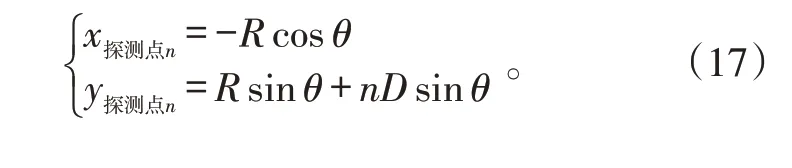

图4 吊放声呐探测点位置表示Fig.4 Position representation of dipping sonar detection point
(2)当前悬停探测点位于基准方向右侧时,即首个探测点位于基准方向右侧且n 为奇数时,或者首个探测点位于基准方向左侧且n 为偶数时,显然,

2)目标潜艇位置表示。在持续跟踪过程中,目标潜艇一般不改变航向和航速[16]。
设目标潜艇的位置坐标为(x潜,y潜) ,其航速为v潜,其航向角(即目标潜艇航向与坐标系x 轴之间的夹角)为α。在建立平面直角坐标系时,以基准时刻目标潜艇的位置为坐标原点,以基准方向为纵坐标(y轴),则在从基准时刻开始起算的任意时刻t,目标潜艇的位置坐标为:

3)探测效果判别。跟踪以对目标的探测为基本方法,只有探测到了目标,才能对目标实施有效跟踪。
那么,怎样才算是探测到了目标呢?
如果不考虑机组人员的训练水平以及吊放声呐故障等因素,可以认为:只要目标潜艇在吊放声呐当前探测点的探测范围,就认为是探测到了目标。设吊放声呐探测点位置与目标潜艇位置之间的距离为d探测点至潜艇,则

当满足以下关系时,就可认为在当前探测点探测到了目标潜艇:

否则,在当前探测点无法探测到目标潜艇。
4)跟踪丢失的判别。由于采用“两侧交替”跟踪方法,吊放声呐探测点交替分布在基准方向(测定的目标潜艇航向,即y 轴的方向)的两侧。因此,如果在某一个探测点(位于y 轴的一侧)没有探测到目标,但只要在下一个探测点(位于y 轴的另外一侧)探测到了目标潜艇,则仍然是成功对目标潜艇实施了跟踪。只有当分别位于y 轴两侧的连续2个探测点都没有能探测到目标潜艇,才认为是丢失了目标,跟踪失败。
5)跟踪时间计算。设跟踪时间(即单次跟踪的最大有效跟踪时间)为t跟踪。如果在第m 个探测点成功探测到目标潜艇后,在第m+1 个探测点和第m+2 个探测点连续2 个探测点都没能探测到目标潜艇,则跟踪时间为前m 个探测点探测周期T周期的累计,即,

2.2.2 仿真模型
基于上述数学模型,采用蒙特卡洛法对提出的作战使用方法的作战效能(效能指标为跟踪时间t跟踪)进行仿真计算。
在作战使用方法一定的情况下,所测定的目标潜艇航向和航速误差(本文搜索转跟踪阶段测定不讨论)对跟踪效能影响最为显著。因此,主要针对这2个误差对于跟踪效能的影响进行仿真分析。
基于误差理论,结合目标潜艇航向测定误差和航速测定误差的特点,在给定误差的前提下,目标潜艇的航向和航速均服从正态分布,即:目标潜艇的实际航向角α 服从以所测定航向(在所给定坐标系下航向角α 为90°)为均值、以误差为均方差的正态分布[17]。仿真时,目标潜艇的航向角α 的具体取值使用正态分布随机数生成工具生成;类似地,目标潜艇的实际航速v潜服从以所测定航速(在想定中给出)为均值、以误差为均方差的正态分布。仿真时,v潜的具体取值也使用正态分布随机数生成工具生成。
使用Matlab编写仿真程序进行仿真计算。
采用时间推进的方法进行仿真,仿真步长设定为1 min,仿真次数为100次。
2.3 想定条件
(1)吊放声呐探测距离为×km,即R=×km,方位角测量误差±×°。吊放声呐在整个跟踪期间均能有效跟踪[18]。而且只要敌潜艇进入到了吊放声呐的探测范围,机组人员就能探测到敌潜艇。
(2)采用上文所述的方法对敌潜艇实施跟踪。其中,相邻探测点之间的间距D 为吊放声呐探测距离R的2 倍(探测圆相切);在每个悬停探测点的探测周期均 为××min ,即T周期=××min ,在 整 个T周期中,T收=T放=×min,v飞=×××km/h,T监听通过计算确定;为满足同步跟踪的要求,转折角θ 通过计算确定,即通过调整转折角θ 的取值来保证同步跟踪。
(3)经过搜索转跟踪,测定了敌潜艇的位置、航向、航速。其中,所测定的敌潜艇航速v潜为×kn,即v潜=×kn,误差范围±×kn;航向误差为±×°。
(4)为确保能长时间跟踪敌潜艇,2架反潜直升机采用交替换班的方式[19]。因此,跟踪时间不受单架反潜直升机留空时间的制约。
2.4 仿真结果及其分析
2.4.1 仿真结果
1)航向误差对跟踪时间的影响。在采用上文所述的作战使用方法跟踪潜艇时,目标潜艇航向的测定误差对跟踪时间的影响如图5所示。

图5 航向误差对跟踪时间的影响仿真结果图Fig.5 Simulation results of the effect of heading error on tracking time
2)航速误差对跟踪时间的影响。目标潜艇航速的测定误差对跟踪时间的影响如图6所示。
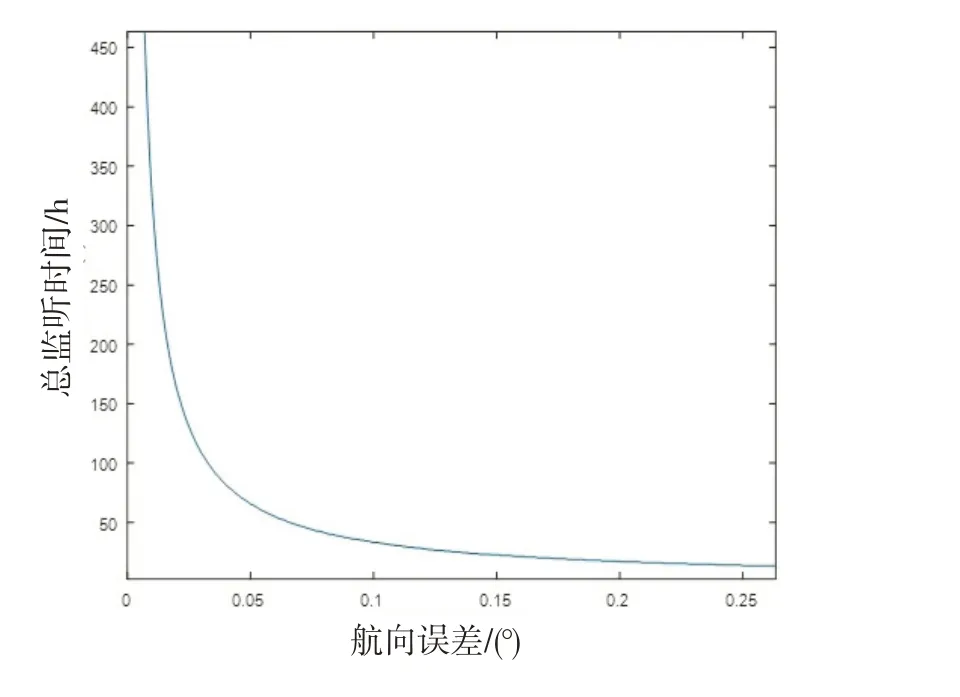
图6 航速误差对跟踪时间的影响仿真结果图Fig.6 Simulation results of the effect of speed error on tracking time
2.4.2 仿真结果分析
1)当航向误差和航速误差不大时,能够有效实施跟踪的时间较长,可以取得好的跟踪效果。这验证了本文所研究提出的作战使用方法的可行性和合理性。
2)当航向误差和航速误差较大时,跟踪时间较短。因此,为了能长时间地可靠进行跟踪,应对目标潜艇的航向和航速重新进行测定,并据此对作战使用方法进行修正。也就是说,只要科学地对作战使用方法中的相关参数(跟踪速度、跟踪的基准方向等)进行动态调整,即使对目标潜艇航向、航速的测定误差较大,也能保证长时间对敌潜艇实施可靠跟踪,这也正是在所提出的作战使用方法中专门包含动态修正方法的原因所在。
3 结束语
根据反潜直升机及其机载探测器材的特点以及跟踪潜艇的特点和要求,研究提出了反潜直升机使用吊放声呐持续跟踪潜艇的一种作战使用方法,并对其效能进行了仿真。仿真结果验证了所提出作战使用方法的合理性和有效性。
本文的研究是在相对理想的条件下进行的,受到海战场环境、作战对象(目标潜艇)性能等复杂因素的影响,对潜跟踪非常复杂,也非常困难。因此,还需结合这些复杂因素,更加深入地开展进一步的研究。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
海洋开发与管理(2020年2期)2020-09-10
当代陕西(2019年17期)2019-10-08
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
广东造船(2016年3期)2016-07-13
中国水运(2014年12期)2015-01-09