新型轨道综合智能检测系统研制及运用
2020-09-10 22:26张汉平欧伟范忠林吴宇吴耿才刘东光赖文辉张密
交通科技与管理 2020年10期
张汉平 欧伟 范忠林 吴宇 吴耿才 刘东光 赖文辉 张密





摘 要:论述了新型轨道综合智能检测系统各子系统的方案设计和验证效果,新型轨道综合智能检测系统由图像采集处理、里程定位、离线数据分析三个子系统组成,图像采集处理采用了高速二维线阵相机、高速三维激光测量等技术,并基于深度学习算法的图像智能识别方法对轨道扣件异常、钢轨表面缺陷病害进行自动检测,可以安装在运营电客车或工程车上,对轨道图像进行采集、分析和综合统计处理,相关维修人员能够及时发现故障隐患并进行检修,从而提高了轨道线路巡检效率和准确率,保障了地铁列车的运行安全。
关键词:计算机视觉;三维激光测量;深度学习;精确定位;智能识别
中图分类号:U270.7 文献标识码:A
0 引言
随着我国城市的不断发展,地铁轨道交通已成为其中不可分割的重要组成部分。轨道作为重要的铁路基础设施,其运用状态对行车安全具有直接和至关重要的影响。现阶段,对于轨道的检测主要是人工巡检,该方式依赖于自然条件、巡检人员的精力和熟练度。
在過去几十年中,世界上许多个国家的铁路研究院和一些研发相关产品的公司就利用计算机视觉技术研发出了许多监控铁路构配件的状态的自动检测系统,例如日本的列车运营管理自动化系(COMTARC)、德国MEMEC公司的轨检综合检测车等,大大地增加了准确率和检测效率,并且实时高效,也增加了检测的可靠性和稳定性。
1 系统整体设计
系统的设计原理为基于先进的二维和三维图像采集技术对轨道设备、设施进行成像,将采集的数据与线路里程信息相对应,获得完整的二维和三维轨道图像数据记录,然后采用图像处理和基于深度学习的目标智能识别算法,实现对轨道病害的自动检测、识别,同时输出缺陷报表,指导工务人员进行现场维修。
轨道综合智能巡检系统从功能上可划分为图像采集处理、里程定位、离线数据分析三个功能模块。
1.1 图像采集模块
图像采集模块的主要功能是在列车高速运动的状态下,采集轨道全断面、轨枕、道床区域的二维和三维图像;尽可能完整地呈现扣件、轨道夹板、轨枕、轨面的清晰图像;采集速度要满足列车0 km/h~120 km/h的工况下运行;为此采用了高速线阵相机进行二维图像采集、采用了高速三维激光扫描相机进行三维成像。
图像采集模块主要由二维线阵相机成像装置、三维激光扫描成像装置、同步触发装置、采集主机及软件系统等组成。
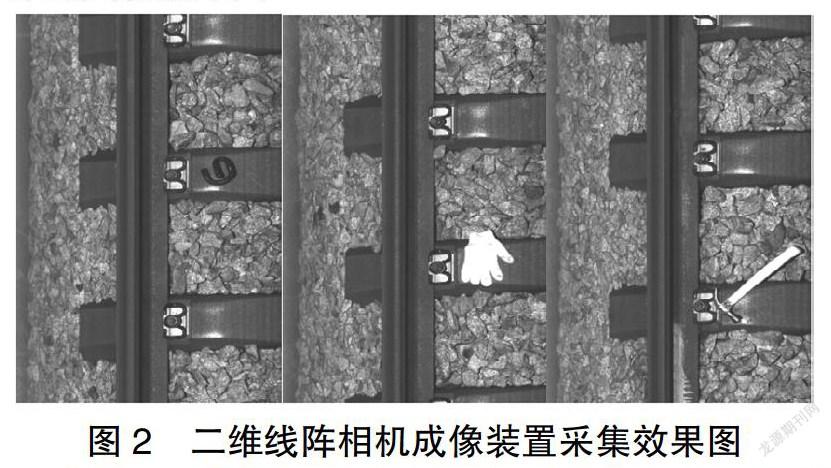
二维线阵相机成像装置采用了5组线阵图像采集模块分别对左右轨和轨枕进行全断面图像采集,二维线阵相机的采样频率>30 kHz,在120 km/h时速下能够达到纵向1 mm的采样间距;设备的布局图如下:
图1 二维线阵相机成像装置设备
二维线阵相机成像装置内部集成了红外补偿光源,符合铁路设备国家标准TB、防护等级IP67,适应环境温度-40℃~60℃。
采集图像效果图:
图2 二维线阵相机成像装置采集效果图
三维激光扫描装置采用了高速激光扫描三维成像系统,采集频率大于15 kHz,满足120 km/h时速下2 mm的纵向采样间距;同时配置了一台激光线结构光进行轮廓测量,可以精确测量钢轨的轮廓外形,同时通过点云渲染的方式还原钢轨及扣件的三维图像。
设备采集的三维点云图像如下图所示:
图3 三维激光扫描装置采集效果图
同步触发装置安装在检测梁底部,主要功能是通过在列车轴端安装的光电编码器输出的脉冲,来同步触发各个相机进行拍照的功能,由于编码器输出脉冲与速度成正比,所以使得线阵模块采集的行频率随速度精确变化,保证了采集图像的正常比例,杜绝了横向和纵向的变形。
1.2 里程定位模块
里程定位模块的功能是实时获取列车当前运行的速度和位置信息,为图像采集的数据提供里程定位信息。
主要采用速度传感器和轨道电子标签的方式进行综合定位。
车辆运行过程中,由安装在车轮轴头上的速度传感器随着车轮的转动而输出距离脉冲,通过对距离脉冲计数计算出列车走行里程;在列车加减速和弯道位置,由于惯性会产生空转和打滑的情况,导致计算的里程信息产生累积误差,需要通过其他方式的位置信息进行里程校准。
在轨道线路上每隔一定距离布置一个RFID电子标签,在检测装置上安装高速阅读器。当列车通过电子标签位置时,会自动识别出电子标签的卡号,将这个卡号与数据库中的信息进行比对,获取该标签所对应的里程信息,同时对当前检测的位置进行一次里程校准,避免产生累积误差。
通过综合定位后的定位误差可以达到+/-2 m内。
1.3 离线数据分析模块
离线数据分析模块包含:智能识别、图像显示和数据统计等功能。
图像采集完成后,由于数据量十分庞大,依靠人工浏览寻找病害变化的方式不可行,需要采用智能识别的方式进行自动识别分类。
缺陷检测的具体流程可分为图像增强、图像分割、目标检测、特征描述、数据降维和模式分类五个环节。
当接收到输入图像时,该模块先利用滤波等图像增强技术消除光线、雾霾等对图像质量的影响,以丰富图像信息量,加强图像的识别效果;图像分割为钢轨、扣件和道床三个区域;分割完成后,使用目标检测算法将每个区域中的待识别的特征目标提取出来,比如钢轨、扣件、轨枕等;然后以特征目标的典型病害为识别对象,通过特征变换将图像空间转化到更易于识别的特征空间;最后采用模式分类方法完成病害类型的判别。
该系统对各类缺陷的识别率都在90%以上,识别率跟网络训练所采用的样本量相关,样本量越多,检测模型的性能就会越优异。通过检测次数增加,其训练样本量不断扩充,让模型学习到更多有用信息,从而提高系统的检测性能。
图像显示功能集成在软件界面,通过图像拼接可以清晰地呈现轨道和轨枕全断面的图像,如图4所示,并且具备里程和站点位置提示,便于人工复核和查看。
图4 轨道图像分析界面
图像显示还可以将故障数据和图像进行导出,为维修人员进行现场复核提供依据。
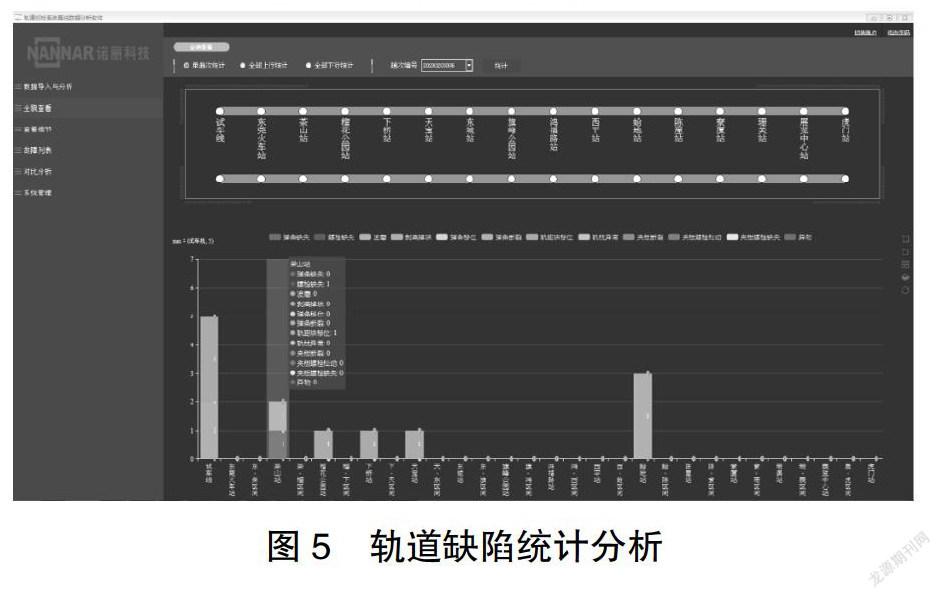
数据统计功能可以将每趟车跑车的缺陷进行报表统计,如图5所示,可以按照时间、站点区间、缺陷类型进行分类统计,为轨道缺陷数据分析提供依据。
图5 轨道缺陷统计分析
2 系统验证核实
轨道综合智能巡检系统在东莞地铁二号线安装以来,每次巡检能检出弹条缺失、弹条松动、钢轨波磨、钢轨掉块、道床异物缺陷等轨道缺陷,且检测快、识别准,能够及时地向相应维修工班提供故障信息和故障位置,从而能及时地处理故障,保障地铁的安全运营。
轨道异常识别案例如图6、7所示:
从轨道巡检系统检测的结果对比分析来看,每次跑车都会发现一些在检测周期间隔内新产生的轨道病害。较为常见的是扣件弹条移位、钢轨波磨、钢轨掉块等病害缺陷,对比以往人工步行巡检,新型综合智能巡检系统的检出效率和效果均远远高于人工巡检,通过现场检测、符合,系统对钢轨波磨、扣件脱落、扣件断裂等病害的检出率在90%以上。
3 结论
本文提出的新型轨道综合巡检系统,利用计算机二维视觉、三维测量、深度学习等技术,结合目标检测算法采集轨道钢轨和道床空间全断面高清晰图像、精确检测列车运行位置以及智能识别轨道缺陷,并将检测数据通过离线分析软件存储显示,方便工作人员监视,及时处理故障。以东莞地铁二号线为例,验证了本文所提出的新型轨道综合巡检系统具有检测快、识别准,能够及时地向相应维修工班提供故障信息和故障位置,保障了地铁运营安全,节约了地铁运营成本。
猜你喜欢
计算机应用(2016年12期)2017-01-13
中国新通信(2016年22期)2017-01-13
无线互联科技(2016年13期)2017-01-10
现代电子技术(2016年22期)2016-12-26
江苏教育·中学教学版(2016年11期)2016-12-21
现代情报(2016年10期)2016-12-15
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25