
危险气体罐车液位计算机视觉监控识别报警系统设计
2016-12-26 15:42李嘉贤李烨
现代电子技术 2016年22期
李嘉贤+李烨
摘 要: 在计算机视觉环境下,对危险气体罐车液位的检测识别,保障车辆运输安全。结合视觉图像处理技术,采用嵌入式超声无损检测方法,进行危险气体罐车液位计算机视觉监控识别报警系统设计。首先进行液位检测原理分析,构建系统装置的总体结构模型,进行危险气体罐车液位计算机视觉监控识别报警系统的硬件模块化设计和软件设计,设计了计算机视觉监控识别报警系统的超声信号A/D采样电路、时钟电路、滤波电路、程序加载电路和电源电路。基于计算机视觉监测方法,进行危险气体罐车液位内部状态特征的视觉监测。实验结果表明,该系统具有较好的液位检测性能,实现危险气体罐车液位的有效监控识别与报警,性能可靠稳定。
关键词: 危险气体罐车; 液位检测; 计算机视觉; 报警系统
中图分类号: TN948.64?34; TP216 文献标识码: A 文章编号: 1004?373X(2016)22?0067?0
0 引 言
随着自动化测试技术的发展,采用智能测试和计算机视觉方法进行液位检测和监控,借助的物理场有超声波、微波雷达、射线及激光等,能实现高低位报警功能,在工业控制场合中,固定位置处的液位监控是保障工业控制安全的重要技术,特别是在危险光车的运输过程中,需要对危险气体罐车的液位进行实时监控和识别,通过感应元件实现对液位的准确检测,通过检测发射和接收的时延来确定液位的高度。随着计算机视觉处理技术的发展,以及图像处理技术的应用,采用计算机视觉部监控方法进行危险气体罐车的液位监控识别成为未来实现液位准确监测和定位的重要发展方向,研究基于计算机视觉的危险罐车的液位检测监控报警系统,在保障危险罐车运输安全方面具有重要意义,相关的系统设计方法受到人们的重视[1?3]。
目前,对液位的检测方法按照测量液位的感应元件与被测液体是否接触,其可分为接触型和非接触型两大类。通过人工检尺法[4?6],加装浮子测量装置进行液位检测,微波雷达、射线及激光主要是应用在检测罐体为危险物质,将微波发射器和接收器安装在罐顶,利用超声技术并结合数字信号处理算法进行液位检测[7?9]。但是,上述设计方案因无法找到超声信号为零的位置,所以考虑使用灵敏度相同的另一液位检测传感器作为参考通道进行自适应噪声抵消,参考液位检测传感器应放置在对目标反射信号较小,更多的反映液位反射的超声信号的位置,但是对电磁波、光波等超声无法穿过的介质,液位检测的精度不高[10],难以实现有效的监控识别和报警。针对上述问题,本文进行危险气体罐车液位监控识别报警系统的改进设计,首先进行了液位检测原理分析,构建系统装置的总体结构模型,然后进行了危险气体罐车液位计算机视觉监控识别报警系统的硬件模块化设计和软件设计,最后通过实验分析验证了本文设计的液位监控识别报警系统的优越性能,得出有效性结论。
1 液位计算机视觉监控识别报警系统的总体设计
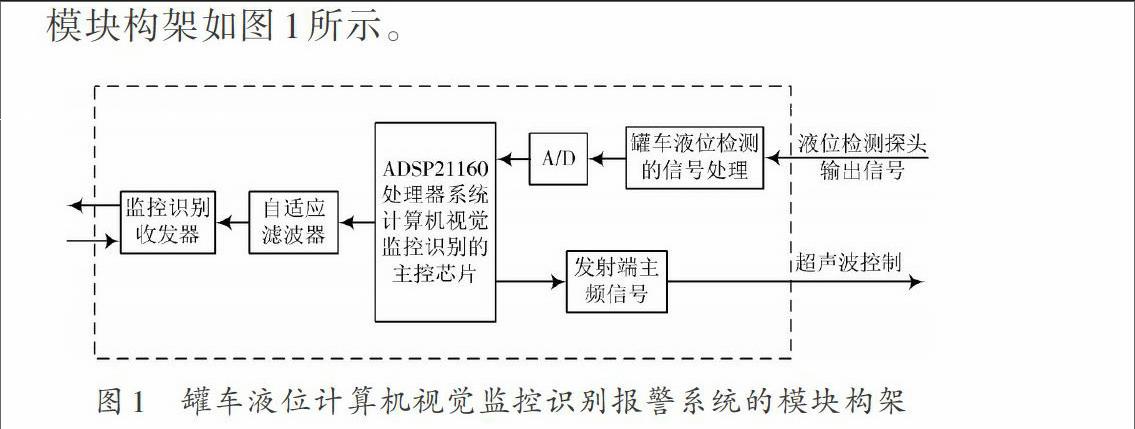
根据上述液位检测弊端分析,进行危险气体罐车液位计算机视觉监控识别报警系统设计,首先分析系统设计的总体架构模型,系统设计包括了系统的硬件设计和软件设计部分。硬件设计中,主要是在计算机视觉环境下完成液位视觉特征的获取,并对接收到的视觉特征进行相应的处理。本系统的硬件部分主要是数据采集和数字信号处理。接收探头采集的视觉特征通过信号采集电路进行高分辨率的A/D采样,液位视觉的差异性可以通过对分辨率和采样率的大小来判断。在对液位检测的超声信号检测的基础上,设计自适应滤波器进行信号滤波,通过自适应均衡方法得到基于视觉传感器的液位检测特征,为系统设计提供了准确的数据基础。因此,采集电路的设计必须采用高分辨率,硬件电路设计中,包括确定DSP处理器型号、Visual DSP++集成开发环境、外围器件以及连接关系。根据I/O设备的数据采集量确定液位监控识别系统的分辨率和基线恢复性能,采用ADI公司的ADSP21160处理器系统作为计算机视觉监控识别的主控芯片,数字信号处理器主要完成对整个硬件系统的电路控制,根据设计的功能指标得到本文设计的监控系统的计算机视觉的像素值的系统最低采样率为1 024 MHz, 则DSP的最低速度应大于[25×20=500 MHz]。
在进行罐体液位监控中,研究的罐体的厚度分别为5 mm平面罐体,20 mm平面罐体。由于本文构建的系统是一个高采样率的数据采集系统,在进行液位监控识别报警中,需要利用C8051F处理器发射频率为120 kHz左右的脉冲序列,作为原始声信号数据存入计算机系统,以此进行监控识别,根据上述描述,得到系统设计的模块构架如图1所示。
2 系统的设计与实现
2.1 硬件电路设计的指标分析
在上述进行了危险气体罐车液位计算机视觉监控识别报警系统的液位检测原理分析和系统设计总体构建描述的基础上,进行系统的硬件设计,系统的硬件模块主要包括了超声信号A/D采样电路、时钟电路、滤波电路、程序加载电路和电源电路等。系统的设计指标描述如下:
(1) 危险气体罐车液位计算机视觉监控识别报警系统的输出信号幅度<2 dB,脉冲信号的频谱宽度为12 dB;
(2) 监控系统的整体功耗<2 W;
(3) 计算机视觉监控接收机采样率不低于12 MHz;
(4) CAN总线对无液状态采集数据采样分辨率不低于8位;
(5) 有液状态采集数据中具有高压控制功能;
(6) 具有基线恢复功能。
根据上述设计的指标,进行硬件模块化设计。
2.2 系统硬件模块化设计与电路实现
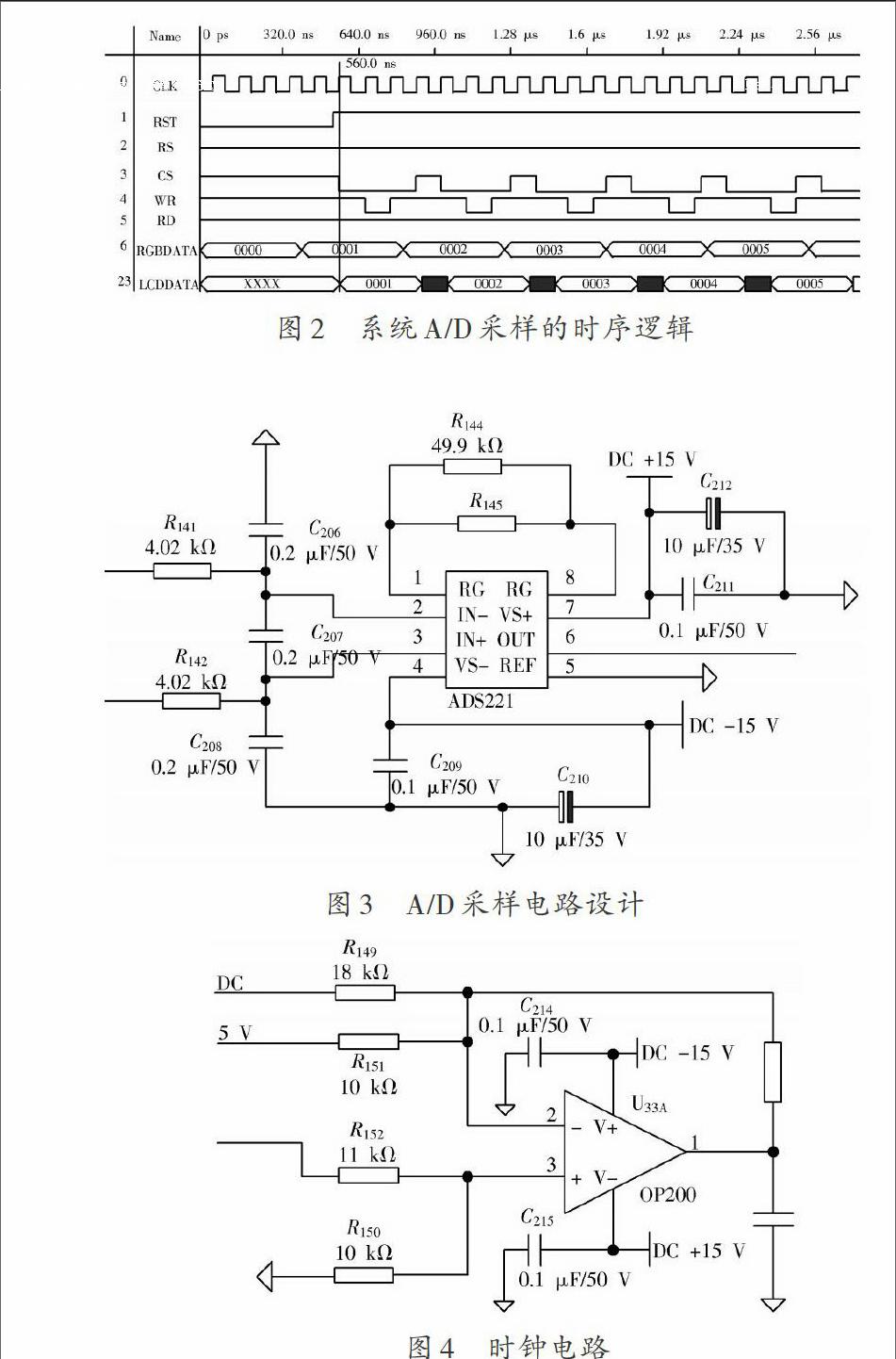
首先设计图像信号A/D采样电路,A/D采样电路是实现罐车液位计算机视觉监控识别报警系统设计的基础,通过A/D采样电路上传图谱数据,使用AD公司一款高性能A/D芯片AD9225对上一个缓冲区数据进行峰值检测,利用A/D芯片内的采样保持器和参考电压进行计算机视觉特征监测和液位脉冲数据采样,结合视觉特征在危险气体罐车中传播可以进行信号转换,通过A/D采样电路转化为计算机视觉监控系统能识别的数字信号,A/D芯片通过时钟把脉冲信息输入到罐体液位监测系统的中央处理单元,数字输出包括12位数字输出和一个溢出指示位,采用多样化的数据捕捉和传送模式,罐车液位计算机视觉监控识别报警系统的PPI的所有操作与A/D、D/A转换器、视频编码/解码器进行并行串口通信,由此实现控制信号的无帧同步、内部触发。根据上述设计,得到罐车液位计算机视觉监控识别报警系统A/D采样的时序逻辑如图2所示。
罐车液位计算机视觉监控识别报警系统的输入超声信号采用的是单端输入,耦合方式可以是交流耦合,通过上述逻辑结构,构建A/D采样电路如图3所示。
<系统的时钟电路是实现计算机视觉监控的模拟控制,通过发射时钟脉冲信号,实现液位监测的基线输入,系统的时钟电路由电压信号控制,控制电压0~5 V,采用LDAC信号将超声脉冲信号锁存在内部寄存器,复位信号通过危险气体罐车液位检测系统输入的参考信号对有液和无液的状态进行区别检测,通过手动按键,采用计算机视觉监测方法,进行危险气体罐车液位内部状态特征的视觉监测,时钟电路的VCC电压低于2.32 V时,按下开关S1后,LED会被点亮,危险气体罐车液位检测的计算机视觉检测端具有醒目的提示,通过上述分析,得到系统的时钟电路如图4所示。
图4中,WDO引脚产生的超声波将发生反射纵波(或横波),利用多层介质中超声波的传播规律进行计算机视觉监控识别,实现对罐体液位状态的检测。
2.3 软件算法的设计
由于是单峰液位突变特征,因此,可结合角点检测的特点,利用Harris角点检测方法能够实现丙烯聚合过程中非正常液位的检测和识别。角点能够描述液位图像中两个边缘的相交点,Harris角点检测方法主要通过液位图像中的特征点形状进行非正常液位的检测和识别,即使液位的颜色发生变化仍能进行有效的检测。
设置液位图像[I(x,y)],对其进行平移[(Δx,Δy)]后图像具有自相似性,这种自相似性能够用自相关函数进行评价,其公式如下:
[c(x,y;Δx,Δy)=(u,v)∈W(x,y)ω(u,v)[I(u,v)-I(u+Δx,v+Δy)]2] (1)
式中:[W(x,y)]为以[(x,y)]为中心模板的窗口;[ω(u,v)]为加权函数,可以将其设置为常数或者高斯函数。对泰勒公式进行展开,能够得到:
[I(u+Δx,v+Δy)≈I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy =I(u,v)+[Ix(u,v)Iy(u,v)]ΔxΔy] (2)
则:
[c(x,y;Δx,Δy)=ω(u,v)[I(u,v)-I(u+Δx,v+Δy)]2 ≈[Ix(u,v)Iy(u,v)]ΔxΔy2ω(u,v) =[Δx,Δy]M(x,y)ΔxΔyω(u,v)](3)式中:
[M(x,y)=Ix(u,v)2Ix(u,v)Iy(u,v)Ix(u,v)Iy(u,v)Iy(u,v)2=ACCB] (4)
因此,对液位图像进行平移后得到的自相关函数能够近似于下述二次项函数:
[c(x,y;Δx,Δy)≈[Δx,Δy]M(x,y)ΔxΔy] (5)
进而能够得到丙烯聚合过程中液位的视觉方程:
[Δx,ΔyM(x,y)ΔxΔy=1] (6)
图像中液位图像的尺寸是由[M]矩阵的特征值决定的,特征值能描述液位图像中灰度变化的速度和方向。Harris角点法无需对[M]的特征值进行计算,只要计算出一个角点的响应即可,其计算公式如下:
[R=detM-α(traceM)2] (7)
式中,[α]为经验参数,通常取值为0.04~0.06。利用上述方法取得的全部Harris角点,计算全部的角点纵坐标的均值进行计算即可得到实际的液位高度,从而实现丙烯聚合过程中非正常液位的准确检测与识别。
3 系统软件开发仿真环境描述和系统调试结果分析
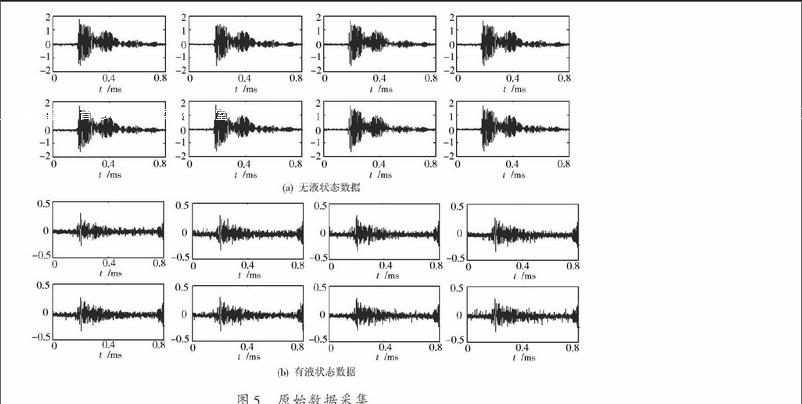
危险气体罐车液位计算机视觉监控识别报警系统的软件开发建立在嵌入式Linux开发系统基础上,系统软件需要实现的功能包括危险气体罐车液位超声采集、能谱测量、计算机视觉图像控制、CAN通信以及A/D采样E2PROM烧写。SPI E2PROM AT25HP512用于DSP的程序加载,正确配置DSP的SPI寄存器,采用DIP封装实现程序加载,根据上述软件开发环境,发送WREN指令直接通过烧写器烧写,进行危险气体罐车液位计算机视觉监控识别报警系统的仿真测试。首先采用层次聚类方法在计算机视觉环境下进行液位状态数据采集,然后进行信号转换,得到有液状态和无液状态下的采集结果如图5所示。
对上述原始数据进行信号处理,采用自适应滤波电路进行有用信息提取,得到提取结果如图6所示。
监控识别,由图6可见,采用本文设计的系统进行危险气体罐车的液位检测,在计算机视觉下能实时准确检测液位值,实现准确的监控识别和报警,性能可靠稳定。
4 结 语
本文进行了危险气体罐车液位计算机视觉监控识别报警系统优化设计,利用不同液位状态下声波在不同罐体环境中的传播特征的差异性,进行声波在不同罐体环境中的传播的差异性特征提取,判定液位状态。进行系统的硬件设计和软件设计,包括A/D采样电路、时钟电路、滤波电路、程序加载电路和电源电路等。通过危险气体罐车液位检测系统输入的参考信号对有液和无液的状态进行区别检测,采用计算机视觉监测方法,进行危险气体罐车液位内部状态特征的视觉监测。研究表明,该系统具有较好的液位检测性能,实现危险气体罐车液位的有效监控识别报警,具有较好的应用价值。
参考文献
[1] 刘茂旭,何怡刚,邓芳明,等.融合RFID的无线湿度传感器节点设计研究[J].电子测量与仪器学报,2015,29(8):1171?1178.
[2] 吕富勇,周瑞卿,阮世阳,等.高频磁场检测中采样保持器的设计及其性能分析[J].电子测量技术,2015,38(8):13?16.
[3] 郭静波,谭博,蔡雄.基于反相双峰指数模型的微弱瞬态极低频信号的估计与检测[J].仪器仪表学报,2015,36(8):1682?1691.
[4] JAFAR S A. Interference alignment: A new look at signal dimensions in a communication network [J]. Foundations and trends in communications and information theory, 2011, 7(1): 129?134.
[5] GOMA/DAM K, CA/DAMBE V R, JAFAR S A. A distributed numerical approach to interference alignment and applications to wireless interference networks [J]. IEEE transactions on information theory, 2011, 57(6): 3309?3322.
[6] PATCHARAMANEEPAKRON P, ARMOUR S, DOUFEXI A. Coordinated beamforming schemes based on modified signal?to? leakage?plus?noise ratio precoding designs [J]. IET communications, 2015, 9(4): 558?567.
[7] KALEVA J, TOLLI A, JUNTTI M. Weighted sum rate maximization for interfering broadcast channel via successive convex approximation [C]// Proceedings of IEEE Global Communications Conference. Anaheim, USA: IEEE, 2012: 3838?3843.
[8] LIU H, DING Z G, FAN P Z, et al. Precoding design for interference suppression in multi?cell multi?user networks [J]. IET communications, 2014, 8(9): 1534?1540.
[9] RATHEESH M, DAVID M J. System?level performance of interference alignment [J]. IEEE transactions on wireless communications, 2015, 14(2): 1060?1070.
[10] 赵石磊,郭红,刘宇鹏.基于轨迹跟踪的线性时滞系统容错控制[J].信息与控制,2015,44(4):469?473.
[11] KARAMI E,DOBRE O A. Identification of SM?OFDM and AL?OFDM signals based on their second?order cyclostationarity [J]. IEEE transactions on vehicular technology, 2015, 64(3): 942?953.
猜你喜欢
物联网技术(2016年12期)2017-01-21
软件工程(2016年11期)2017-01-17
计算机应用(2016年12期)2017-01-13
中国新通信(2016年22期)2017-01-13
无线互联科技(2016年13期)2017-01-10
东方教育(2016年4期)2016-12-14
