永磁同步电机零位计算及试验验证
2020-09-10 19:12:05张帅
内燃机与配件 2020年10期
关键词:永磁同步电机
张帅


摘要:永磁同步电机以其结构简单、功率密度大、效率高而被广泛应用于现代电驱牵引系统中。为了实现对其闭环精准控制,在其控制系统中安装了旋转变压器。本文提出一种有效、简便的同步电机零点位置计算方法,并通过实际研发样机进行试验验证,论证该方法的可行性和可靠性,为确定永磁同步电机零点位置及设计旋变安装结构和旋变调零提供了理论依据和实践指导。
关键词:永磁同步电机;旋转变压器;调零计算;旋变安装设计
0 引言
永磁同步电机因其功率密度大、效率高、结构简单而被广泛应用于现代驱动系统中,为了实现对其进行闭环控制,在其控制系统中安装了监控转子位置和转速的旋转变压器,而每一台电机出厂前必须对其进行调零。为此刘红伟等人研究了电机初始零位误差对电机速度环的影响,强调了电机初始零位的重要性[1]。马爱国等人研究了电机的零位对电动汽车能耗的影响,旨在提升电动汽车行驶里程[2]。朱维杰等人重点研究了小型异步电机零点标定方法[3]。鲁浩等人开展了基于电机零位的启动测量研究,将电机零点逐步深入应用[4]。随之张静波等人先后设计了伺服电机零位调试仪和光电编码零位调试仪实现电机调零[5][6]。对于电机零点准确性要求越来越高,胡任之等人开展了同步电机零点位置偏差估计的研究[7],李智明设计了伺服电机零位校准系统[8]。在实际使用过程中存在问题,因旋变零位位置计算不准确导致安装好旋变之后无法调零,需要重新对定子进行嵌线,成本较大。目前计算电机零点位置的方法较多,但是都比较繁琐同时存在较大的误差,为此本文提出一种便捷有效的旋变调零方法,并通过实际研发样机对其进行了验证,论证该方法的可行性和可靠性,为永磁同步电机旋变调零提供了理论依据和实践指导。
1 电机结构设计
1.1 电机定转子和旋变定转子之间的位置关系
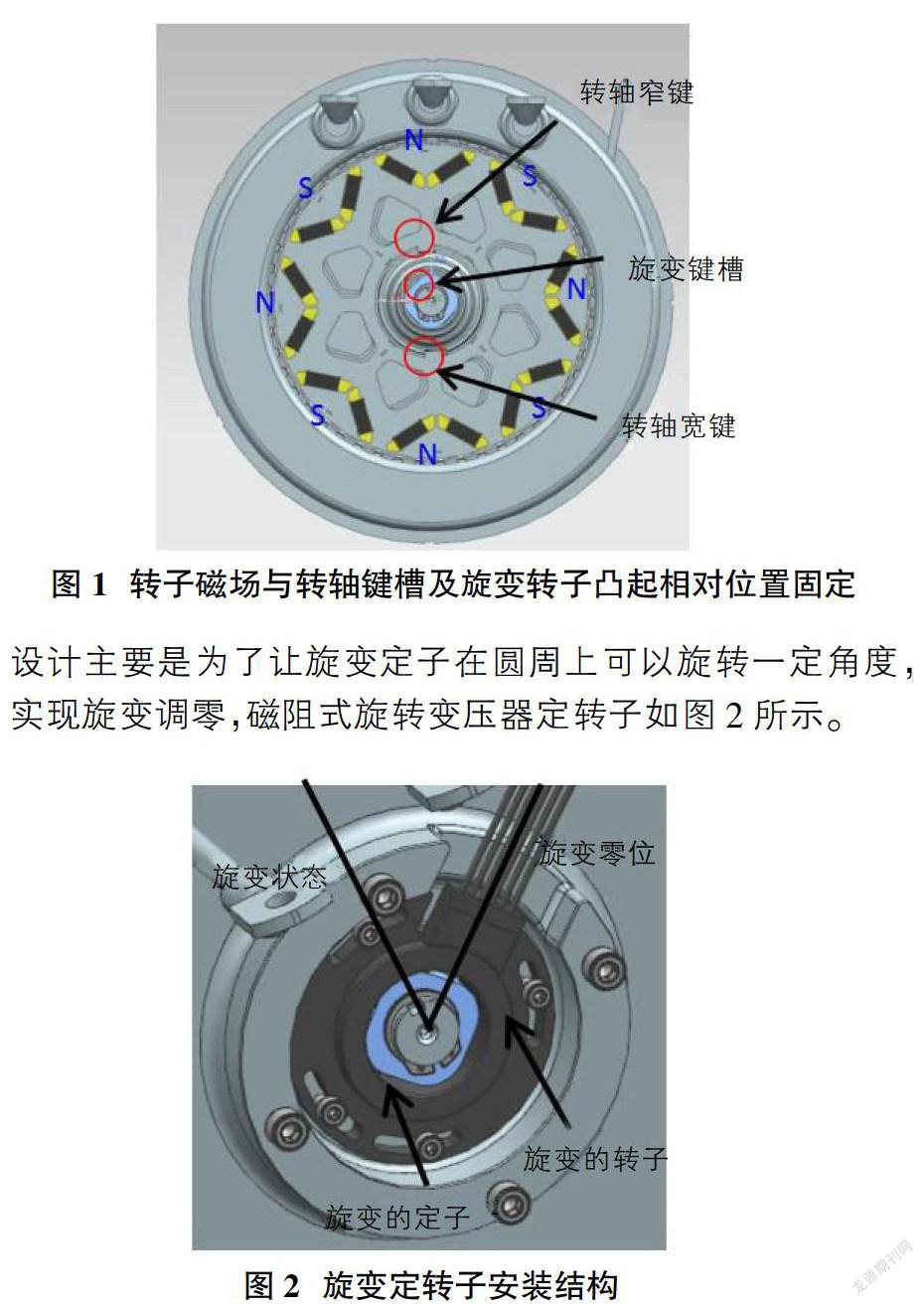
电机定子是由机座和带绕组定子铁芯组成的,二者通过键连接。带绕组定子铁芯和机座的相对位置决定了旋变定子的安装及出线位置,间接决定了旋变是否可以调到零。永磁同步电机转子主要由转子铁芯、永磁体和转轴组成,永磁体内嵌在铁芯的永磁体槽内,铁芯通过内凸键与转轴上的键槽配合固定。根据电磁方案设计转子铁芯内凸键对应的永磁体分布极性为N极沿着径向方向向外辐射。如图1所示。旋变转子通过内凸键与转轴非转矩输出端上的键槽配合固定,转子上外侧N级与旋变转子凸极对齐。固定旋变定子的螺钉穿过旋变定子上的腰形槽,将其压紧固定安装在电机机座或是某一个端盖上,腰形槽的设计主要是为了让旋变定子在圆周上可以旋转一定角度,实现旋变调零,磁阻式旋转变压器定转子如图2所示。
1.2 电机零点
电机零点指的是电机控制系统中对电机初始位置的一个识别点,作为监控电机转速和位置的量。我们可以通过给电机通直流电方式测试电机零位,然后通过调节旋变定子将此时的旋变也调至零位,完成电机零位标定。本文重点研究,V相接正极,U接负极测试电机的零位方法。一般p对极电机有p个零位。
1.3 旋变零点
旋转变压器实质上是一台磁阻式电机,p对极的旋变在其定转子相对运动一周中出现p次特征信号,把特征信号解析出的零点对应的旋变定转子位置定义为旋变的零点。旋变厂商一般会把旋变的转子的凸极与旋变定子出線端中轴线对齐规定为旋变的零点,如图2所示。此时旋变电角度为0°,旋变转子机械正方向旋转一周,电角度由0°~360°变化p次。
2 电机零点计算
电机零点的影响因素主要有定子的嵌线原理、电机直流电通电方式及定子铁芯相对机座的位置关系。嵌线原理决定了线圈通电后的磁场分布,电机直流通电方式决定了调节零点时的定子磁场分布,定子铁芯相对于机座的位置决定了旋变定子安装及出现位置,决定了旋变是否可以顺利调零。
本文采取右手螺旋定则判断电机通直流电后电机定子所产生的稳定磁场分布,在定子磁场作用下,转子会发生一定角度的转动,最终静止在某个位置上,此时定子所产生的磁场和转子永磁体分布磁场相匹配,即定子分布的S极和转子分布的N极相互吸引。安装在转子转轴上的旋变转子也随之静止下来,此时调节旋变定子使旋变显示为零位。以下以某型号电机为例计算其零位。
电机U接负V接正,当转子与定子磁场相互作用停止时,转子N极所对应的位置就是电机的零点。
磁场叠加分析,根据右手螺旋定则分别判断通电后U相线圈的磁场分布,如图3a所示,V相线圈的磁场分布,如图3b所示,最终合成磁场零点及其在带绕组定子铁芯上的分布如图4所示。
3 电机旋变安装结构设计
旋变转子外凸部分和其N极方向相对应,定子引出线位置需要正对在转子外凸部分,所以在机座或是端盖上固定旋变定子的结构需要参考此位置确定。以3中例子,当V+U-时电机出现4个零点如图4所示,可通过调节旋变定子出线位置定在4个零点位置处,此时旋变可以调为零点。图4即按照此方法设计旋变定子安装结构及出线位置,并作了验证。
4 试验验证
4.1 电机零点位置理论计算
某款永磁同步电机采用48槽,4路并联,12组线圈,每组4个线圈,其嵌线原理图U相如图5所示,VW两项同理U相顺时针旋转嵌线。该两种嵌线原理图都采用双层嵌线,都是4对级电机,故有4个电机零点。
对于该电机分别采取不同的通直流电方案进行电机零点计算,根据上文计算方法确定电机零点,如表1所示。
4.2 试验验证
对该型号永磁同步电机按照上述方法进行计算并设计旋变安装结构做出样机,进行旋变调零试验验证,如图6所示。
该旋变型号为J74XU9734A-L4,其旋变图纸及旋变零点位置如图4所示,属于正常旋变零点位置。转子结构如图1所示。旋变出线中线与水平夹角41°(内侧)。
从后端盖可以看出旋变出线口的方位为非轴伸端看去第一象限与水平夹角41°。结合带绕组定子铁芯其电机零点在整机上分布如图7所示。
U+V-:24号槽计算零点,360/48*(28-24)=30°,电角度30*4=120°显示120°或是240°;
V+W-:28号槽计算零点,显示0°或是360°(目前该电机是按照此方式旋变调零);
U-V+:30号槽计算零点,360/48*(30-28)=15°,电角度15*4=60°,显示60°或是300°。
试验过程中电机旋变角度记录如表2 所示。
以上计算结果都是旋变定子出线在引出线孔中心位置时计算设备检测显示的旋变角度绝对值,通过离旋变出线位置最近的一个电机零点计算的。
5 结论
本文通过介绍永磁同步电机零点和旋变零点,提出一种通过直流通电方式寻找电机零点的方法,给出旋变安装结构设计的指导意见,同时通过某款电机实际验证了电机零点和旋变调零过程的可行性和可靠性。
参考文献:
[1]刘红伟,范永坤,等.初始零位误差对永磁同步电机速度环的影响[J].微电机,2014,3.
[2]马爱国,周秉福,赵梓君,张鑫.电机零位对电动汽车能耗影响研究[J].客车技术与研究,2019,10.
[3]朱维杰.仪表用小型步进电机零位标定方法[J].电机技术,2009,8.
[4]鲁浩,孙建忠,娄伟,吴慎华.基于旋转变压器零位检测的SRM起动策略研究[J].微电机,2014,3.
[5]张静波,艾武.伺服电机编码器零点调试仪的设计[J].微电机,2012,3.
[6]张静波.光电编码器相位零点调试仪设计与实现[D].武汉:华中科技大学,2012,1.
[7]胡任之,徐永向,王宝超,邹继斌.永磁同步电动机位置传感器零位偏差估计方法[J].微电机,2009,42.
[8]李智明.私服电机绝对式编码器零位校准系统的设计与实现[D].武汉:华中科技大学,2018,5.
猜你喜欢
现代电子技术(2017年1期)2017-02-16 11:49:32
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
中国科技博览(2016年15期)2016-08-23 00:59:37
电脑知识与技术(2016年13期)2016-06-29 21:41:37
科技视界(2016年12期)2016-05-25 11:07:56
电脑知识与技术(2016年2期)2016-03-22 22:21:46
电脑知识与技术(2016年1期)2016-03-22 15:49:38
哈尔滨理工大学学报(2015年6期)2016-02-18 00:26:49