烟机推手机构的动力学建模及仿真
2020-09-10 22:23田晓鸿
内燃机与配件 2020年6期
关键词:动态分析

摘要:目的:为满足某推烟包装机工艺设计要求,传送速度达到1000包/min。方法:对原推烟机构(以下称为推烟机构Ⅰ型)进行机构拆解,并建立其动力学模型,同时对其进行动态分析。结果:通过分析不同速度下推手机构的位移、速度、加速度的运动曲线图,获得推手F处X,Y两个方向的速度分量V61和V62,为使机构平稳运行,必须优化设计,使得推手在该点处的加速度为0。
关键词:推手机构;动力性模型;动态分析
0 引言
烟草包装机(Ⅰ型)是目前国际烟草企业广泛运用的主流包装机,为上个世纪从国外引入的产品。由凸轮连杆机构、四杆机构、曲柄连杆机构、五杆机构构成的推手机构是本文中研究的重点。
1 推手机构的结构及原理
烟草高速包装机(Ⅰ型)是由烟库、烟支输送导軌、铝箔纸系统和卷筒供给系统、铝箔烟包折叠推手、商标烟包输送导轨、第一干燥轮、烟包输送轮和第二干燥轮等组成。各机构进行弹性连接并平稳运行,每分钟可传送600-1000包香烟,工作状况良好。
2 对推手机构进行动力学建模
本文采用凯恩动力学方程对推手机构进行动力学建模,凯恩动力学方程具体描述见王红英的《平面五杆机构运动学和动力学特性分析》参考文献,文献详细给出了凯恩动力学建模的概念和表达式,参考文献建立本文中推手机构的动力学模型,文中分别建立了曲柄滑块机构的动力学模型,四杆机构和五杆机构的动力学模型。
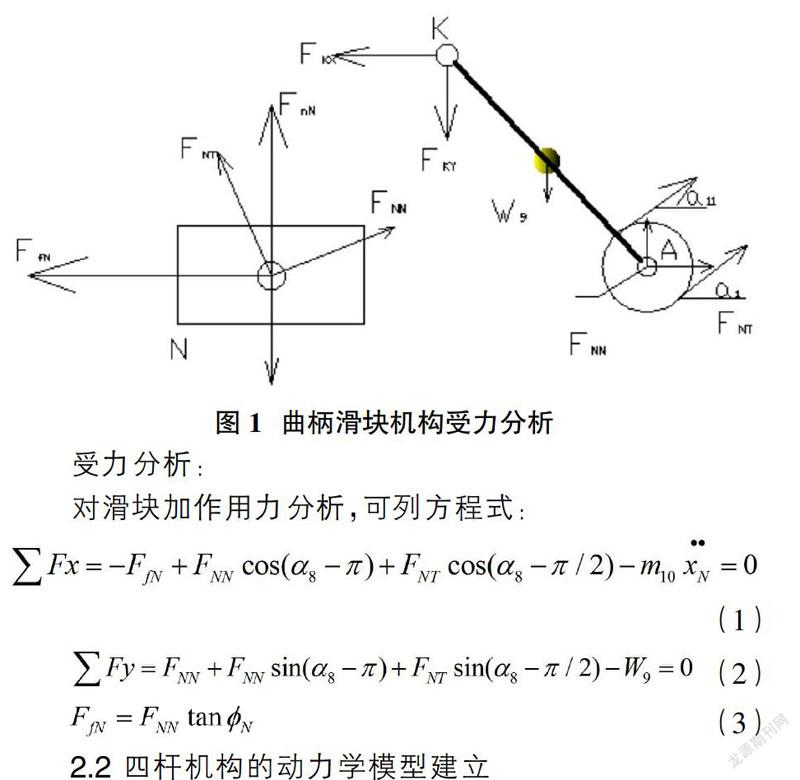
2.1 曲柄滑块机构动力学模型建立
对曲柄滑块机构进行建模,如图1所示。
受力分析:
对滑块加作用力分析,可列方程式:
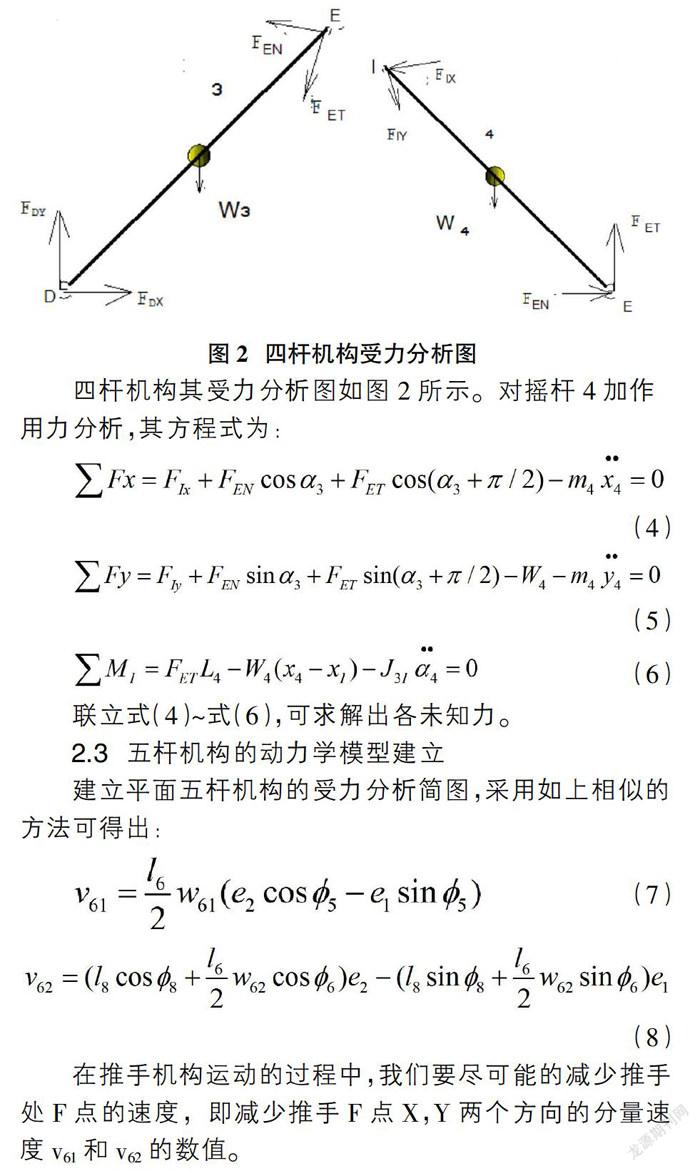
2.2 四杆机构的动力学模型建立
四杆机构其受力分析图如图2所示。对摇杆4加作用力分析,其方程式为:
联立式(4)~式(6),可求解出各未知力。
2.3 五杆机构的动力学模型建立
建立平面五杆机构的受力分析简图,采用如上相似的方法可得出:
在推手机构运动的过程中,我们要尽可能的减少推手处F点的速度,即减少推手F点X,Y两个方向的分量速度v61和v62的数值。
3 计算实例
本文参照之前对推手机构的研究方法,在凸轮机构处填加动力源,根据之前的研究经验,推手每分钟传送600包香烟的速度比较缓慢,推手的运动比较平稳,其噪声和振动对推手机构的影响较小,因次,在本文中直接对每分钟传送800包和1000包香烟进行研究,即设置主轴每分钟转动400转和500转,点击运行。分别获得推手每分钟传送400包和500包香烟的位移、速度、加速度的运动曲线图。(图3)
推手推烟过程主要由6个阶段组成,包括取烟、送烟、推烟、回转、避让及回程。在取烟过程中,烟支在传送带的作用下从烟库中取出,为了减少烟支在此过程过程中受到的损伤,烟支与传送带之间的最佳角度应为90度。推烟阶段,是一个合成运动,包括烟支的自身运动及推手对烟支的推送运动。在推烟机构传送过程中,为了防止推烟运动过程中损坏己传送的烟支,推手需先朝后上方运行一段距离。
分析加速度的变化情况,每分钟传送1000包香烟时其加速度突变更大,且加速度运动呈不规律分布。表示在推手F点处惯性力突变大,振动大。因此参考前面的动力学模型建立,我们需要找到平衡点——速度最大点。
在推烟进程中,为保证烟支完好无损,我们就得较低推手接近烟支时的速度,即对应前面的推导,我们要尽量减小推手F点X,Y两个方向的分量速度v61和v62,这就需要我们借助数学编程对推手机构进行优化设计。
4 结论
推烟包装机推手机构是凸轮和连杆机构组合而成的复杂凸轮连杆的机构,文章采用单自由度的方法对推手机构进行动力学模型建立,最终获得推手F点X,Y两个方向的目标值v61和v62的数学表达式,我们可借助软件编程获得相关的计算量,同时可满足工程实际需求,用数值计算法进行推手处位移、速度、曲线的分析,可以获得推手处姿态的运行曲线图,为下一阶段进行新型机构的设计奠定了理论基础。
参考文献:
[1]洪波.包装机械的概念设计方案评选方法的研究[J].包装工程,2010(06):80-83.
[2]马永有,张辉.高速凸轮-从动系统动力学模型的建立与动态分析[J].机械,2002(29):7-9.
[3]田晓鸿,李龙,曹巨江.推烟包装机推手装置的解析法设计[C].第9届中国机构与机器科学应用国际会议暨中国轻工机械协会科技研讨会论文集,2011,10:60-63.
[4]于红英,唐德威,王建宇.平面五杆机构运动学和动力学特性分析[J].哈尔滨工业大学学报,2007,6(39):940-943.
作者简介:田晓鸿(1984-),女,陕西榆林人,硕士,讲师,西安航空职业技术学院,主要研究方向为包装机械、新能源汽车技术。
猜你喜欢
现代电子技术(2016年23期)2017-01-12
对外经贸(2016年8期)2016-12-13
商业会计(2016年18期)2016-11-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年17期)2016-07-23
中国实用医药(2016年14期)2016-05-20
考试周刊(2016年4期)2016-03-14
湖北农业科学(2015年16期)2015-10-28
企业文化·中旬刊(2015年6期)2015-06-25
企业文化·中旬刊(2015年4期)2015-05-07