多轴振动与冲击复合环境试验技术分析
2020-09-10 07:22刘磊
中国化工贸易·上旬刊 2020年1期
关键词:试验方法
刘磊
摘 要:探究多轴振动和冲击的多力学复合状态测试技术。经过对测试系统的建立、测试控制计划和振动与冲击信息的解耦等展开深度探究,介绍了信号分离方法,并规划了信号分离器,把信号分离器视为闭环管理的一个关键环节,能够有效解耦振动和冲击信号。信号分离器的工作精度满足预期成效,得到了振动和冲击的即时解耦遇与实时把控,提升了冲击测试的管理精度。经过试验检验,采用的方法可行,具备一定使用价值。
关键词:多轴振动;冲击信号;试验方法
伴随防空导弹的不断发展,其战绩指标不断提高,导弹的规划余量越来越小,该种状况下,地表模拟试验检验的准确性显得十分关键。针对有设计缺陷和工艺问题的导弹,产品不得误判,不得下降产品的飞行稳定性,而且针对复合环境适应性需要的导弹产品,也保证不得误判,防止引起资源浪费与研制时间的延迟。所以,尽可能模拟导弹的准确环境,展开地表模拟验证,是当前环境试验方法的一个关键发展趋势。
1 多轴振动和冲击复合测试系统建立计划
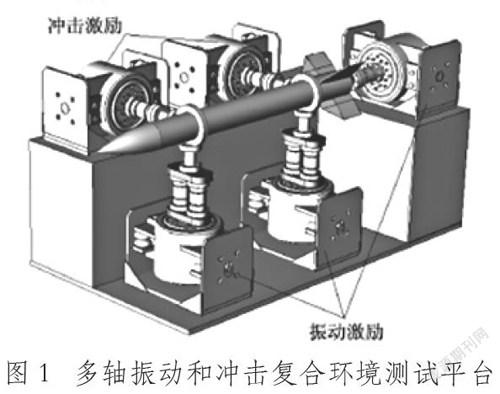
本文对于细长试件建立一套系统(如图1所示)。横侧面的2个激振器加上冲击载荷,垂直向与轴向的3个激振器加上振动载荷,其是1个五自由度测试系统,甚至试件的走向与垂直向能得到线性振动,绕横侧轴能得到角振动,顺横侧轴能得到线性冲击,绕垂直轴能得到角冲击。这一系统有以下特征:
图1 多轴振动和冲击复合环境测试平台
1.1 振动平面垂直于冲击平面
当位移较小时,冲击方向一直垂直于振动方向,所以在一阶谐振频率之下,振动和冲击的耦合性较小,能够忽视不计。但在一阶频率之上,因为试件的柔性改变,振动与冲击的耦合性将较大,给试验管理造成巨大困难。
1.2 试验系统是静定系统
为处理系统的可靠性,提升系统线性度与时不变性,于两个垂直振动机上分布了双球头并联设备,该设备把绕轴向运转的自由度做出了刚性限制,而且又不干扰其他方位的解耦,经过该设计得到了试验件自由度的总量和激励点的总量相同,把静不定系统调整成静定系统,大幅度提升了多轴振动和冲击复合环测试的管理精度,下降了管理困难性。
2 多轴振动和冲击复合试验管理技术
2.1 振动和冲击的交叉耦合
文章提供的系统建立计划,振动所处平面垂直于冲击所处平面,若试件属于刚体,振动和冲击是不会产生干扰的,唯有试件体现出柔性,才会造成振动和冲击交叉耦合[1]。试件于一击频率之下体现出,刚性振动和冲击为耦合起来,在一阶频率之上,试件将出现柔性变化,振动和冲击有很明显的交叉耦合。所以,耦合至冲击响应时的振动信号它的下限频率均是试件的一阶频率。
总之,针对常见冲击试验,冲击和振动的耦合有两种现象:①试件的一阶频率超过冲击信号的上限频率。这时耦合至冲击响应时的振动分量下限频率会超过冲击信号的上限频率,而冲击频率和振动频率未出现叠合;②试件一阶频率低于冲击信号上限频率。这时耦合至冲击响应时的振动分量下限频率会低于冲击信号上限频率,而冲击频率和振动频率会出现混叠。
因为冲击响应谱测试的频率范围较宽,第一种现象是没有的,只有第二种现象。所以,冲击响应时的振动分量和冲击分量必定出现频率混叠。针对半正弦冲击,能把9/2D视为上限频率,超过9/2D的频率成分能忽视。针对其他种类的冲击试验,因为冲击能量伴随频率加大衰减略慢一点,能适当提升上限频率。常见的冲击能量重点集中于低频,即大多数能量处在试件的一阶频率之下,其耦合至振动响应时的能量较小,能够忽视不计。若是冲击响应谱试验,冲击时对振动的影响将较大,但是因为冲击时间较短,只需2次冲击时间距离够长,振动响应将逐步均衡至试验需要值。所以,文章只考量了振动对冲击的作用,而并未考量冲击对振动的干扰。
2.2 试验控制计划
MIMO振动与MIMO冲击的管理原理不一样,需要采取两个单独的控制仪逐一把控,因为试验环节,振动和冲击有交叉耦合情况,两个控制仪单独控制,不能得到冲击和振动的解耦,因此对试验管理的影响很大。
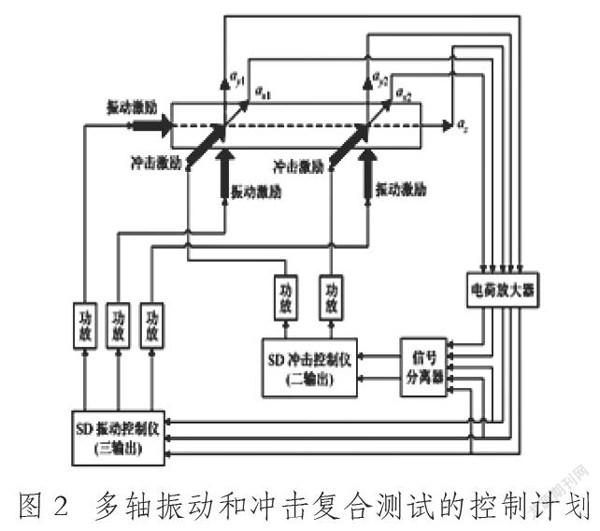
图2 多轴振动和冲击复合测试的控制计划
此处对冲击和振动的解耦方式进行了探究,提出了图2上的试验管理计划,该计划采取两个单独的控制仪,分别把控MIMO振动及MIMO冲击,在冲击管理回路上规划了一个信号分离设备,能够把冲击响应中存在的振动分量清除。
结合上述的探讨,当试件的一阶频率超过冲击信号上限频率时,其冲击响应方面的振动频率和冲击频率未出现混叠,能够基于低通滤波把冲击信号方面的振动分量清除。当试件的一阶频率低于冲击信号上限频率时,其冲击响应方面的振动频率和冲击频率会出现混叠,滤波方式已不再适用,需要采取一种信号分离方法,有效隔离振动信号和冲击信号。对于这两种现象,信号分离设备应当归化两大模块,得到两个功能:低通滤波和信号分离。能结合不同现象,选取不同的功能和其组合展开测试,达到最佳的测试效果。
因为有交叉藕合,造成冲击管理点的响应存在两大分量:冲击激励形成的冲击响应与振动激励形成的振动响应。信号隔离器具备实时输入与实时输出的作用,其作用即清除冲击管理点响应信号中存在的振动和数量,且把清洁的冲击信号反馈至冲击管理器产生闭环管理[2]。所以,图2表示的闭环控制计划并未清理冲击管理点的振动信号,即是对其展开隔离,管理器呈现的冲击曲线并非是冲击管理点的具体响应曲线,其是由冲击激励形成的冲击响应数量。
针对多轴振动和冲击复合环境测试方法,需要得到的便是振动激励与冲击激励共同影响下形成的复合环境,冲击信号具有振动响应就是人们所要的。文章关键的目标是:确保振动激励与振动管理点上形成的振动响应与冲击激励于冲击管理点上形成的冲击响应分别满足设计需要。
2.3 信号分离器的规划原理
信號分离的途径较多,其中使用最普遍的两种办法即盲源信号分离法与单独分量分析信号隔离法,这两种办法以较为成熟,常用做故障诊断、语音、通讯和图像处置等方面。其有一个相同特征,即仅能获得与原始信号波形相同但幅值有明显差别的信号,这一点无法符合文章对信号分离方法的需要[3]。文章采取的信号分离方法是依靠篇相干理论出现的,该种方法能够完全复原初始信号。
冲击信号中存在的振动分量是通过振动激励形成的,因此振动信号内的振动分量和振动激励信号是有关的,而且因为采取两个控制单独管理,振动激励和冲击相应信号是无关的,所以,信号分离器设计的原理为采用偏相关理论,把冲击信号中和三个振动激励信号有关的分量清除。
3 结论
信号分离器的规划原理是依靠相干函数,其中相干函数就是体现信号间线性关联的函数,若系统的非线性因素很多,造成输出和输入之间相干性很差,信号分离器的工作精度会明显降低,所以,在规划系统搭建计划时要尽量减少非线性出现的因素,图1上的双球头并联设备就是为提升系统线性度而规划的。
试验表明,每次冲击加载时,振动管理曲线基本无变化,而振动对冲击的作用较大,冲击曲线存在许多振动和数量。所以,在控制计划上未考量冲击对振动的干扰是准确的。信号分离器能够有效清除振动数量,冲击管理过程稳定,因此闭环管理计划是完全有效的。
参考文献:
[1]邹学利,李宏民,王海燕.多轴振动与冲击复合环境试验技术研究[J].振动与冲击,2019,38(03):237-243+278.
[2]林先松.多轴振动台架在道路载荷模拟试验中的应用[J].机电技术,2018(01):83-84+100.
[3]谢子东.基于模型的多轴振动台动力学解耦控制研究[D].哈尔滨:哈尔滨工业大学,2017.
猜你喜欢
卷宗(2016年10期)2017-01-21
中华建设科技(2016年11期)2017-01-06
科学与财富(2016年26期)2016-12-01
科技视界(2016年2期)2016-03-30
中小企业管理与科技·中旬刊(2016年1期)2016-03-16
中国高新技术企业(2015年24期)2015-06-25
科技与创新(2015年3期)2015-03-31
中国纤检(2015年3期)2015-03-13