
机械结构形态知识融合
2020-09-10 08:05:04徐赐军李炜龙黄松林
计算机集成制造系统 2020年8期
徐赐军,李炜龙,2,黄松林
(1.湖北理工学院 机电工程学院,湖北 黄石 435003;2.武汉科技大学 机械自动化学院,湖北 武汉 430081)
0 引言
机械结构形态是机械结构三维模型的特征简化方法,主要采用线、面的几何元素描述机械结构的形状、功能和拓扑关系。机械结构形态由基本体形态组成,但基本体形态在基本体几何特征简化过程中仅保留其抽象结构,若依据机械结构三维模型布尔运算关系构建机械结构形态三维模型模型,则部分基本体形态会存在相对孤立或信息不全的问题[1]。因此,在基本体形态组合成机械结构形态过程中,必须利用基本体形态知识特点对其进行有机融合。
知识融合是将多源知识进行转换、集成和合并处理后获得新知识,目前知识融合主要针对大数据背景下的知识源进行融合算法的相关技术研究。Fan等[2]分析了知识融合的内涵及其实现模式,研究了面向知识服务要求的一维和二维知识融合过程模型;Smirnov等[3]研究了情景感知决策支持系统的知识融合过程,提出基于情景的知识融合模式;Akhlaghi等[4]针对分布式网络的知识提出基于统计方法的前馈神经网络知识融合方法;Kriegel等[5]针对安全报警决策支持系统设计了可独立应用的知识融合工具包;Fisch等[6]采用多项式分布和多变量正态分布的概率分类器在分类规则参数层面提出数据挖掘应用中的新融合分类方法;周芳等[7]针对多源知识讨论了基于Bayes准则、基于D-S证据理论和基于模糊集理论轮的知识融合算法;徐赐军等提出包含知识融合算法及融合知识后处理等功能模块的知识融合框架[8],分析了融合知识测度指标在知识融合应用中的作用[9]。
许多学者针对知识融合在各专业领域(如机械设计、制造等)中的应用进行了大量研究。Liu等[10]针对云制造环境下集团公司分布式异构知识源提出支持知识融合和服务的知识组织与表达模型,提高了知识源的利用效率和知识服务质量;Ringsquandl等[11]针对制造系统的监控适应性和控制不断变化的环境因素问题,根据现有制造知识图谱和运行数据提出语义同步的表征学习模型,实现了制造运行数据的知识融合;刘骄剑等[12]通过分析扩散制造工艺设计知识内涵提出一种基于知识融合的定型工艺调整方法;朱玉屏等[13]针对机械产品设计中的知识融合问题提出基于模糊证据理论的融合推理方法,并建立了基于本体的产品设计知识模型;宫琳等[14]通过定义产品、功能、结构的过程模型和知识模型,提出将设计过程和设计知识融合的产品概念设计方法。除了设计知识、制造信息等融合外,有学者利用三维CAD软件知识融合模块和二次开发功能实现知识驱动的建模技术。Fabio等[15]应用NX CAD软件的知识融合模块实现了自动喷涂缺陷检测通道的自动化设计;刘忠途等[16]结合三维CAD系统将工程问题和任务分解为知识项,再分解到知识约束,构建了设计知识融合驱动的知识约束模型;陈珂等[17]利用CAD系统的二次开发功能开发,基于知识融合的有限元分析(Finite Element Analysis,FEA)建模技术,构建了基于知识融合的FEA自动化任务分析机制。
从上述研究可以发现,知识融合研究尚未构建通用性很强的统一框架融合技术,无法直接借鉴现有知识融合规则解决机械结构形态三维建模过程中基本体形态孤立的问题。另一方面,CAD系统的知识融合主要侧重设计知识的融入,对三维建模过程中孤立性特征知识的融合有待进一步研究。
机械结构形态三维模型构建及其知识存储主要服务于机械结构三维模型的自动检索。在当前的三维模型检索算法研究中,每次检索均要重新计算模型库中的模型轮廓、拓扑结构、特征属性等相关信息,大大降低了检索效率。另一方面,机械设计不再仅为机械设计专业人员的工作,还有大量非机械专业设计人员参与其中,非机械专业人员虽然因缺乏机械专业知识而很难设计出合理的机械,但是其对满足其功能设计要求的机械往往有一个大概的设计形态意识。不同领域的机械设计人员通过功能分析进行机械结构形态设计,检索与其形态相似的CAD模型即可完善该结构形态的结构设计。因此,应用机械结构形态知识不但有利于避免三维模型检索过程中重复处理原CAD模型信息,而且拓宽了不同领域机械设计人员的交流,提高了三维模型的重用率。因此,本文针对机械结构形态三维建模过程中存在特征孤立的问题,对机械结构形态的知识表示及其融合规则进行研究。
1 机械结构形态知识
1.1 基于本体的机械结构形态知识转换
构建机械结构形态首先要采用基本体转换模型对不同建模方法完成的基本体进行模型统一表达,然后根据基本体转换模型的尺寸关系等形态提取规则获取基本体形态[18]。机械结构形态与机械结构三维模型之间的知识转换过程如图1所示。机械结构形态知识转换以机械结构形态领域本体为基础,本文采用巴斯科范式(Backus Normal Form,BNF)本体描述结构构建该领域的概念库、关系库、属性库、规则库,并规范机械结构在不同三维软件建模过程中的术语[8]。

图1显示,若已知机械结构三维模型,则将其分解成若干基本体三维模型,然后通过解析基本体特征获得基本体转换模型知识,并通过该转换模型的基面选取、形态提取等构建规则获取机械结构形态元知识,最后通过该元知识之间的融合规则形成机械结构形态知识。若已知机械结构形态知识,则通过该形态知识表示规则搜索相关的机械结构形态元知识,由知识推理获得相应的基本体转换模型知识,然后根据转换模型的建模要素直接构建相应的基本体三维模型,并根据机械结构形态的布尔运算规则构建机械结构三维模型。基本体三维模型与机械结构三维模型的知识表示及其分解规则、运算规则等均采用三维建模软件的内部表示结构。若机械结构三维模型及机械结构形态的模型库均已构建,则直接通过基于机械结构形态的三维模型检索算法及其模型映射关系获得设计人员需要的机械结构三维模型。针对图1所示的机械结构形态知识转换关系,本文重点研究由机械结构形态元知识转换成机械结构形态知识的知识融合规则。
1.2 基本体转换模型知识表示
根据基本体的不同特征,三维建模所采用的方法也不同,如柱体采用拉伸、圆锥采用旋转等,因此上述建模方法很难用现成的模型统一表达。本文将各基本体模型统一采用基本体转换模型来表达,即将所有基本体均采用转换或拟合的方法统一成扫掠方式的表达模型。该模型包括扫掠基面、扫掠导线和轮廓约束线三要素,如图2a所示的棱柱基本体转换模型三要素分别为扫掠基面面G1、扫掠导线ab和轮廓约束线cd。

因此,本文将基本体转换模型知识表示为
P(ID,FT,Fi,Ti,Ci)。
其中:ID为基本体的编号,是基本体在机械结构中的唯一标识符,并按建模过程的顺序编号;FT为基本体的建模属性,若机械机构三维建模过程中的基本体为增材基本体则FT=1,若基本体为减材基本体则FT=-1;Fi,Ti,Ci为基本体转换模型的三要素,分别表示第i基本体采用扫掠建模时的扫掠基面、扫掠导线和轮廓约束线,若基面在沿扫掠导线运动过程中无缩放且绕导线无旋转,则Ci可为空。减材基本体、增材基本体分别指机械结构建模过程中以移除材料和添加材料方式完成建模的基本体。
1.3 机械结构形态元知识表示
元知识的概念尚未有统一的形式化定义,一般理解为“关于知识的知识”,即专门用来显性地描述知识库中知识元素特征的知识元素实体[19]。机械结构三维模型可以分解成若干基本体,根据其对应的拓扑关系,机械结构形态也由若干基本体形态组成,因此机械结构形态元知识由基本体形态属性知识构成。由图2b可知,基本体形态主要根据基本体转换模型所确定的选择规则提取而成[18]。因此,基于基本体转换模型知识表示的方法,机械结构形态元知识表示定义为
M(ID,FE,{Fi,Ti,Li,Si})。
其中:ID为基本体形态的编号;FE为基本体形态的类型,基本体形态为实线线形态、实线轮廓面形态和虚线线形态、虚线轮廓面形态时,该参数分别为1,2,-1,-2,而0表示融合形态;Fi,Ti分别表示第i基本体采用扫掠建模时的扫掠基面和扫掠导线;Li表示基面的最长边;Si表示最长边沿扫掠导线在轮廓约束线条件下形成的扫掠面;{Fi,Ti,Li,Si}表示第i基本体的形态为Fi,Ti,Li,Si中的一种。ID若为独立编号,则该序号与基本体编号对应;若为组合编号,则表示融合形态的两个基本体形态编号的组合。例如,ID编号为i表示第i个基本体的形态编号,ID编号为i∧j表示第i个基本体与第j个基本体的关联融合形态编号。减材基本体、增材基本体的形态轮廓分别用虚线和实线表示。
1.4 机械结构形态知识表示
机械结构形态主要体现结构的功能设计,反映结构基本体的空间几何关系,且与原始结构保持相同的拓扑关系,减少了原始结构图的冗余信息。机械结构形态是由基本体形态通过各种融合规则有机结合的整体,为了体现机械结构形态元知识融合的结果,本文将机械结构形态知识表示为
MSM({M},{∧M},{∨M})。
其中:{M}为基本体形态融合后未做任何变换的融合形态集合;{∧M}为基本体形态融合过程中根据关联规则形成的关联形态集合;{∨M}为基本体形态融合过程中根据吸收规则对原形态变换后形成的形态集合,该形态编号与原形态相关。上述形态集合均采用形态对应的形态编号表示。
2 机械结构形态知识融合规则
机械结构形态知识融合规则的主要作用是根据机械结构拓扑关系和基本体形态结构特征,将机械结构形态元知识有机融合成一个完整的形态模型。融合规则主要包括包容规则、叠加规则、关联规则和吸收规则,各融合规则示例如表1所示。

表1 融合规则示例
2.1 包容规则
若减材基本体形态与增材基本体形态均为线形态且前者被后者包容,则融合形态为增材基本体形态,包容规则表示如下:
IF (M(j,-1,{Tj,Lj})∈M(i,1,{Ti,Li}))
THEN (M(i,1,{Ti,Li}))
包容规则的主要功能是:基本体形态进行融合运算后,一个基本体的形态包容在另一个基本体形态中,融合形态为其中一个基本体形态。包容规则实现的知识转换过程表示为
M(i,1,{Ti,Li})-M(j,-1,{Tj,Lj})
=MSM(i-j)。
(1)
其中i-j表示第i个基本体形态包容第j个基本体形态的融合形态编号。
根据包容规则的表示,融合后的机械结构形态元知识为
M(i-j,0,{Ti-j,Li-j})=M(i,1,{Ti,Lj})。
(2)
表1示例1的机械结构由两个基本体通过“差”运算构建而成,且两个基本体同轴。根据基本体形态构建规则,本示例两个基本体形态均为线形态且重合,因此减材基本体形态被增材基本体形态包容,即机械结构形态为增材基本体形态,如示例1的机械结构形态所示。
2.2 叠加规则
若两个基本体及其形态均相交,则其形态在融合后的机械结构形态按照原始空间状态直接累加,叠加规则表示如下:
IF(P(j,FT,Fj,Tj,Cj)∩P(i,FT,Fi,Ti,Ci)≠φ&M(j,FE,{Fj,Tj,Lj,Sj})∩M(i,FE,{Fi,Ti,Li,Si})≠φ)
THEN(M(i,FE,{Fi,Ti,Li,Si}),M(j,FE,{Fj,Tj,Lj,Sj}))
叠加规则的应用范围是有增材基本体参与的形态融合。虽然减材基本体形态相互之间也存在相交的关系,但由于减材基本体的造型要依附于增材基本体,即减材基本体形态至少与一个增材基本体形态关联,因此,应用叠加规则时不考虑减材基本体相互之间的形态融合。
叠加规则的主要功能是:基本体形态按照原始空间状态直接累加。该规则实现的知识转换过程表示如下:
M(i,FE,{Fi,Ti,Li,Si})+M(j,FE,
{Fj,Tj,Lj,Sj})=MSM(i,j)。
(3)
根据叠加规则的表示,融合前、后的机械结构形态元知识表示方式不变。
表1示例2的机械结构由两个基本体通过“并”运算构建而成,而且两个基本体同轴。根据基本体形态构建规则,本示例两个基本体形态均为线形态且共线,因此该示例的机械结构形态直接叠加,如示例2的机械结构形态所示。
2.3 关联规则
相交的两个基本体的形态融合,若两个增材基本体形态为线形态,且线形态两端对应的端点所在面相交,则以形态相应的两端点为端点构建关联线形态;否则,以两个基本体形态的最短距离构建关联线形态,关联规则表示如下:
IF (P(j,FT,Fj,Tj,Cj)∩P(i,FT,Fi,Ti,Ci)≠
φ&M(j,1,{Tj,Lj})∩M(i,1,{Ti,Li})=φ&
F(Ei∈M(i,1{Ti,Li})∩F(Ej∈
M(j,1{Tj,Lj})≠φ)
THEN(M(i∧j,0,EiEj))

若两个基本体在三维模型构建过程中相交,则其对应的基本体形态必然关联。关联规则的主要功能是:将相互孤立的基本体形态通过关联“线形态”构建完整的融合形态。如前所述,减材基本体相互之间也存在相交关系,但是因为减材基本体的造型要依附于增材基本体,所以减材基本体相互之间相交时,其形态无需关联,而且在减材基本体形态与增材基本体形态关联融合时均以最短距离的方式构建关联线形态。
关联规则实现的知识转换过程表示如下:
M(i,FE,{Fi,Ti,Li,Si})∧M(j,FE,
{Fj,Tj,Lj,Sj})=MSM(i∧j)。
(4)
其中i∧j表示第i个基本体形态与第j个基本体形态关联的融合形态编号。根据关联规则的表示,融合后的机械结构形态元知识为
M(i∧j,0,EiEj)

针对表1示例3和示例4所列举的机械结构,根据基本体形态构建规则可获得两个示例基本体的结构形态,如图3线段ab和cd所示。由图3可见,每个示例的基本体形态均相互孤立,但由其机械结构可知基本体之间是相互关联的。为了保证机械结构形态与机械结构的拓扑关系相同,机械结构形态必须根据关联规则将其对应的形态关联。在示例3中,由于基本体1两端面与基本体2两端面分别相交,形态两端分别产生关联形态,如表1机械结构形态图中线段ad和bc所示。示例4所示的两个基本体仅中间部分相交,因此该示例融合产生的关联形态由最短距离决定,如表1示例4机械结构形态的线段ef所示。

2.4 吸收规则
吸收规则的主要功能是:基本体形态通过改变形态类型或取其中一部分形态构成新的融合形态。吸收规则的知识转换过程表示为
M(i,FE,{Fi,Ti,Li,Si})∨M(j,
FE,{Fj,Tj,Lj,Sj})=MSM(i,j)。
由该转换过程可知,经吸收规则融合的形态,其编号与融合前的编号相同,但该编号对应的形态在融合前的形态基础上根据规则进行了适当的变换。
(1)吸收规则1
若增材基本体的面形态包含减材基本体的面形态,则基本体形态融合时减材基本体形态轮廓实线化,且与增材基本体形态叠加,吸收规则1表示如下:
IF (P(j,FT,Fj,Tj,Cj)∩P(i,FT,Fi,Ti,Ci)
≠φ&M(j,-2,{Fj,Sj})∈M(i,2,{Fi,Si}))
THEN (M(i,2,{Fi,Si}),M(j,2,{Fj,Sj}))
根据吸收规则1的表示,融合后的机械结构形态元知识仅减材基本体形态元知识的类型发生改变,即融合后的机械结构形态元知识为
M(i,2,{Fi,Si}),M(j,2,{Fj,Sj})。
表1示例5表示由增材基本体和减材基本体构成的机械结构。由基本体形态构建规则可知,该结构2两个基本体形态为面形态且存在包含关系,因此减材基本体形态轮廓实线化后如示例5的融合形态所示。减材基本体在形态融合后实线化的主要目的是说明减材基本体形态与增材基本体形态共面。由吸收规则1得到推论规则:两个共面的封闭环所表示的基本体面形态,若内环被外环包围,则内环为减材基本体,外环为增材基本体。
(2)吸收规则2
对相交的两个增材基本体所提取的基本体形态进行融合时,若两个基本体形态为线形态,且两个线形态对应的端点所在的平面相交,则两端点在其切线方向上不允许相互超出形态线,即超出形态线部分被吸收,吸收规则2表示如下:
IF(P(j,1,Fj,Tj,Cj)∩P(i,1,Fi,Ti,Ci)≠φ&F(Ei∈M(i,1(Ti,Li)i)∩F(Ej∈M(j,1(Tj,Lj))≠φ&Z(EjTo′)>0)
THEN (M(j,0,{Tj,Lj|Z(EjTo′)=max{Z(AjTo′)}})&M(i∧j,0,{EiEj|Z(EjTo′)=0}))
其中:O′为局部坐标系的原点;To′为从整体坐标系到局部坐标系的转换矩阵;Z(EjTo′)为线形态端点Ej在局部坐标系下的Z轴坐标值;Aj为线形态端点Ej到O′之间与其他形态的交点;max{Z(AjTo′)}为线形态上交点Aj在局部坐标系下Z轴坐标的最大值;EiEj为两个形态的关联线形态。

步骤1确定两个形态分别在其端点Ei和Ej
处的切向单位向量ei和ej,如图5所示。由该单位向量可求得向量u=ej×ei。
步骤2以端点Ei为原点O′,向量ei方向为X轴正向,向量u方向为Y轴正向,构建三维笛卡尔坐标系XYZ,如图6所示。

步骤3由空间向量知识易证向量ej与Z轴正向的夹角不大于90°可知,若线形态端点Ej超出端点Ei所在的形态,则端点Ej在局部坐标系XYZ下的Z轴坐标值必大于0。根据吸收规则2推理,将第j个形态的终点Ej变换到局部坐标系下Z坐标值最大的Aj处,关联形态EiEj中的终点Ej变换到局部坐标系下Z坐标值为0的节点处,如图7所示的A点。

表1示例7根据基本体形态构建规则获得的基本体结构形态如图8线段C′C和A′A所示。由图8可知,相交一端的形态相互超出对方形态线,如图8线段AB和BC所示,但两个形态相交一端的端点所在平面相交于图8所示的线段GH,即基本体的面在布尔运算一端均未超出对方,因此根据基本体形态融合的吸收原则2,该基本体形态融合后的机械结构形态如表1示例7所示。

由图8可知,表1示例7所示的两增材基本体线形态相交,且AB和BC段同侧无其他形态相交,因此根据吸收规则2的表示可知,将两形态的A点和C点均变换到交点B处。由此推理得推论规则:两个增材基本体形态均为线形态且相交,若两个线形态对应端点所在的平面相交,且同侧无其他形态相交,则将超出两条线形态交点的端点变换到该交点。
推论规则表示如下:
IF (M(j,1,{Tj,Lj})∩M(i,1,{Ti,Li})={A}&F(Ei∈M(i,1{Ti,Li})∩F(Ej∈M(j,1{Tj,Lj})≠φ)
THEN (M(j,0,{Tj,Lj|Ej→A}))
其中:A为两个形态的交点;Ej→A表示线形态端点Ej由交点A代替。
根据吸收规则2的表示,融合后的机械结构形态元知识为
(M(j,0,{Tj,Lj|Z(EjTo′)=max{Z(AjTo′)}})
和M(i∧j,0,{EiEj|Z(EjTo′)=0})。
3 机械结构形态知识融合算法
机械结构根据三维软件建模过程分解成若干基本体,通过基本体转换模型的知识表示获取各基本体的统一表达数据,并根据形态提取规则获取基本体形态的机械结构形态元知识并进行存储。针对各基本体形态构成的机械结构形态元知识数据,在三维软件中构建所有基本体形态模型,最后利用三维软件的二次开发功能开发知识融合算法,对基本体形态进行有机融合,实现机械结构形态的三维建模。融合算法流程如图9所示。

4 实例
支架是机械行业常见的结构件,根据应用特点其结构复杂程度相差较大。图10所示的支架包括18个基本体,基于PROE 5.0软件构建该支架的模型树如图11a所示。本文基本体、边、点等几何特征编号规则如下:①根据三维软件二次开发功能遍历基本体,按基本体的遍历顺序进行编号;②根据基本体转换模型的扫掠基面、扫掠导线、轮廓约束线三要素获取的几何信息,对每一个要素进行边、点的遍历,其中边采用三要素相应的遍历顺序分别独立编号方法,点采用三要素统一编号的方法。因此,支架结构首先采用Protoolkit工具包的函数ProSolidFeatVisit()遍历所有基本体特征,并按遍历顺序对基本体进行编号,如图11b所示;然后根据基本体的建模特征获取每个基本体转换模型的知识表示[18],如基本体1、基本体2的转换模型知识分别表示为P(1,1,F1,T1,C1),P(2,-1,F2,T2,C2),其中基本体转换模型三要素Fi,Ti,Ci参数如表2和表3所示。表中EdgeType为基本体转换模型或基本体形态的边类型,例如该值为1表示直线、2表示圆弧、3表示圆等,且直线类型的特征点可为空;表2中点1、点2、特征点均属于顶点,即表2中各点编号指向表3的顶点编号;表中边编号是根据每个基本体三要素边的遍历顺序分别独立编号,而顶点编号是根据三要素所有点的几何信息遍历顺序统一编号。

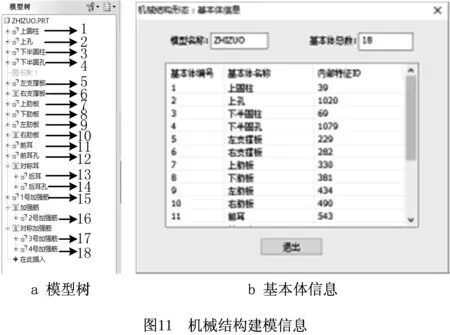
本文通过图11b中基本体编号所对应的基本体“内部特征ID”可以获取每个基本体的几何信息,并基于ProContourEdgevisit(),ProSurfaceContourvisit()等函数遍历每个基本体转换模型的的边、点等几何信息,获得机械结构形态所需的数据,如表2和表3所示。

表2 基本体转换模型参数(部分)

表3 基本转换模型顶点数据(部分)

续表3
当获取基本体转换模型知识数据后,根据机械结构基本体形态提取规则获取各基本体的形态模型,如图12所示,并将机械结构形态元知识模型数据存于知识库,部分数据如表4和表5所示。根据表4和表5的数据在三维软件中重新构建基本体形态模型,如图13所示,图中数字编号对应表4的基本体形态编号,Pi编号中数字i为点的编号。


表4 机械结构形态参数(部分)
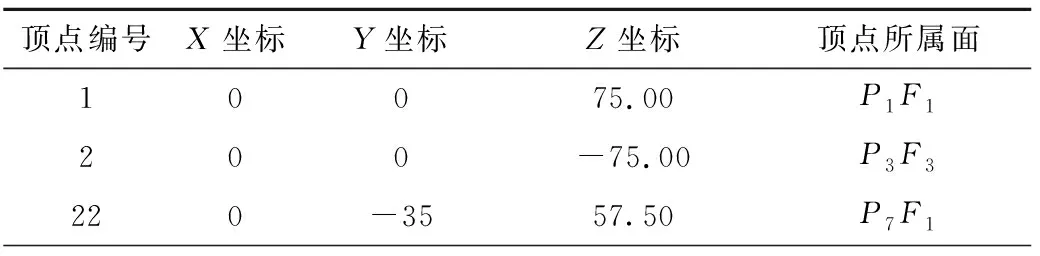
表5 机械结构形态顶点数据(部分)

续表5

针对图13的基本体形态,根据机械结构基本体的拓扑关系,采用基本体形态融合规则对其进行融合。图13所示的基本体形态1、基本体形态2满足包容原则,因此融合后机械结构形态元知识为M(1,1,T1);基本体形态7、基本体形态10相互独立,根据关联规则得到关联形态M(7∧10,0,E7E10),其中E7E10为点P23到点P31的直线;基本体形态7、基本体形态10满足吸收原则2,因此基本体形态7必须进行变换,变换后的终点P23坐标如表5括号内数据所示,融合后的机械结构形态元知识为M(7,0,T7)和M(7∧10,0,E7E10),其中形态T7为点P22到新点P23的直线,E7E10为新点P23到点P31的直线;基本体形态11、基本体形态12满足吸收原则1,因此融合后机械结构形态元知识为M(11,2,F11),M(12,2,F12);基本体形态11、基本体形态15相交于点P34到点P35的边,满足叠加原则,因此融合后机械结构形态直接累加。同理,两两判断图13的所有基本体形态,逐一提取机械结构形态知识表示的元素,其形态三维模型如图14所示。

支座实例表明,基本体形态知识库主要用于存储知识相关参数,以便形态融合规则的判断和推理。在机械结构形态知识融合算法中调用三维软件的二次开发函数进一步简化融合规则的实现过程。例如,ProToolkit的间隙计算函数Pro_Compute_Clearance()可以方便地判断图元间的相交情况,并提取两个图元间最短距离的点元素。
表6所示为常用机械结构的形态融合实例,进一步验证了本文机械结构形态知识融合算法有利于机械结构形态模型的有机集成。由表6融合前、后的机械结构形态可知,融合后的机械结构形态更加符合设计人员的认知,且便于识别三维模型检索过程中的拓扑关系,以及比较主要几何特征,从而提高三维模型的重用率。

表6 机械结构形态融合实例
5 结束语
机械结构形态是机械结构模型特征简化的表达方法,其知识融合实现了基本体形态的有机融合,基于本体的机械结构形态知识转换体现了机械结构三维模型与机械结构形态的内在关系。本文对基本体转换模型知识、机械结构形态元知识及机械结构形态知识的表示方法进行研究,为机械结构形态元知识融合的包容规则、叠加规则、关联规则合吸收规则的构建提供了理论模型,并以示例说明上述规则的应用条件和结果。实例分析进一步表明机械结构形态知识表示的实用性,以及融合规则在机械结构形态模型构建过程中的可行性。本文的机械结构形态融合除了忽略有关修饰特征外,体现了每一个基本体的形态,后续研究可以继续针对行业特点进一步简化非重要模型特征,为机械原理形态研究提供更加简练的表达模型。
猜你喜欢
作文周刊·小学一年级版(2023年40期)2023-10-18 08:07:57
石材(2022年4期)2022-06-15 08:55:02
小猕猴智力画刊(2022年3期)2022-03-29 01:09:42
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:26:14
新世纪智能(语文备考)(2019年10期)2019-12-18 02:46:14
山东冶金(2019年5期)2019-11-16 09:09:22
制造技术与机床(2019年6期)2019-06-25 10:17:38
表面工程与再制造(2019年1期)2019-05-11 08:51:28
中学生数理化·七年级数学人教版(2018年9期)2018-11-09 01:24:56
Coco薇(2017年11期)2018-01-03 20:59:57
