四绕组永磁直流力矩电机控制系统设计
2020-09-09 04:54
安徽电子信息职业技术学院学报 2020年4期
(苏州工业职业技术学院,江苏 苏州215104)
一、引言
永磁直流力矩电机作为直流电机的一种,是近年来随着永磁技术的迅速发展而发展起来的一种新型直流电机。作为现代工业设备、现代科学技术和军事装备中的重要的机电元件之一,直流力矩电机不但具有直流电机的诸多优点,更具有低转速、大转矩、过载能力强、响应快、特性线性度好、力矩波动小等特点[1-3],可直接驱动负载,因而具有较高的运行精度,被广泛应用于纺织、电线电缆、金属加工、造纸、橡胶、塑料等民用工业,同时在近年来国家大力支持的航空航天,机器人领域也有着广泛应用。由于航空航天要求装置具有高精度,高稳定性和可靠性,需对力矩电机进行相应的三闭环控制系统的设计,以提高各项性能指标,使其满足要求。
本研究所设计的直流力矩电机控制系统,用于航空舵机的测试系统,以测试舵机的运行性能能否满足高精度要求。所谓舵机,即为飞行控制系统的执行机构,它按照飞控计算机的输出指令对飞机的各操纵面进行直接或间接的控制,一般由作动器、控制器等部分组成[4-5]。直流力矩电机采用四绕组结构,主要是基于以下几点考虑:
(一)各绕组相对独立运行,系统容错率高即有个别绕组出现故障时,系统仍能正常工作;
(二)绕组较多,可根据实际要求提供更大的力矩;
(三)多绕组同时工作时,每套绕组电流较单绕组工作时减小,对器件的电流定额要求降低,系统安全性提高。
综上所述,通过仿真模型研究及软硬件的设计,使所设计的直流电机系统运行精度,动态响应达到预期的要求,这样才能很好的发挥自身系统的作用,顺利准确完成对航空舵机的测试。本课题的研究可能对国内多余度而不仅仅是双余度直流电机的研究起到一定的借鉴作用,也可能对调节器的认识进一步加深,不仅可以采取常用的PI调节,也可以采用比例加前馈的调节方式,为今后相关学者研究自动控制调节策略问题提供一定的新思路。
二、直流力矩电机及控制系统的数学模型
直流电机是电机的主要类型之一,以其良好的起动性能和调速性能著称。直流发电机供电质量较好,常常用作励磁电源和某些工业用电源。直流力矩电机作为直流电机的一种,以其转矩波动小,直线特性好,能在堵转条件下长期工作的优点,很好的解决了某些自动控制系统中,被控对象在较低转速下难以保持较高运行精度的问题,比较适合在位置和低速伺服系统中作为执行元件,也适用于在需要调节转矩或一定张力的场合。
(一)直流力矩电机数学模型的建立
利用电路基本规律和牛顿运动定律可得到直流电机的基本方程,包括电压方程、转矩方程、转速方程等。本系统所用四绕组电机,在设计过程中,各绕组间磁路相互独立,因而每两套绕组间的互感约为0。这使得我们可忽略多绕组间复杂的互感效应,这大大简化了电机数学模型和仿真模型的建立过程,在数学模型上,四绕组和单绕组工作两种情况下将保持一致。下面以单绕组为例简述直流力矩电机的数学模型。
1.电压方程
永磁直流电机等效电路如图1所示。

图1 永磁直流电机等效电路图
当电机作电动运行时,由电网向其供电,转化为机械能,由图1可知


2.转矩方程
直流电动机电磁转矩及负载转矩如图2所示,在电动机中,电枢电流与感应电势反向,故当电枢逆时针方向旋转时,N极下导体中的电流流入,S极下则为流出,于是电枢将受到一个逆时针方向的电磁转矩。此时电动机的电磁转矩是一个与转向相同的驱动转矩。

图2 直流电动机电磁转矩及负载转矩示意图

稳态时,输出转矩T2与负载转矩TL相平衡,即T2=TL。
3.功率方程
负载运行时,电枢绕组的感应电动势E和电枢电流Ia的乘积,便是电磁功率Pe,即

考虑到转子角速度Ω满足

得

式中,EIa为电机所吸收的电功率,TeΩ为电磁转矩对负载所做机械功率。由能量守恒知,二者相等。
(二)直流力矩电机的调速理论
电动机使用是以驱动生产机械的为目的的,根据负载的需要,常常希望电动机的转速能在一定或宽广的范围内进行调节,且调节的方法要简单,经济[6-7]。直流电动机在这些方面都有其独到的优点。
因为有

再结合式(2),得到直流电动机的转速公式

式中,U、Ia和Ra分别为电枢电压、电枢电流和电枢回路电阻;为励磁磁通;Ce为取决于电动机结构的电动势常数。
由式(8)可知,调速方法有三种:
(1)电枢控制(调压调速),即调节电枢电压U来调速。这种调速方式能够实现驱动系统转速的大范围平滑调节,且具有较快的响应速度,属恒转矩调节。可实现无级调速,工作效率较高。
(3)改变电枢回路电阻Ra,但只能实现有级调速。
综上,就目前来说,调压调速是比较理想的直流电机调速方式。
三、直流力矩电机闭环控制策略与模型
(一)闭环控制策略
当电机仅有一个绕组工作时,系统控制策略如图3所示。本控制策略采用三闭环控制方式,内环电流环采用PI调节,中间转速环采用PI调节,外环位置环采用“比例加前馈”的调节方式。

图3 直流电机闭环控制策略
(二)直流电机闭环控制系统模型
直流电机通常以电枢电压为输入量,并以电机转速为输出量。在忽略电枢反应、涡流效应和磁滞的影响,并且永磁体励磁恒定的前提下,便得到直流电机运动方程为:

式中Te和TL分别为电机的电磁转矩和负载转矩;J是电力拖动系统整个运动部分折算到电机轴上的转动惯量。
整理得电流与电压以及电动势与电流之间的传递函数分别为:
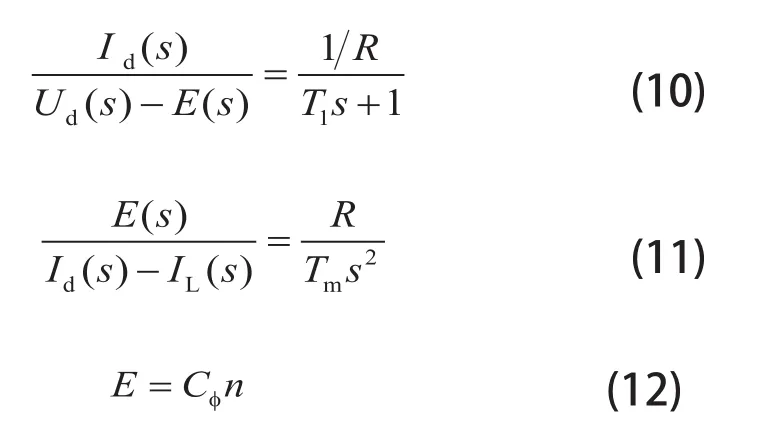
式中T1为电枢回路电磁时间常数(s),T1=L/R;Tm为机电时间常数(s);Ud、 Id和IL分别为电枢电压(V)、电枢电流(A)和负载电流(A);Cф为恒定励磁下的电势系数(V/rpm)。
直流电机系统动态结构如图4所示:
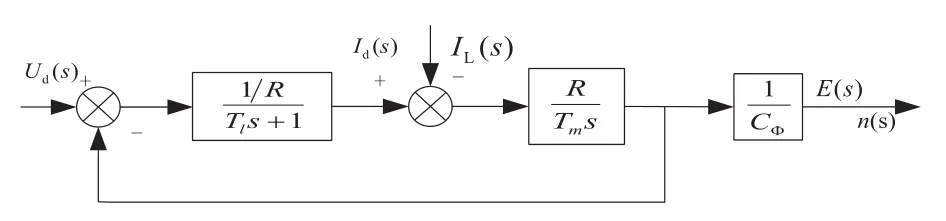
图4 直流电机系统动态结构图
1.电流环模型
为使电流环稳态上无静差,以获得理想的堵转特性,动态上保证电动机电枢电流无超调,保证系统的跟随性,把电流环校正成Ⅰ型系统,应采用PI调节,其传递函数为
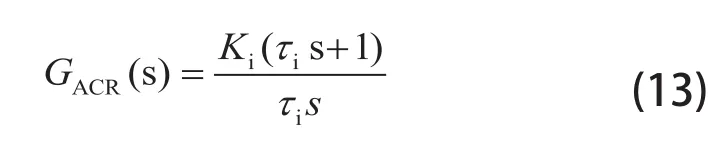
式中,Ki和τi分别是电流调节器的比例放大系数和时间常数。
根据对消原理,为完全对消掉控制系统较大的惯性环节,以使校正后的系统响应速度明显加快,取τi= T1。PI调节器比例放大倍数取决于系统的动态性能指标。根据二阶最佳系统原理,取
前向通道各项相乘并经简化得到近似电流环开环传函为
电流环闭环传函为

在设计电流环时,由于系统电磁时间常数T1远小于机电时间常数Tm,故电流的调节过程远比速度调节快,此时可认为电流环的控制对象是具有双惯性的,并且反电势变化较慢,可认为基本不变,再省略滤波环节,得到电流环近似动态结构如图5所示。图中,Ks, Ts分别是系统整流装置的放大系数和滞后时间常数,β是电流环反馈系数。

图5 电流环动态结构图
2.转速环模型
转速环设计时,可以把已经设计好的电流环简化作为速度环的一个环节,为了实现转速无静差,并提高系统的动态抗扰性能,把转速环设计成典型的Ⅱ型系统,在负载扰动作用点后需加一个积分环节,ASR采用PI调节器,其传递函数为
式中,Kn和τn分别是转速调节器比例放大系数和时间常数。
经化简,等效成单位负反馈系统和小惯性环节,得到转速环的闭环传递函数为
在上述假设成立的前提下,由此得到转速环的动态结构如图6所示。

图6 转速环动态结构图
3.位置环模型
本系统采用“前馈+比例”环节作为位置调节器。其中前馈控制一般采用专用调节器,其主要特点有:
(1)对所测干扰反应快,控制及时[8];
(2)一般只能克服系统所能测量的干扰[9]。
将已整定好的转速环等效为二阶环节,以实现位置无稳态误差。根据以上分析,选取前馈环节传递函数为[10]

可看成是速度前馈和加速度前馈两部分。这样,当输入位置给定θ*为恒定,或速度信号时,主要由速度前馈K1s起作用;当位置给定θ*为加速度,正弦或高阶信号时,主要由加速度前馈K2s2起作用,减缓给定信号的上升速度。因而,所选取的前馈环节传递函数可很好的实现对多种给定信号的较好补偿。于是得到位置环的动态结构如图7所示。
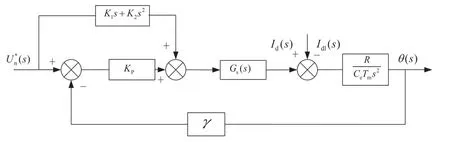
图7 位置环闭环结构图
综合以上对三个调节器的设计,得到三闭环控制系统动态结构如图8所示,图中Cr是电势反馈系数。
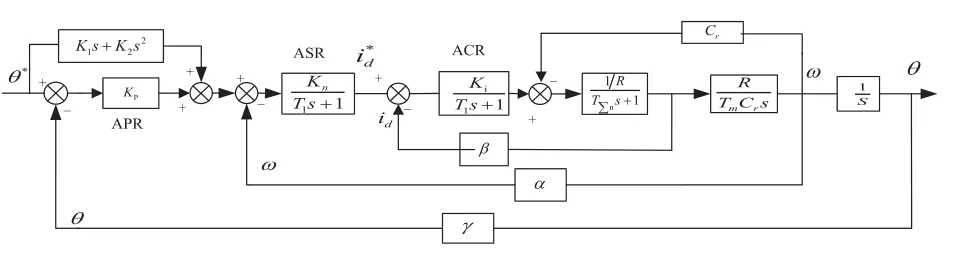
图8 系统总体动态结构图
四、直流力矩电机控制系统仿真与实验
(一)直流力矩电机控制系统仿真
系统仿真参数如下所示:
直流电压源输出为30V,四绕组直流永磁电机参数为电枢回路电阻Ra= 2.65Ω,回路电感La=0.01324H,转动惯量J=0.003kgm2,反电势常量Ce为0.121V/rpm。由于simulink模块库中所提供的直流电机模型中输出不含转子位置,因而将输出转速(单位rad/s)经一级初始条件为0的积分环节,得到实际转子转角,与给定转子位置比较,结果送速度调节器。
转速环采用PI调节,经整定在KP=0.15,KI=0.3时,系统动态响应较好。此次采用阶跃信号作为给定,阶跃时间为0.02s,终值为100r/min,仿真波形见图9。

图9 转速环阶跃给定响应波形
由图9波形可知,系统跟踪性能较好,实际转速信号能很好的跟踪给定信号,在0.02s阶跃后,实际转速能很快跟随,在不超过0.01s内达到稳态,超调量很小,在允许范围内并且稳态误差很小,不超过1rpm/min。
当恒转速突加负载时转矩的速度,转矩响应波形如图10所示。恒定转速为20rpm/min。在0.08s时,将负载转矩由3Nm变为6Nm。

图10 突加负载时转速与转矩响应波形
由上两图可知,当转矩突然加倍时,转速立刻下降至约16 rpm/min,经过0.02s重新恢复稳态转速20 rpm/min,产生转速波动,系统响应迅速,恢复时间较短。
(二)直流力矩电机控制系统实验验证
系统控制电路以DSP芯片TMS320F2812为核心,主要包括直流力矩电机、功率电路、控制电路、传感器、上位机、示波器以及电流钳等测量设备。通过对直流电机的电压电流信号采样,算法实现等功能,完成对功率开关器件通断的控制,从而间接控制电机的运行,完成调压调速。实验参数与仿真参数一致。硬件平台实物如图11所示。

图11 硬件实物图
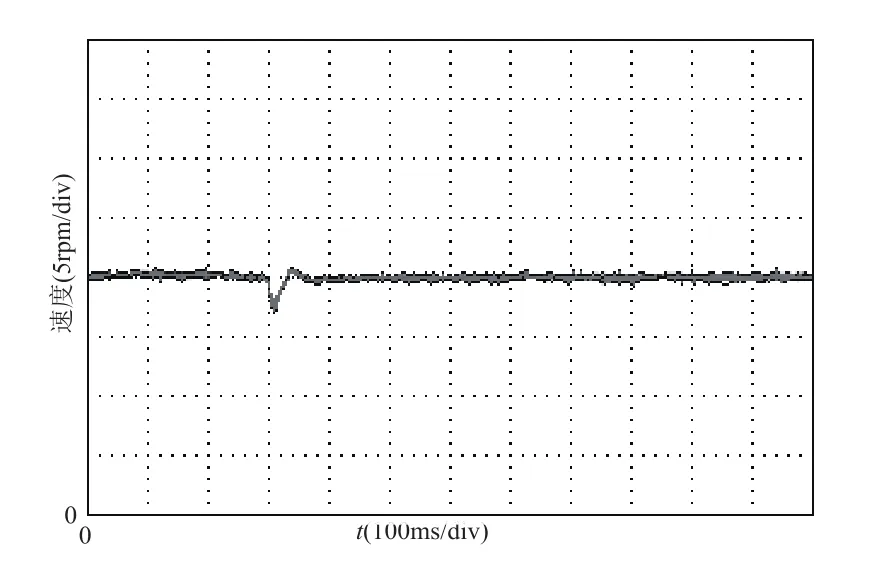
图12 突加负载时转速响应波形
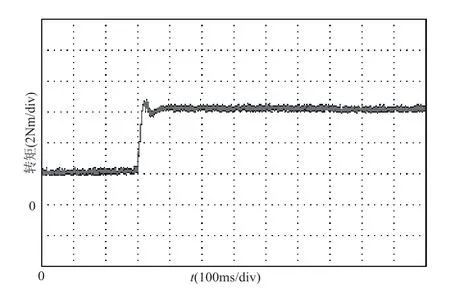
图13 突加负载时转矩响应波形
突加负载时转速响应波形如图12所示。由图12可以看出:转速以20rpm/min恒转速运行,在0.3s时刻,负载转矩由2Nm突变为6Nm,转矩波形如图13所示,在经过0.03s左右电机恢复稳态运行,电机运行平稳。
五、结语
永磁直流力矩电机是机电一体化的一种高新技术产品,它有重量轻、效率高、惯量小和控制精度高等优点,广泛应用于伺服控制系统,如本文涉及的航天舵机。而且根据航天舵机的用途特点,采用四绕组独立工作,提高了系统工作的可靠性,并且位置环采用比例加前馈的调节方式,一定程度上克服了传统PI调节的缺陷,提高了系统的精度,加快了动态响应。本文以改善四绕组永磁直流力矩电机运行性能为目的,设计了其驱动控制系统。该系统不仅建立了直流力矩电机数学模型,并对其电流转速位置三闭环控制系统进行建模仿真,而且完成了永磁直流力矩电机控制系统的硬件电路设计,同时在硬件平台上完成了系统的相关实验,并对响应曲线加以分析,验证了设计方案的可行性。
猜你喜欢
大电机技术(2022年5期)2022-11-17
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
防爆电机(2020年4期)2020-12-14
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24