
基于单片机的淤泥质海岸垃圾清理船控制系统设计
2020-09-08 04:04:44王稳张建伟马燕飞张雷林金阳路万鹏
机械工程师 2020年8期
王稳, 张建伟, 马燕飞, 张雷, 林金阳, 路万鹏
(浙江海洋大学 港航与交通运输工程学院,浙江 舟山316022)
关键字:泥质海岸;清理船;智能化;单片机
0 引 言
我国淤泥质海岸滩涂总面积超过217 万公顷,其主要位于辽宁、山东、台湾、海南及江浙一带等海滨地带。此区域内适合养殖和旅游等产业的发展,但由于垃圾的污染问题,使得目前大面积的淤泥海岸无法得到有效利用。在浙江省内,如舟山、宁波等旅游城市,海岸垃圾更是成为影响市容市貌的原因之一;此外,浙江省内海漂垃圾污染情况最严重的地区为宁波象山县石浦皇城,2015年该地区每平方公里岸滩上分布有329 000余个垃圾。另外,海岸垃圾由于潮汐作用会进入海洋,而海洋垃圾污染问题正成为各国政府广泛关注的环保问题之一,海洋垃圾不仅对海洋生态造成了破坏,而且白色垃圾所产生的有害物质,如塑料颗粒已经在各类海洋动物体内被检测出来,这已危及人类自身。因此,目前解决海岸垃圾污染问题是必要的,这不仅仅是为了保护生态环境,更是为人类的可持续发展奠定基础。本文主要根据现有淤泥质海岸垃圾清理船结构设计的控制部分进行探究[1-2],提出了基于单片机的淤泥质海岸垃圾清理船控制系统设计,以完善装置设计,实现清理船工作的智能化。
1 淤泥质海岸垃圾清理船
2016-2018年《中国海洋环境状况公报》的相关统计数据如表1所示,可以看出:我国海滩垃圾平均个数在2017年有明显降低,2018年又略有升高,海滩垃圾平均密度逐年降低,但塑料类垃圾占比逐年升高,由此可以看出,目前我国针对海岸垃圾处理的效果并不显著[3-5]。海岸垃圾随潮汐进入海洋,又会对海洋生态环境造成破坏,污染极大。
本文所设计的控制系统是在淤泥质海岸垃圾清理船的基础上实现的,船体结构如图1所示。清理船由船头、船尾、船身组成,其中垃圾收集机构由耙钉型传送带和垃圾扫板组成;垃圾输送机构由输送传送带实现;垃圾淤泥分离机构由搅拌杆、储水舱、喷头和输送泵组成;垃圾取出机构由垃圾储存框、螺杆和限位板组成,以上4种机构构成了淤泥质海岸垃圾清理船的主体结构[1-2]。
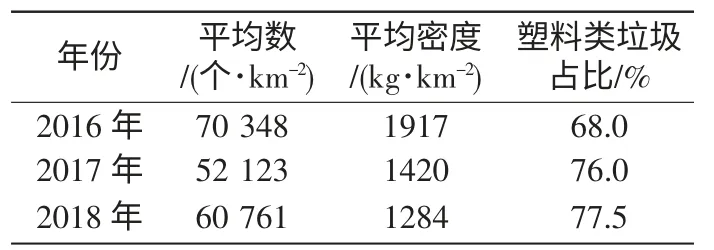
表1 2016-2018年中国海滩垃圾污染状况
2 设计方案
本文所设计的系统可实现智能巡航模式、自主巡航模式、遥控模式、自动返航。智能巡航模式适用于作业区域内垃圾分布零散、数量少的情况,通过垃圾定位系统,待清理船运动至垃圾前方时启动垃圾收集机构及垃圾淤泥分离机构,清理完毕后停止机构运行,以降低能耗,提高清理船续航能力。自主巡航模式适用于作业区域内垃圾分布密集、数量多的情况,垃圾收集及垃圾淤泥分离机构持续运行,在清理船巡航的过程中将沿途垃圾进行清理,有效提高清理船的垃圾清理效率。遥控模式适用于清理船自动控制失效的情况,在清理船出现系统故障,或装置本身发生故障时,可通过遥控模式实现清理船的手动返航。自动返航工功能,根据垃圾储存框下安装的质量传感器实时传输的数据,能够实现清理船垃圾存储量达到上限时的自动返航。控制系统结构如图2所示。

图1 清理船三维图
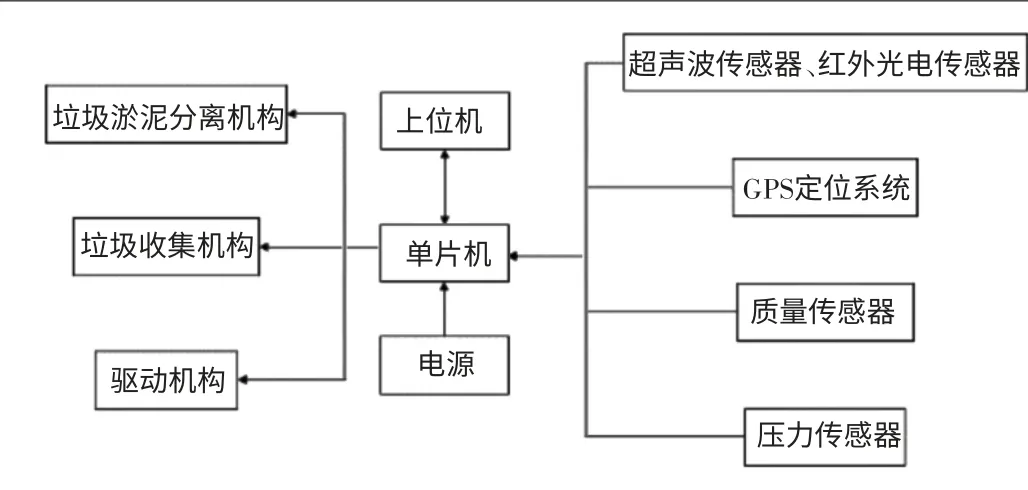
图2 控制系统结构图
3 清理船控制系统设计
3.1 主控系统
为实现清理船上述功能,本设计采用Arduino Uno R3作为主控单片机,该单片机由欧洲科研人员开发,以ATmenga 328p AU为内核,时钟频率为16 MHz,Flash内存32 kB,数字引脚口0~13,模拟引脚口A0~A5,默认输入信号0~5 V。单片机工作电压为5 V,最大电流40 mA,可用USB供电或用外接7~12 V的直流电源供电。单片机的使用需下载Arduino IDE软件安装于电脑,软件安装后双击点开,进行开发环境配置,插入开发板后,系统USB驱动自动安装,在工具栏中选择对应端口,再在文件栏中选择示例,点击Blink程序后即可进行程序编写,操作界面中的对号表示启动编译,箭头表示将程序上传至单片机。
3.2 清理船智能巡航及自主巡航模式
由于不同工作环境下海岸垃圾的分布不同,考虑到降低清理船能耗的问题,在海岸垃圾密度小时,清理船以智能巡航模式工作,系统设计如图3所示;在海岸垃圾密度大时,清理船采用自主巡航模式工作。智能巡航模式下,垃圾定位系统不断检测清理船正前方是否存在垃圾,若存在垃圾,则单片机控制垃圾收集机构动作,当垃圾收集完毕后,垃圾收集机构停止工作,清理船继续巡航;自主巡航模式下,垃圾收集机构持续动作收集垃圾,单片机控制垃圾定位系统停止工作。

图3 垃圾定位系统图
在垃圾定位系统传感器的选择上,常用的传感器有红外光电传感器、超声波传感器和激光传感器等。由于激光传感器造价昂贵,又考虑到本设计对障碍物测距精度要求不高,因此不选用此种传感器;超声波传感器实用性强,但由于超声波束角度过大,因此只能得到简单的与障碍物之间的距离;红外光电传感器只能判断障碍物是否存在,不能确定与障碍物的距离信息。从以上分析可以看出,激光传感器并不适用,而超声波传感器和红外光电传感器各具优缺点,因此本设计考虑同时使用超声波传感器和红外光电传感器,辅以多传感器信息融合技术,实现垃圾的定位。GPS系统可提前对海岸进行路径规划,以实现清理船在一定区域内的巡航。垃圾定位传感器参数如表2所示。

表2 超声波模块、红外模块参数表
3.3 清理船遥控模式
本文所设计的清理船控制系统中的遥控模式,主要是为了防止清理船自动系统失控后船体难以回收问题的发生。当清理船工作过程中发生自动控制失效或难以自主返航时,清理船的遥控模式可通过上位机遥控清理船返航。由于系统设计中上位机只需满足遥控返航的功能,因此,为降低上位机的开发成本,本设计中选择使用Arduino Uno R3单片机为控制中心及相应的物联网WIFI模块,从而可使用此系列单片机现有的人机交互平台,即手机微信公众号进入亚博智能科技,进行简单的WIFI配置即可通过手机实现清理船的返航操控。其中,蓝牙模块输入电压为3.6~6.0 V,默认波特率为9600,信号有效传输距离10 m,因此,遥控模块中需加配功率放大器。
微信公众号配网步骤:1)WIFI模块供电;2) 在WIFI模块上,长按G按键,直至蓝色的指示灯亮后松手;3)微信扫描相应二维码,点击“配置设备上网”;4)输入当前无线网络密码并连接;5)进行设备的搜索扫描,点击界面中搜索到的“Arduino套件物联网控制”;6)点击“绑定设备”,即完成配网。
4 垃圾收集机构分析
为了保证清理船的垃圾收集机构在反复工作状态下不会发生强度失效,本文对垃圾收集机构的关键部件进行应力及位移分析,以证明清理船设计的合理性,同时也为后期成品的制作提供理论依据。考虑到淤泥海岸垃圾种类、数量及粘连淤泥等情况,设计耙钉型传送带,垃圾扫板主体采用钢材。在有限元分析中,夹具作用面为传送带侧面和垃圾扫板两轴端,对其垃圾运输面和垃圾扫板的板面施加载荷,获得应力分析图和位移分析图,如图4~图7所示。从图中数据可以看出,传送带垃圾运输面承受的最大应力远远低于屈服力,且位移距离极小。
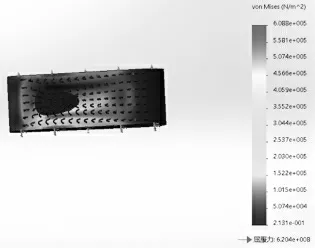
图4 传送带应力分析图
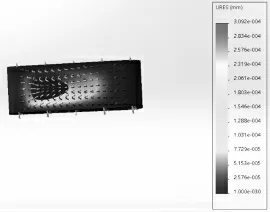
图5 传送带位移分析图
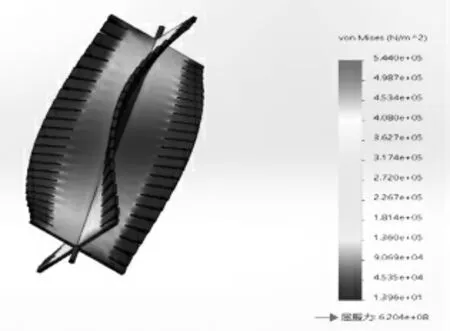
图6 垃圾扫板应力分析图
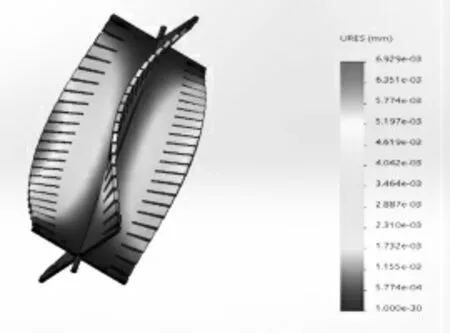
图7 垃圾扫板位移分析图
5 结 语
本文中的清理船使用转轮作为驱动装置,使用双直流电动机为转轮提供动力。直流电动机带动轴系转动,以驱动转轮运动,通过控制电动机的正反转实现清理船的转向。垃圾扫板及耙钉型传送带同样采用直流电动机驱动。垃圾定位系统选用超声波传感器及红外光电传感器,通过多传感器信息融合技术对垃圾进行精确定位。GPS系统可提前对海岸进行路径规划,以实现装置在限定区域内的巡航。质量传感器安装于垃圾储存框下,当收集到的垃圾达到设定值时,信号输入控制中心,由单片机发出指令,控制清理船返航。同时,为防止清理船失控现象的出现,设计中增加遥控模式,采用物联网WIFI模块,以实现远距离控制。
淤泥质海岸清理船主要用于淤泥质海岸的垃圾清理,也可执行内陆河道、湖泊水域的水面垃圾打捞收集工作,具有较强的可移植性。本文主要完善了淤泥质海岸垃圾清理船设计,提出了基于单片机的淤泥质海岸垃圾清理船控制系统设计。清理船设计的实现可有效解决海岸垃圾的污染问题,能有效促进相关海岸旅游产业和水产养殖业的发展。另外,海岸垃圾污染的治理也间接保护了海洋生物的生存环境。本文所完善的清理船设计的实施,可改善人工打捞的劳动强度,避免不明垃圾对打捞人员造成的伤害,保护打捞人员安全。
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
文萃报·周五版(2022年24期)2022-06-21 20:55:40
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
河北工程大学学报(自然科学版)(2015年3期)2015-02-27 13:46:30
水利水电科技进展(2014年1期)2014-10-17 02:29:14
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:29
环球时报(2012-03-28)2012-03-28 14:31:30
