
雷达海上目标特性综述
2020-09-05 14:35关键
雷达学报 2020年4期
关 键
(海军航空大学信息融合研究所 烟台 264001)
1 引言
海洋空间广阔、资源丰富,是备受关注的战略方向。持续透彻的海洋监视是海洋大国的基本支撑。海上目标种类繁多、分布范围广,重要航路上目标密集,商船、民船和军用船只混杂,环境变化莫测,难以识别区分,探测难度大。海上作战和非战争军事行动、海上执法和维权等都对海上目标探测有迫切需求。海上目标特性是实现有效探测的重要支撑。
海上最典型的目标就是舰船。舰船类型和层级多,单体结构复杂,相互间差异大,使得目标特性动态范围很大,且海上目标与环境相互耦合作用强,目标特性呈现很强的时变性。舰船特性除了其固有的几何特征和力学特性外,还有物理场,如声场、光场、磁场、电场、水压场、热场、重力场等[1]。对于海面目标探测,雷达是主要手段。雷达目标特性主要包括雷达散射截面(Radar Cross Section, RCS)[2],以及后向散射系数、近场电磁散射特性、宽带特性、目标噪声、极化散射矩阵等。RCS随姿态角变化而起伏,因此回波信号幅度是起伏的。20世纪50年代,Marcum[3]和Swerling[4]建立了5种起伏统计模型,后来扩展为具有更高自由度的 χ2模型,还有Rice模型和Log-Normal模型[5]。
RCS是最常用的雷达目标特性。关于RCS测量与预估有大量研究成果[5,6]。试验测量是获取RCS特性的重要手段。但是,RCS测量存在技术难度大、成本高、边界条件特性难以验证等问题,尤其对于大型舰船更是难以测量。随着计算机技术发展,电磁计算成为研究目标特性的一种很好手段,相对于试验测量具有便于重复、能验证极限特性的优势。但是,电磁计算仍然受算力和精度的限制,因此测量与计算两者是相互补充、相互支撑的。
目标特性除了取决目标自身,还与目标所处环境和观测所用的传感器有关。因此,本文从目标、环境、传感器3个方面分别讨论一些与海上目标特性有关的内容。
2 海上目标与环境
海上目标来自四面八方。“海上目标”不局限于海面目标,按区域可分为水面目标、水下目标、空中目标(海面上空,甚至临近空间)、近岸目标(陆海交界附近区域的目标)。本文主要针对海面目标和与此关联紧密的目标进行讨论。
2.1 海上目标
海面目标除了数量最多的水面舰船,还有潜艇的潜望镜、通气管和天线、假目标(角反射体等)、水雷、浮标、钻井平台、海产养殖场、浮冰等等。舰船包括军船、商船、民船。军用舰船包括航空母舰、驱逐舰、护卫舰、潜艇、两栖作战舰艇、作战支援舰艇等。围绕水面舰艇作战,还有飞机、导弹、无人平台(无人机、无人艇、无人潜航器),甚至鸟[7](会影响舰载机起降安全)也是关注的目标。对于不同的应用,关注的目标类型不同。
海上目标RCS动态范围大,从零点几平方米到百万平方米(见图1)。大型舰船属于超电大尺寸。例如,排水量10000 t的大型驱逐舰的RCS可达105m2。但是随着舰船隐身技术发展,先进舰艇采用了吸波材料、内倾外形、综合集成桅杆和集成上层建筑等技术,RCS大大减小,其RCS可降为常规船型的1/10[8]。电磁超材料的发展将使目标特性发生颠覆性变化[9]。现代军用舰船RCS并不能完全反映目标的真实特性。
海上目标结构复杂。大型舰船属于超结构复杂目标。舰船上搭载的无线电辐射源多,军用舰船还有干扰设备,对实战条件下的目标特性影响大。水面舰艇不仅个体复杂,而且常以编队形式出现,编队内目标间有很强关联性(如航向、航速和相对位置),并且在动态变化。将舰艇编队作为一个目标,还是将一艘船作为一个目标,呈现不同的目标特性。在编队目标中,编队的形状结构和个体数量也是目标特性,在反舰导弹目标选择中有用。有些大型舰船还呈现复合目标特性,如携带有舰载机、小艇、导弹等,而且是动态变化的,因此这些附属物的特性也是海上目标特性的组成部分。
随着雷达的空间和多普勒分辨率的提高,可以获得复杂结构的精细特性。宽带雷达可以获得一维距离像,如图2所示舰船的强散射点沿距离的分布,是重要的目标特性,随舰船姿态变化很大。SAR可以获得距离-方位两维高分辨率像(见图3),呈现出直观的几何形状特征,而且强散射点的空间分布仍然是其重要目标特性,这种分布是两维的,相对于一维包含了更多的目标特征。相位测距技术可使距离测量精度达到半个波长,能够获得目标精细的动力特性(如颤动等)[10]。

图 1 不同雷达频率下测得的一艘大型海军辅助舰水平极化RCS[5](径向标度,以1 m2的分贝数为单位)Fig. 1 RCS of a huge naval supplementary ship in horizontal polarization for different frequency[5](unit of radial scale is dB of 1 m2)
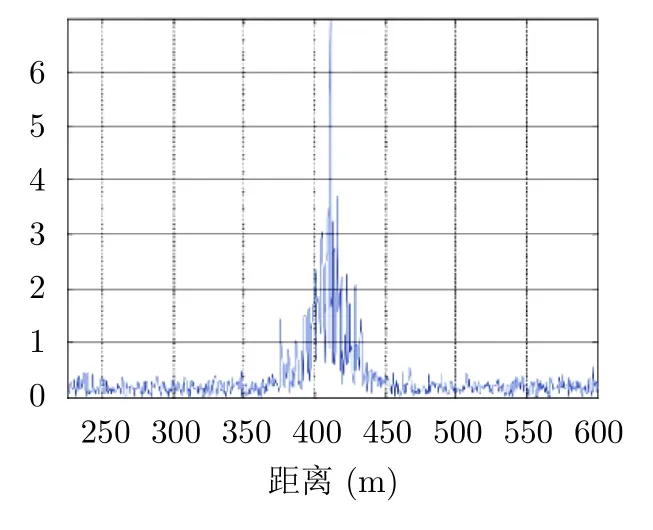
图 2 舰船一维距离像Fig. 2 One-dimensional range profile of a ship

图 3 舰船SAR图像Fig. 3 SAR image of a ship
高多普勒分辨率可感知精细运动特性,如微动特性[11,12]。一般将目标或部件除平动以外的振动、转动和加速等微小运动都归为微动。舰船与海面相互作用使其具有多自由度的运动,而且舰船能够产生微动的零部件多,如导航雷达天线的旋转、舰面设备的运动等,这些都使舰船具有丰富的微动特性,这些微动在频域上具有时变特性,是综合了目标结构特性、散射特性、运动特性于一体的精细特性,是做目标精细识别的很好手段。
海上目标活动范围大、航迹特征丰富,时间空间跨度大,呈现大数据特点,一些特性隐含在大数据中,可挖掘其活动规律,递进演化出目标意图和威胁等级等目标特性,形成海战场态势。
2.2 海上环境
对雷达探测海上目标影响大的是海面回波,称为海杂波。海面由大尺度重力波和小尺度张力波构成,是一种复杂动态变化的环境,与地理位置、季节、大气状况密切相关,可由海况、浪向、温度、盐度等描述(见图4)。模型包括海谱模型、后向散射系数模型、幅度统计模型、多普勒谱模型等[13,14]。
海谱是海面的功率密度谱,反映了海浪能量在波长和传播方向上的统计分布,是海面高度起伏相关函数的傅里叶变换,是描述海面的最基本方法之一。根据海浪的成长状态分为稳态海谱和非稳态海谱。通常假设海浪充分成长,风恒速吹过一段时间达到稳态形成稳态海谱。常用的海谱模型有PM,JONSWAP, DV, Apel, NRL模型等。
后向散射系数模型是后向散射系数随海况、波段、极化、掠射角、风向角变化的半经验模型。主要有SIT, GIT, TSC和HYB模型,可用于雷达海杂波的粗粒度仿真,反映了杂波的反射能力。在现代雷达信号处理中更需要幅度统计分布特性。对于低分辨率雷达,海杂波可用瑞利分布描述,随着雷达分辨率提高,或掠射角较小时,杂波幅度概率密度函数出现长拖尾,偏离瑞利分布,可由韦布尔分布、对数-正态分布、复合K分布等描述。
多普勒谱表征了海杂波在各频带上能量分布,反映了海面自身的动态调制特性。频移和展宽是多普勒谱的两个主要特征。频移是海浪与雷达间的相对水平运动产生的。展宽是海面上下振动造成的。入射波与相应波数的波浪发生谐振从而产生各阶多普勒峰值[15]。
国内外已开展了大量的雷达海杂波测量试验和研究[16,17]。海杂波特性与雷达波段、带宽、分辨率、极化、掠射角等有关。当高分辨率雷达以低掠射角照射粗糙海面,或高海况时海浪出现浪花,产生破碎浪,在雷达回波上呈现为强散射点的海尖峰,在PDF曲线上表现为长拖尾,会导致虚警率增加。海尖峰可以从幅度、持续时间、间隔上进行鉴别[18]。低掠射角时,海杂波在VV极化强于HH极化,这种差别随波长增加而变得更为明显,随海况增加而减小[19]。
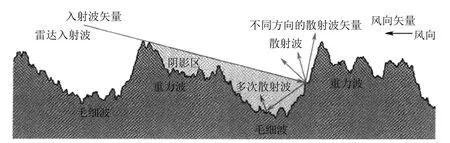
图 4 粗糙海面电磁散射示意图[14]Fig. 4 Sketch map of electromagnetic scattering from rough sea surface[14]
电磁波在近海面传输时会在蒸发波导条件下形成异常传输现象,可以用于超视距探测[20]。此外,海面浮油对舰船探测也有影响,可能会削弱海杂波对目标的影响[21]。
2.3 海上目标与环境耦合
舰船与海面间相互动力学作用,使舰船具有六自由度运动(纵荡、横荡、纵摇、横摇、升沉、偏航,见图5),运动幅度和周期与吨位、航速、海情和风向等有关。由于海面随机性和舰船结构复杂性,使舰船与海面间的电磁耦合十分复杂,影响舰船目标特性。国际上从上世纪五十年代就开始研究粗糙面的散射问题,后来又陆续开展海面舰船电磁散射计算的研究,分析了海况、掠射角、极化对RCS的影响。国内也有很多学者针对粗糙海面舰船目标耦合散射计算开展了大量研究[22–26]。文献[14]将时变海面、六自由度运动的海面舰船、电磁散射计算结合起来,研究了海面散射耦合以及舰船水动力学运动特性对舰船目标特性的影响。时变海面引起的舰船姿态变化会使舰船RCS变化;海面的多径散射也影响目标特性(见图6),在中低掠射角时,HH极化海面反射系数一般大于VV极化,因此多径效应在HH极化下比VV极化下影响更大;随掠射角增加,多径造成的RCS起伏变得明显[14]。
不仅环境会影响目标特性,目标也会对环境产生扰动。这种扰动也可以被认为是目标特性,成为探测目标的途径,如利用尾流探测飞机[27],类似的舰船尾迹[28,29]、内波[30,31]等可以用于探测水面舰艇和水下目标非声探测。目标对环境扰动在探测小型快艇时可能有用。虽然小艇本身RCS较小,但是发动机掀起的浪花在雷达显示器上很明显。
3 雷达与海上目标探测
3.1 目标探测手段
海上目标种类繁多,环境复杂多变,传感器也是多种多样。单一平台和单一波段的探测能力有限,因此海上目标探测体系向多平台、多波段的多传感器组网的陆海空天一体化发展。在跨域、网络化、一体化联合作战理念驱使下,协同探测的多种手段使得目标特性呈现多维度,并且各平台可在协同作战能力(Cooperative Engagement Capability,CEC)支持下通过作战云共享这种多维度目标特性。
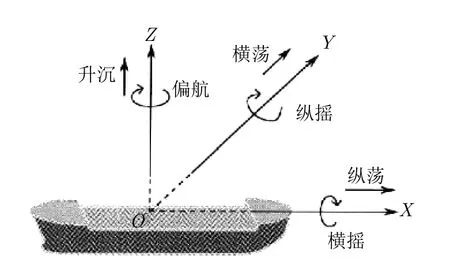
图 5 舰船六自由度示意图[14]Fig. 5 Sketch map of a ship in 6 free degrees[14]
(1) 多平台:对海上目标探测的传感器平台覆盖了舰基、岸基、空基、天基、弹载、水下、无人平台等。目标特性与传感器平台密切相关,一个目标在不同平台传感器观测的特性是不同的,首先视角就大不相同,观测时相也可能不同,相应的目标特性差异很大。由于海域空间广,海上目标稀疏,空基[32]和天基[33,34]是海上目标探测的重要发展方向。
(2) 多波段:多种平台传感器对应多种波段。机载雷达,早期的E-2A的APS/96雷达为S波段,而E-2C和E-2D的雷达则采用UHF波段,P8-A的搜潜雷达工作于X波段。舰载雷达,宙斯盾防空系统的AN/SPY-1雷达为S波段,DDG-1000的双波段雷达(Dual Band Radar, DBR)集成了S和X波段。岸基对海警戒雷达波段有X, C, S波段,以及更低的米波[35],甚至高频段以实现地波或天波超视距探测[36]。由图7可见,同一舰船在不同波段的RCS有所变化,在天顶角较小时海面散射影响很大[5]。
(3) 多分辨:目标特性随分辨率变化很大。不同分辨率在检测与识别中各有用处,高分辨率对识别更有益。在高空间分辨率时,目标几何特征较为明显,视觉显著性也是可以利用的目标特性[37]。在高多普勒分辨率时,回波信号中隐含了目标的运动特性[38]。
(4) 多极化:极化拓展了观测的维度,包含目标和环境特性[39],也影响空间和时间相关性等。极化与高分辨相结合更加细化了目标特性,是雷达目标识别和抗干扰的重要手段[40,41]。
(5) 多体制:海上目标探测场景多样,相应的雷达体制也多种多样。如识别潜望镜等小目标需要高分辨率成像,抑制海杂波可用快速扫描天线,舰载雷达兼顾对空对海采用多功能相控阵。还有新的雷达体制,如量子雷达[42]、微波光子雷达[43]、太赫兹雷达[44]、基于电磁涡旋的雷达[45]。目标特性在不同体制雷达中变化很大。

图 6 海面目标多径反射示意图[14]Fig. 6 Sketch map of multipath reflection of target and sea surface[14]
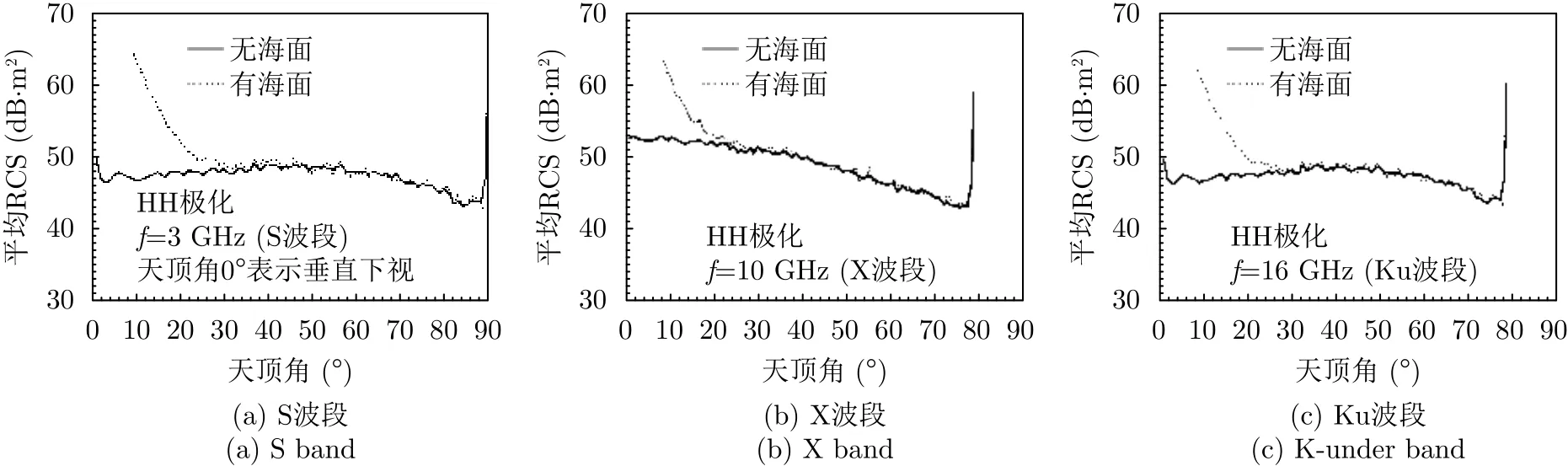
图 7 典型驱逐舰沿±45°方位角平均的HH极化RCS随天顶角的变化曲线[5]Fig. 7 RCS curves of a typical destroyer in ±45° horizontal degrees and HH polarization, horizontal ordinate is complementary angle of pitching angle[5]
3.2 典型应用背景
海上作战是海上目标探测的典型应用背景。海上作战体系主要包括防空作战、反潜作战、水雷与反水雷战、两栖作战等。下面从较为关注的几个方面讨论海上目标特性需求。
(1) 海面目标探测:现代战争方式主要是从敌方防御火力圈外进行非接触超视距精确打击,需要在广域空间内保持动态实时连续的侦察监视预警,单靠舰艇平台上探测设备是不够的,空基(预警机、警戒直升机、浮空器)和天基是很好手段。机载探潜就是一个重要应用。潜艇等水下目标隐蔽性强,潜望镜暴露时间非常短,只有十几秒,对其探测是难题。探潜是由固定翼反潜巡逻机、反潜直升机、水面舰艇和潜艇等多种平台和装备构成的立体化作战体系,要对几十甚至数百平方海里范围内进行快速搜索。反潜机雷达探测潜望镜[46,47]、通气管,甚至需要宽带成像以支持识别。在海面目标探测中,导航雷达探测小目标也是一个典型问题。导航雷达是大多数水面舰艇都配备的装备,使用率最高,虽然作用距离不远,也常担负一定的海面搜索任务,除了避碰外,还要求能探测附近的小目标,如小船、浮标、浮冰等。
(2) 反舰与防空反导:反舰导弹是打击水面舰艇的主要手段,典型目标是大型水面舰艇,如航母、驱逐舰、濒海战斗舰等。目标特性对于反舰导弹在自导段尤为重要。舰船RCS和机动性对反舰导弹的捕捉概率有很大影响,而且还与探测距离、目标航速以及目标航向与导弹攻击夹角有关[48]。此外,角闪烁对末制导雷达测角误差有很大影响。在编队条件下,队形也是重要目标特性。在近海作战时,海岸和近岸区域密集的舰船也会严重影响末制导雷达对目标的选择。导弹需要根据目标和环境特性做航路规划,攻击方向和视角变化很大,需要目标与环境详细的特性信息。此外,大入掠射角攻击时的海杂波以及干扰都是大问题。与反舰对应的是防空反导,典型目标是飞机、导弹。导弹主要是反舰导弹和反辐射导弹,呈现高速、隐身、机动、掠海飞行、俯冲攻击等特点,作战空域从掠海、中低空延伸到高空,甚至临近空间。掠海飞行的反舰导弹,由于飞行高度很低,多径效应影响严重,使得低角跟踪误差增加。在反导中常使用无源干扰手段,如箔条、角反射体等,这些手段的有效布放需要掌握箔条和角反射体的目标特性[49,50],这些干扰手段要与防空武器配合才能很好发挥作用[51]。
(3) 近岸目标探测:濒海区域是近年来备受关注的区域。一种情况是对己方沿海区域警戒,另一种是对敌方近岸区域的目标探测。典型目标有水面舰艇、潜艇、水雷、小船。特点是目标密集、数量众多,陆地和海交织,使背景更为复杂。
除上述应用背景外,还有水雷战与反水雷战,不仅要发现水雷,还要及时发现航渡中的布雷舰艇和飞机。两栖作战覆盖水面、空中、水下,既有平面作战,也有垂直作战方式,目标类型多,有两栖攻击舰、登陆艇、飞机、两栖战车和陆战队员等。海上作战还可能是上述多种情况的交织,目标特性需求也变得非常复杂。
4 目标特性技术
4.1 目标特性数据获取
目标特性数据可以由测量和建模计算获得。测量技术包括紧缩场测量、近场扫描测量、全尺寸静态测量等。欧美发达国家的军方、工业部门、高校建立了多个测试场,如美国陆军ERADS紧缩场、空军RATSCAT测试场、海军大西洋测试场、波音公司、雷声公司、洛.马公司测试场[52]。测量技术难点包括目标姿态控制、测量系统校准和定标、背景影响消除、测量数据处理、宽波段测量、大型目标测量、非合作目标测量、动态测量[53]等。
建模计算相对于测量具有低成本易重复的优势,对于难以获取的目标特性较为适合。方法分为高频近似方法和全波数值方法。数值法计算精度较高,典型方法有限元法(Finite Element Method,FEM)、矩量法(Method of Moments, MoM)、时域有限差分(Finite-Difference Time-Domain,FDTD)等,对于电大目标较为耗时。高频渐近法简单高效,但精度有限,包括几何光学(Geometrical Optics, GO)、物理光学法(Physical Optics,PO)、一致绕射理论(Uniform Theory of Diffraction, UTD)、几何绕射理论(Geometrical Theory of Diffraction, GTD)、物理绕射理论(Physical Theory of Diffraction, PTD)等。典型的计算软件有XPATCH, FEKO, HFSS, CST等。海上目标电磁计算的难点包括超电大目标、复合材料、弹目交会、目标与海面复合电磁散射计算等等[54,55]。
4.2 目标特性的多维描述
将目标测量或计算得到的数据转化为目标特性模型是目标特性应用的基础。如何从几何模型向电磁计算模型、参数化模型、检测识别模型转化,这是目标在不同表示空间之间的映射问题,是目标特性向目标探测应用转化中值得研究的问题。这种模型如何表示,或者用参数化的公式、或者用结构化的数据、或者用网络化的智能学习结构。目标特征不仅在强度上,空间结构是重要特征,这种特征用图论的方法表征可能也是一个途径。
目标特性由多方面因素决定,是多维度的,包括目标维度、环境维度、传感器维度。在高维度空间中,目标特性更明显。目标维度包括类型、几何尺寸、材质、动力、运动、武器、人员等。环境维度包括地理位置、温度、湿度、风场、浪高、浪向、盐度等。传感器维度包括平台、体制、波段、极化、分辨率、视角等。在多域作战条件下,随目标探测进程,观测手段和环境在变化,目标特性随时间空间变化,目标在多个域中穿梭,目标特性也在多维空间中运动,目标探测与识别在相应空间中进行。
4.3 目标特性与目标探测
(1)目标特性与信号处理:目标特性是雷达目标检测识别等精细化处理的基础。设计检测器主要是设计一个检测统计量,使之在有无目标时有尽可能大的差别。经典的检测主要用幅度特性、相关性等(如利用起伏特征的帧间积累抑制杂波),还有一些非线性特性(如分形[56]等),以及通过一些变换提取目标的某些特性(如分数阶傅里叶变换(FRactional Fourier Transform, FRFT), Hilbert-Huang变换等)。近年来,研究热度很高的人工智能算法可以提取高维非线性特征。这种特征隐含了时间空间上的高维关联特性,不像经典的幅度特征和二阶相关那样有便于直观理解的物理意义。
(2) 检测识别一体化:尽管幅度和相关性的维度低,隐含的信息不全面,但是便于测量,具有直观的物理意义,因此还有必要挖掘。构造基于幅度的目标特性子空间模型,在匹配子空间检测中[57],检测器采用多通道形式处理,在检测的同时完成了对目标的分类,如果目标特性模型足够准确,可以实现检测识别一体化[58]。
5 结束语
海上空间广阔且环境复杂多变,海上目标种类多且探测手段多,使目标特性呈现多维度特性。海上目标探测在多维度目标特性的支撑下向检测跟踪识别一体化智能化发展。分布式、马赛克、云作战、多域作战、蜂群等新的作战样式相继出现,目标仍然是焦点,目标特性是核心,多维度目标特性的共享是多域联合作战的重要支撑。海战场向深海、极地和太空拓展,目标向智能、协同、无人化发展。新的作战空间也将产生新的目标特性需求。海上目标特性研究还有很多需要拓展的空间。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
茶道(2022年3期)2022-04-27
红蜻蜓(2021年2期)2021-07-20
舰船科学技术(2021年12期)2021-03-29
流行色(2020年9期)2020-07-16
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
CHIP新电脑(2017年6期)2017-06-19
环球时报(2009-09-16)2009-09-16
