
雷达设备在水文应用中的探析
——以格尔木水文站固定雷达波在线测流系统为例
2020-09-03 07:53周启明
分析仪器 2020年4期
温 川 周启明
(青海省水文水资源测报中心,格尔木 816099)
为贯彻水文[2019]199号文精神,落实水利部提出的“水利工程补短板,水利行业强监管”;推进水文测报先进技术装备配置和应用,加快提升水文现代化水平;实现水文现代化仪器在水文上的应用。格尔木水文站引进固定雷达波在线测流系统。固定雷达波在线测流系统根据水文的实际情况,针对偏远地区,不方便人工值守而设计开发的一套全自动、非接触测流系统,可实现在无人值守的状态下由计算机系统完成对流量数据的采集测量、发送报文、形成报表的自动化系统。
1 固定雷达波在线测流系统简介
固定雷达波在线测流系统由四部分组成。分别为系统控制部分、雷达测速控制部分、供电控制部分(太阳能电池板及蓄电池)和软件控制部分(中心站的测流计算机及流量数据接收处理软件)。
1.1 固定雷达波在线测流系统工作原理
固定雷达波在线测流系统是一套非接触流量测验方案,利用雷达波完成测流断面各设定垂线水面流速的自动监测,在不接触水流的情况下测量河流表面流速,结合水位计测量实时水位数据,利用流速面积法,准确计算现场的实时流量数据。设备外接无线DTU设备,将数据发送到指定的水文站。通讯方式为应答方式,如接收端因关机没有收到的信息,接收端开机后发送端自动补发,测站通讯设备采取发送信息时开机,发送完后自动关机的模式;时实数据可在固定雷达波在线测流系统平台查询。该系统为固定、非接触式,测流时不受定位影响,不受流态影响,能实现远程下载[1]。
1.2 固定雷达波在线测流系统功能
固定雷达波测流系统是利用3个雷达波测流传感器采集流速数据,对准测流垂线实测水面流速,3条垂线测流同时结束。流速测量完成后,结合事先测量的水位数据,计算流量,将数据通过有线(无线)电台等方式传输到指定的计算机,传输的数据包括此次测量的全部数据,如水位、每条垂线的流速、流量、断面面积等。
流量的测量模式参数设置在系统控制器内部存储芯片上,根据需要可修改参数,每次完成测量后,系统控制器将各条垂线起点距、水面流速、当前工作电压等参数打包发送到中心站。中心站流量计算设备接收到数据后,根据流速流量计算模型、水位面积关系表,计算出断面实测流量数据。
1.3 固定雷达波在线测流系统结构
固定雷达波在线测流系统分为现场设备(水文测站)、远程中心站(省中心)、中心水文站三部分。系统通过移动GPRS无线网连接,在水文站安装工控机,接收由现场通过DTU传输的数据,实现对雷达波自动测流系统的远程控制及数据接收显示处理(见图1)。

图1 雷达波自动测流系统总体示意图
2 格尔木水文站固定雷达波在线测流系统安装及日常维护
2.1 格尔木水文站固定雷达波在线测流系统安装
固定雷达波在线测流系统安装在格尔木水文站测流断面的右岸及测桥上。固定雷达波测流系统的控制器、蓄电池、通讯模块、水位计、视频监控设备等安装在监测断面右岸立柱机箱中;3个雷达波测速探头均匀布设在测桥上。探头与水位计用穿线连接;系统控制器和雷达波测速传感器采用RS485通讯;传感器的供电由系统控制器控制。需要测流时,系统控制器给雷达波测速探头供电;完成测流后,系统控制器给雷达波测速探头断电(见图2)。

图2 雷达波测速探头及仪器安装图
2.2 格尔木水文站固定雷达波在线测流系统日常维护
格尔木水文站固定雷达波在线测流系统日常维护包括以下工作:外观、螺丝紧固检查:无机械损伤,各螺丝紧固,防松线无错位,线缆连接良好;雷达传感器角度检查:俯角范围在30°~60°之间;通信模块GPRS检查:发送接收信号正常,供电电压在0~30V之间;测流软件运行检查:软件能正常启闭,顺利完成流量测验;;做好运行日志管理记录[2]。
3 水文中流量测验标准
3.1 流量定义
流量是单位时间内流过江河某一横断面的水量,流量是反映江河、湖泊、水库等水体水量变化的基本数据,也是河流重要的水文特征值。流量监测方法包括流速面积法、水力学法、化学法和物理法,本文介绍流速面积法。
3.2 流速面积法测流公式
流速面积法测流公式为Q=∑Qi=∑AiVi;通过测算部分流速Vi和部分面积Ai,两者的乘积为通过该部分面积上的流量Qi;累计即求得全断面的流量Q=∑Qi。流速面积法流量监测采用流速仪测量断面水深、测点流速,计算流量。
3.3 流速仪法测验误差
由《河流流量测验规范》(GB50179-2015)知流速仪测验误差包括:起点距定位误差,水深测量误差,流速测点定位误差,流向偏角导致的误差,入水物体干扰流态导致的误差,停表或其它计时装置的误差。
4 格尔木水文站固定雷达波在线测流系统的应用
4.1 断面选取
固定雷达波测流系统安装在水流集中,河段较顺直的矩形河槽上,河段上有固定过河设施(测桥),便于固定测速探头。河床由混凝土组成,平均比降为86.0×10-4,无冲淤变化,断面稳定。
4.2 资料收集和分析
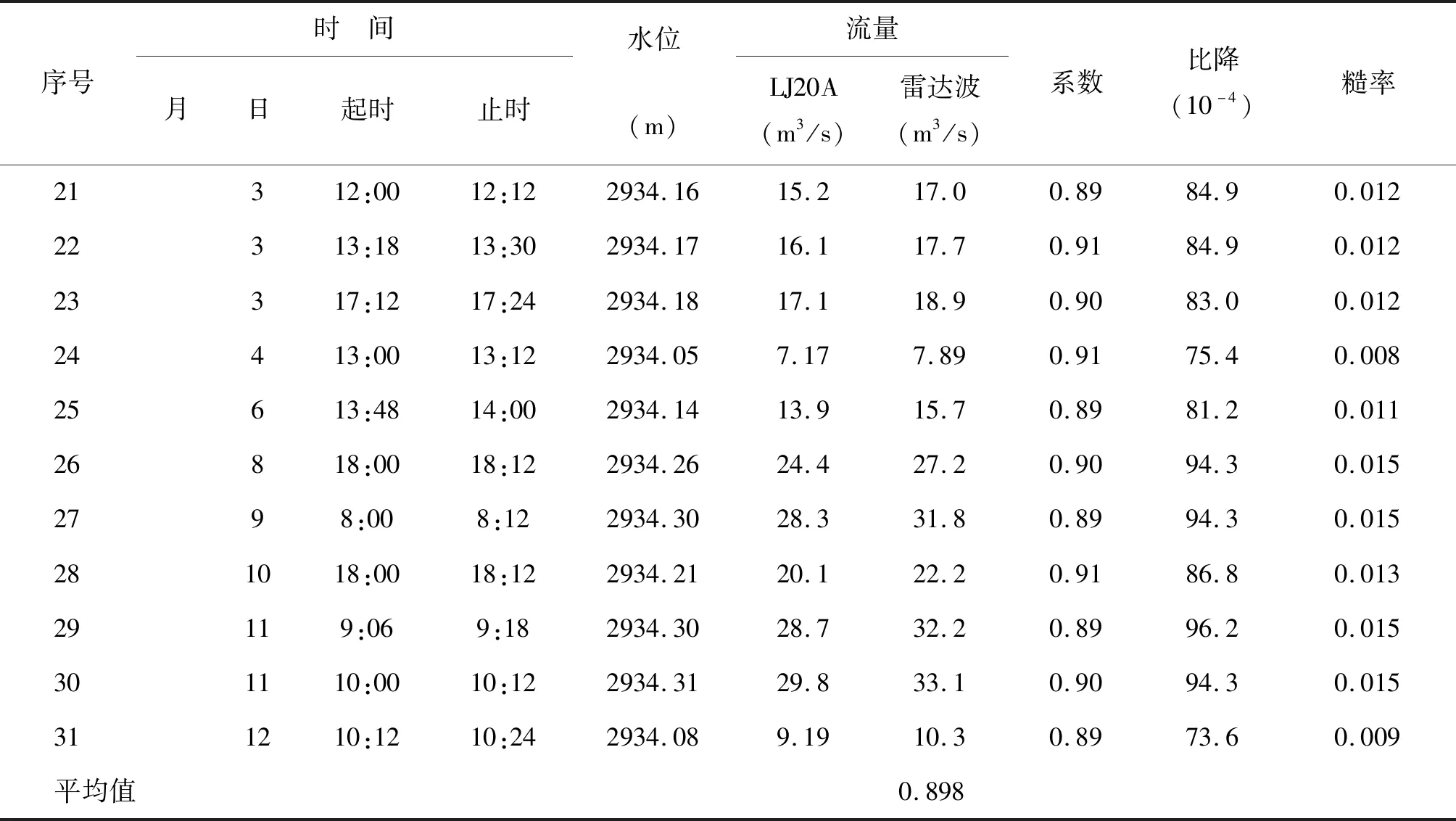
采用雷达波与流速仪在同断面,同时间监测流量,2019年11月26日至2019年12月12日共收集实测资料31份。水位变幅在2934.05m~2934.31m之间,流量变幅在7.17m3/s~29.8m3/s之间,基本控制水位和流量变化范围。雷达波测流传感器采集流速数据为表面流速(水深为0.0),流速仪监测流速数据为水深0.6处的平均流速。雷达波监测流量值大于流速仪法监测流量值;应对雷达波监测流量进行改正,确定雷达波测流系数。
据据《水文资料整编规范》(SL247-2012)和《河流流量测验规范》(GB50179-2015)要求,雷达波测流系数采用算术平均法和图解法进行分析。
4.2.1算术平均法分析固定雷达波测流系数
雷达波测流系数采用如下公式分析,计算出单次流量比测系数。雷达波系数计算公式为:
Kf=Q实/Q虚
式中:Kf—雷达波水面流速系数;
Q实—断面实测流量,m3/s;
Q虚—断面虚流量(雷达波测流流量),m3/s。
分别计算出个单次雷达波测流系数(见表1),然后用算数平均法计算出样本系列的雷达波水面系数系数为0.898。

表1 格尔木水文站流速仪与雷达波测流流量数据
续表1
4.2.2图解法分析分析固定雷达波测流系数
用流速仪法和雷达波法监测出的流量进行点图分析,以流速仪监测流量为实测流量(真值),实测流量为纵坐标,以雷达波监测流量为虚流量,虚流量为横坐标(见图3)。通过图解法得,格尔木水文站雷达波测流系数为0.896,相关系数R2=0.9992,说明两者相关性高。

图3 格尔木水文站雷达波测流系数分析图
对图3中相关曲线进行符号检验、适线检验、偏离数值检验,结果均合格,标准差为1.1%,系统误差为0.0%;均满足《水文资料整编规范》(SL247-2012)要求(见表2)。

表2 流速仪法和雷达波法测流流量相关曲线检验表
通过算术平均法和图解法两种方法分析,算术平均法系数为0.898,图解法系数为0.896,说明二者系数基本一致;综合确定雷达波测流系数为0.90;满足测验精度要求。可作为格尔木水文站雷达波测流系数在测验中使用。
4.3 固定雷达波测流误差分析控制
固定雷达波测流误差来源于测量断面面积和测量流速度产生的误差,与流速仪测流误差比较,雷达波测流系统为固定、非接触式,不受定位、流态影响,可消除起点距定位误差,流速测点定位误差,入水物体干扰流态导致的误差;系统根据实测的水位数据,用水位计算断面面积,可消除水深测量误差;系统设定的测流时间为120秒,可消除停表或其它计时装置的误差。
雷达波误差从测量断面面积和测量流速进行控制。格尔木水文站选取的是矩形断面,无冲淤变化,根据水位计算断面面积,能较好的控制断面面积测验误差。雷达波测速探头测量的是表面流速,运用雷达波与流速仪法测量的数据建立相关关系,运用相关系数进行流速系数改正,控制流速测验误差。
通过对雷达波系数分析;符号检验、适线检验、偏离数值检验;测流误差分析。结果均符合《河流流量测验规范》(GB50179-2015)和《水文资料整编规范》(SL247-2012)的要求。固定雷达波在线测流系统可以投入格尔木水文站流量监测使用。
5 结语
通过固定雷达波在线测流系统在格尔木水文站的应用,雷达波系数合理;系统监测数据与流速仪法监测数据保持一致,误差均在《河流流量测验规范》(GB50179-2015)允许范围内;相关性较高;测验数据无须改正,直接使用。该测流系统可在矩形断面河槽推广使用。
为偏远地区的水文工作,实现无人值守向前迈进一步。该测流系统初步投入使用,应加强该测流系统中仪器稳定性和故障排除的研究分析,用好该测流系统,使该测流系统更好的发挥作用,为实现水文现代化提供技术装备。
猜你喜欢
治淮(2022年11期)2022-12-03
黑龙江水利科技(2022年4期)2022-05-25
黑龙江水利科技(2020年8期)2021-01-21
黑龙江水利科技(2020年11期)2020-12-11
石材(2020年7期)2020-08-24
中华建设(2020年5期)2020-07-24
陕西水利(2020年4期)2020-06-04
黑龙江水利科技(2020年2期)2020-05-07
文萃报·周二版(2019年39期)2019-09-10
水电与新能源(2019年5期)2019-05-30
