
基于视觉引导的无人机自主降落研究
2020-09-02 08:16徐滔宏王志胜鹿山山
机械与电子 2020年8期
徐滔宏,王志胜,鹿山山
(南京航空航天大学自动化学院,江苏 南京 211106)
0 引言
随着无人机技术的发展,无人机在众多领域中得到了广泛的应用。传统的无人机定点降落主要是利用GPS和惯导数据来实现,但在森林、城市街区等场景下,GPS信号易出现偏差和丢失,因而很难为无人机提供自主降落时所需的高精度的导航数据[1-2]。近年来,机器视觉导航技术迅速发展成一种新的导航技术,无人机利用自身搭载的摄像头通过图像算法提取出目标的特征信息,然后解算得到自身的导航信息并反馈给飞控系统完成自主飞行降落。相比于GPS/INS组合导航,视觉导航不受高楼、云层等干扰,定位精度可达到厘米级别,并且不会随时间推移而出现累积误差。现在的视觉导航设备体积小、性能强,十分适用于无人机系统的集成应用。
目前,国内外在无人机视觉引导降落研究中取得了一定的成果,文献[3-6]做了说明。文献[7]设计了一种基于同心圆环嵌套且两圆环之间用红色填充的地标,通过检测该地标的颜色特征来判断是否可以降落,然后再利用椭圆拟合计算地标的椭圆位置来调整无人机的位置和姿态,最后通过实验平台验证了识别算法和位姿估计的有效性。
基于上述的研究成果,本文以四旋翼无人机为实验平台,对无人机的视觉引导降落技术进行研究。
1 地面黑色块像素坐标提取
系统首先将摄像头中的图像信息进行灰度化处理,然后调用机器视觉模块(OpenMV)的库函数blob.cx()、blob.cy()提取出地面黑色块的X、Y轴像素坐标Tx、Ty,并根据通信协议将像素坐标封装成数据帧发送给飞控系统完成无人机相对位置估计。源图像灰度化处理与X/Y轴像素坐标提取结果如图1所示。
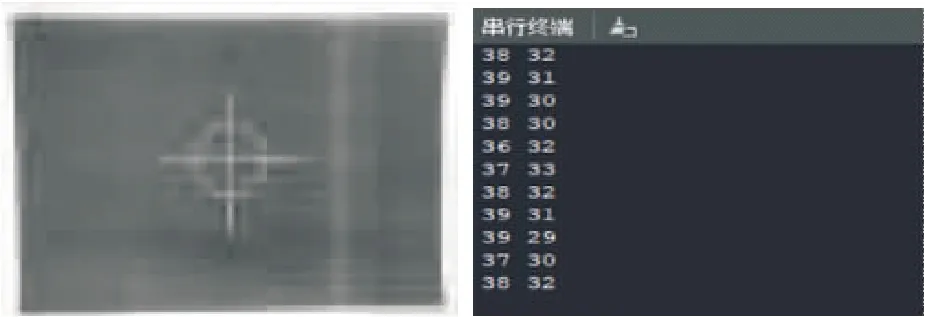
图1 图像灰度化处理与X/Y轴像素坐标提取
2 无人机相对位置估计
在进行视觉引导无人机自主动降落过程中,本文的控制策略是先让无人机水平飞行至地面黑色块上方,然后再进行定速高度下降控制。
为了实现无人机朝向地面黑色块上方飞行,首先估计出无人机与地面黑色块的相对位置,根据这个位置关系对无人机进行水平位置控制,引导无人机水平飞行至地面黑色块上方。由成像原理可得到无人机与地面黑色块在X轴和Y轴上的水平位置偏移量为
(1)
Ps为镜头中每个像素单元对应的物理距离;Px、Py为整个图像平面的中心点像素坐标值40和30;f为摄像头焦距;H为超声波传感器所测得的无人机竖直对地高度;θ、φ分别为无人机的横滚角(Roll)和俯仰角(Pitch)。由于摄像头安装过程中不一定安装在机架正中心,导致在实际定点时无人机不能定在黑色块正上方,因此需要测量摄像头与机架中心在X轴和Y轴上的偏移量Xo和Yo,对估计的无人机相对位置进行补偿。
3 横滚通道水平位置控制器设计
在引导无人机水平飞行过程中,水平位置控制器外环采用PID算法进行控制,并将其输出项映射成期望姿态倾角给到内环姿态环来调整无人机的姿态,以实现视觉引导无人机飞行至地面黑色块上方。以横滚通道为例来进行水平位置控制器设计,其结构形式如图2所示,俯仰通道同理。

图2 无人机水平位置控制器结构
图2中将位置指令置置零是期望能控制无人机不断朝向地面黑色块上方飞行,当无人机与地面黑色块的水平位置差趋于零时,表明无人机正处于地面黑色块上方,然后再进行第二阶段的定速高度下降控制。
4 基于PID的无人机高度控制器设计
自主降落中无人机始终在定高模式下飞行,保持自身高度的稳定,高度控制器采用高度+速度的串级PID控制形式,相比于单级PID,串级PID对无人机的竖直速度也进行了控制,增加了系统的抗扰能力。基于串级PID的无人机高度控制器结构如图3所示。

图3 无人机高度控制器结构
图3中,Hf、vf分别为惯导融合得到的无人机竖直高度和速度;vr为高度环输出的期望速度;Δu为串级PID的输出,实现对无人机的高度控制。
5 实验结果分析
5.1 飞行实验硬件平台
本文以四旋翼无人机为飞行实验硬件平台,平台中安装了4个螺旋桨保护圈,保证了实验的安全性以及避免了无人机坠毁时螺旋桨断裂的情况。实验数据利用3DR无线数传电台回传,便于分析和调试。无人机实物如图4所示。

图4 飞行实验硬件平台
飞行中机器视觉模块(OpenMV)安装于机架下方,用于识别地面目标获取飞行器的相对位置。传感器自身搭载了一颗豪威OV7725摄像头用于采集图像信息,并利用STM32H743VIT6处理器进行图像算法运算,最后通过串口与飞控系统通信,完成信息交互。OpenMV实物如图5所示。

图5 机器视觉模块(OpenMV)
5.2 实验数据分析
无人机从地面定高起飞,飞行过程中当进入视觉定位范围时,水平位置控制器开始调整无人机的姿态并引导无人机朝向地面黑色块上方飞行,然后高度控制器和水平位置控制器进行协调控制引导无人机自主降落至地面黑色块上。基于视觉引导的无人机自主降落实验如图6所示。

图6 视觉引导无人机着陆过程
飞行过程中无人机与地面黑色块在X/Y轴上的水平位置偏移量曲线如图7所示。曲线分2部分,一部分是未进入视觉定位范围时无人机与地面黑色块在X/Y轴上的水平位置偏移量,另一部分是进入视觉定位范围后的偏移量。当无人机未进入视觉定位范围,此时无人机有姿态运动,式(1)在计算无人机相对位置时会进行倾角补偿,因此在未进入视觉定位范围时无人机与地面黑色块的相对位置不为零,在实际飞行中此部分数据不参与控制。
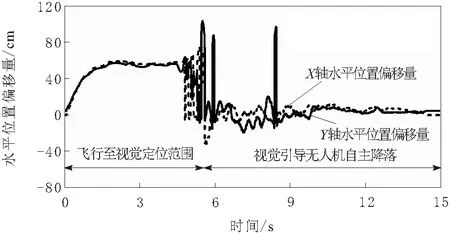
图7 X/Y轴水平位置偏移量
无人机从地面起飞最后视觉引导自主降落的高度变化曲线如图8所示。

图8 无人机高度变化曲线
当无人机飞行到图8中的 A点时,连续30次检测到无人机与地面黑色块在X、Y轴方向上的水平位置偏移量同时在5 cm范围内,系统认定无人机可以进行高度下降控制,无人机以40 cm/s的速度定速下降,同时关闭水平位置控制器;当在下降的过程中检测到不满足下降条件,水平位置控制器重新开始工作并引导无人机朝向地面黑色块上方飞行;当到达B点时,检测到此时满足下降条件,无人机再次进行定速下降控制并关闭水平位置控制器,在下降的过程中检测到不满足下降条件,水平位置控制器重新开始工作并引导无人机朝向地面黑色块上方飞行;当到达C点时,检测到此时满足下降条件,无人机进行定速高度下降控制,最终自主降落至地面黑色块上。
6 结束语
本文以四旋翼无人机为研究对象,利用机载机器视觉模块(OpenMV)来进行整个飞行实验,成功引导无人机自主降落至地面黑色块上。实验结果表明,在室内白色地板条件下,当无人机进入视觉定位范围,通过多次的调整无人机水平位置和高度,最终无人机能自主降落至地面黑色块上,提高了无人机的自主飞行能力。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
地理空间信息(2022年3期)2022-04-01
汽车工程师(2021年12期)2022-01-18
计算机辅助工程(2018年4期)2018-10-09
自然资源遥感(2018年3期)2018-09-04
制造技术与机床(2017年7期)2018-01-19
小学阅读指南·低年级版(2017年12期)2017-12-26
天津诗人(2017年3期)2017-11-14
小朋友·快乐手工(2016年12期)2017-03-31
汽车维修与保养(2015年8期)2015-04-17
