
Resilient Fault Diagnosis Under Imperfect Observations–A Need for Industry 4.0 Era
2020-09-02 04:06:50AlejandroWhiteMemberIEEEAliKarimoddiniSeniorMemberIEEEandMohammadKarimadini
Alejandro White, Member, IEEE, Ali Karimoddini, Senior Member, IEEE, and Mohammad Karimadini
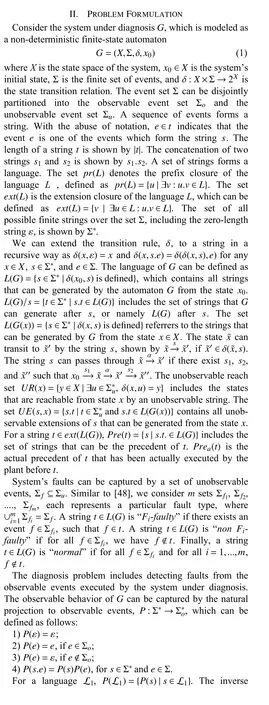
Abstract—In smart industrial systems, in many cases, a fault can be captured as an event to represent the distinct nature of subsequent changes. Event-based fault diagnosis techniques are capable model-based methods for diagnosing faults from a sequence of observable events executed by the system under diagnosis. Most event-based diagnosis techniques rely on perfect observations of observable events. However, in practice, it is common to miss an observable event due to a problem in sensorreadings or communication/transmission channels. This paper develops a fault diagnosis tool, referred to as diagnoser, which can robustly detect, locate, and isolate occurred faults. The developed diagnoser is resilient against missed observations. A missed observation is detected from its successive sequence of events.Upon detecting a missed observation, the developed diagnoser automatically resets and then, asynchronously resumes the diagnosis process. This is achieved solely based on postreset/activation observations and without interrupting the performance of the system under diagnosis. New concepts of asynchronous detectability and asynchronous diagnosability are introduced. It is shown that if asynchronous detectability and asynchronous diagnosability hold, the proposed diagnoser is capable of diagnosing occurred faults under imperfect observations. The proposed technique is applied to diagnose faults in a manufacturing process. Illustrative examples are provided to explain the details of the proposed algorithm. The result paves the way towards fostering resilient cyber-physical systems in Industry 4.0 context.
I. Introduction
ADVANCES in technologies are revolutionizing traditional industries by an increasing shift toward integrated and distributed cyber-physical systems, in so-called Industry 4.0 era [1], where the complexity is moved from the mechanical structures to sensing, perception, planning,control, and decision-making components [2]–[4], and the priorities have shifted from pre-planned automation to reliable autonomy [5], [6]. Such increasingly complex engineered systems, such as industrial internet of things (IIOT) for manufacturing [7], require automatic diagnostic mechanisms with the capability to cipher through these system’s complexities and provide a timely, clear, and concise diagnostic output that ensures reliable and safe system operations in order to achieve cyber-security [8]–[11].
Different diagnosis techniques include but are not limited to mathematical model based approaches [12]–[15], artificial intelligence techniques [16]–[21], fault tree analysis [22],[23], template structures [24], [25], model-checking [26], [27],Bayesian networks [28], and discrete event system (DES)methods [29]–[39]. Among these methods, DES approaches use time-abstract event-driven models of the systems under diagnosis and provide diagnostic information based on highlevel logical behaviors of the systems, which is an effective strategy particularly when dealing with complex systems.Furthermore, DES models naturally capture faults as abrupt changes (events) in the system, which facilitates the analysis of faulty behaviors of the system. More importantly, the topology of a DES model is similar to the human cognitive process on correlating systems’ interactions and the effect(s)of sequences of events [40], [41]. This makes DES framework very suitable for the decision-making layer of a control structure to manage normal/faulty situations toward a desired/safe sequence of events.
DES fault diagnosis has been applied to different systems including power transmission networks [42], automated manufacturing systems [43], communication networks [44],[45], cyber-security [46], and flight control systems [47]. In[48], an event-based diagnosis tool, so-called diagnoser, was developed. Using the abstraction of continuous dynamics of a system, an automaton-based fault detection and isolation technique was introduced in [35]. A state-based DES diagnosis technique was studied in [49]. In [50], a learningbased diagnosis technique is introduced for diagnosis of an unknown DES system, and in [51]–[53], an asynchronous diagnosis technique is developed, relaxing the generally required synchronous initialization between the diagnoser and the system under diagnosis. Once a fault is diagnosed, faultaccommodation techniques can be employed to recover the system [54]–[56].
All aforementioned DES fault diagnosis techniques rely on perfect observations of sequences of events executed by the system under diagnosis. However, in practice, it is common that due to the problems in sensor-readings or communication/transmission channels, an observation is missed. In these situations, the integrity of the observed sequence may lead to missed or improper diagnosis. This can result in the system with improper operation that it needs to switch out of, or erroneous execution of an incorrect recovery action. When multiple local diagnosers are available, [57] introduced a trace-based diagnosis process which can handle timing mismatch and channel distortion in a distributed setting.Reference [58] has addressed the problem of robust diagnosis,when diagnosers are themselves subject to failures, by taking the advantage of collective decision-making in a decentralized structure. In [59], a probabilistic method is developed for fault diagnosis, which captures the loss of communication/observation as faulty events with a certain probability. An alternative solution to address the robust fault diagnosis problem is to consider the loss of observation of an event at a particular part of the model as a fault and treat it as an intermittent fault [60], [61] or as a permanent fault [62].However, loss of observation may happen anytime anywhere,and considering an associated intermittent or permanent fault for the loss of observations for all events at different locations in the system will significantly make the system’s analysis complex.
This paper addresses these challenges by proposing a novel event-based fault diagnosis technique which is resilient against missed observations. Here, the main difficulty is that when an observation is missed, the inference of the diagnosis being made based on subsequent observed events will be compromised. By now, the only solution in this situation is to restart the diagnosis process to track a valid sequence of events in the system under diagnosis. However, by resetting the diagnosis process, the past history of information about the system under diagnosis will be missed at the reset time,leaving us with a challenge to diagnose occurred faults based on post-reset/activation of the diagnoser. To tackle these problems, the proposed diagnoser automatically detects missed observations, resets, and then, resumes the diagnosis process, without interrupting the operation of the system under diagnosis. The new concepts of asynchronous detectability and diagnosability are introduced. It is also shown that if the asynchronous detectability and diagnosability hold, the developed diagnoser can detect the occurred faults under imperfect observations. The developed method is applied to the diagnosis of faults in a manufacturing system.
The rest of the paper is organized as follows. Section II provides the preliminaries and required definitions,descriptions, and notations utilized in the modeling and diagnosis of the DES systems. This section is concluded with a formal problem statement for resilient fault diagnosis. In Section III, the structure of the proposed diagnoser is explained followed by developing an algorithm for constructing the proposed resilient diagnoser. Section IV reviews some of the properties of the developed diagnoser.Section V derives the conditions for asynchronous diagnosability of occurred faults in a DES system under imperfect observations, and finally, Section VI concludes the paper.



VI. Conclusion
This paper developed a diagnosis technique which is capable of diagnosing faults under imperfect observations. A new concept of asynchronous detectability was introduced,which, if holds, allows to detect a miss observation from its post observations. Upon detecting a missed observation, the diagnoser resets and resumes the diagnosis process. It was proven that if the missed observations are asynchronously detectable and if the faults are asynchronously diagnosable,the developed diagnoser can detect the occurred fault despite missing the observations of asynchronously detectable events.
Acknowledgment
The U.S. Government is authorized to reproduce and distribute reprints for Governmental purposes notwithstanding any copyright notation thereon. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of NSF, AFRL,OSD or the U.S. Government.
 IEEE/CAA Journal of Automatica Sinica2020年5期
IEEE/CAA Journal of Automatica Sinica2020年5期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Variational Inference Based Kernel Dynamic Bayesian Networks for Construction of Prediction Intervals for Industrial Time Series With Incomplete Input
- Arbitrary-Order Fractance Approximation Circuits With High Order-Stability Characteristic and Wider Approximation Frequency Bandwidth
- Finite-time Control of Discrete-time Systems With Variable Quantization Density in Networked Channels
- Time-Varying Asymmetrical BLFs Based Adaptive Finite-Time Neural Control of Nonlinear Systems With Full State Constraints
- Secure Impulsive Synchronization in Lipschitz-Type Multi-Agent Systems Subject to Deception Attacks
- Decision-Making in Driver-Automation Shared Control: A Review and Perspectives