
智能高速铁路ATO列车计划传输方案研究
2020-09-01 08:54桂乐琴宋鹏飞
铁道运输与经济 2020年8期
高 峰,桂乐琴,宋鹏飞,许 伟,王 涛
(1.北京华铁信息技术开发有限公司 行车指挥自动化事业部,北京 100081;2.中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
京张智能高速铁路(北京北—张家口)重大工程的建设,标志着当前我国高速铁路正在从自动化、数字化、网络化阶段向着智能化阶段发展[1]。在高速铁路智能化发展过程中,高速铁路自动驾驶系统(以下简称ATO系统)和智能调度指挥系统(以下简称CTC系统)可以实现列车控制自动化与调度指挥智能化[2],还可以通过系统间的数据交互,保障列车自动驾驶的准点率,降低列车运行能耗,提高智能高速铁路整体运输效率。既有的CTC系统计划信息的接收者是车站,包含将要经过车站列车的信息[3-4],由中心调度台发往车站分散自律设备;而在智能高速铁路系统中,CTC系统计划信息的接收者是列车,包括列车将要经过的车站信息及车站内的作业情况信息。复兴号智能动车组可以根据CTC系统提供的ATO列车计划,获取前方车站的作业内容,提前选择最优的列车控制模式,控制车组精准地完成既定运输任务[5-6]。由于发往复兴号智能动车组的ATO列车计划与既有的CTC系统计划在数据内容、接收对象上有较大差别,因而需要以CTC系统为基础,制订新的ATO列车计划传输方案,明确计划内容,分析计划数据组包及传输方式,建立数据动态更新机制,充分满足ATO系统功能需求。
1 智能高速铁路ATO列车计划
1.1 传输途径
智能高速铁路ATO列车计划根据CTC系统结合ATO列车注册信息,在ATO接口服务器组包生成。该信息经由ATO接口服务器、TSRS服务器、GSM-R分组数据业务GPRS相关通信设备、车载GPRS电台、车载无线通信单元,发送至车载ATO单元设备[7]。ATO列车计划传输相关系统结构示意图如图1所示。
1.2 数据类型
根据智能高速铁路ATO系统原理,ATO列车计划数据包含列车运行前方2个连续车站的计划到达时刻、计划出发时刻、计划站内停靠股道、作业类型、作业时间等。
(1)计划到达、出发时刻。ATO列车在区间内自动运行时,需要根据前方车站的计划到达时刻和出发时刻,判断在前方车站是否停站,结合列车自身牵引制动性能,自动选择最优区间运行曲线,并根据该曲线控制列车速度,达到准确控制列车实际到达、出发时刻的目的。
(2)站内作业类型。根据站内作业类型,判断列车进站停稳后,是否需要联动开启车站门与站台屏蔽门。目前,只有作业类型为“乘降”时,列车会自动开启车门。
(3)站内停靠股道。在站内作业类型为“乘降”时,需要根据站内停靠的股道信息,进一步判断车门开启方向,正确开启对应方向的车门与站台门。
(4)作业时间。以“乘降”作业为例,当车门与站台门开启的时间(乘降作业时间)超过计划作业时间后,自动关闭或提醒司机一键操作关闭车门与站台门。
列车运行曲线的生成通常是基于前方第1个车站的计划信息。但是,如果列车运行前方的第1个车站为线路所,或者列车于此站通过不停车,ATO系统可以将前方第1个车站视为区间,并结合列车运行前方第2个车站的计划时间,选择更优的运行曲线控制列车速度。
2 智能高速铁路ATO列车计划传输方案
2.1 计划传输关键技术
2.1.1 前方车站判断
智能高速铁路列车运行过程中,ATO列车计划需要根据列车的前方站变化动态更新,因而需要实时确定ATO列车的位置,以判断列车的前方站。根据CTC系统的既有功能,判断列车位置的方法有以下3种。
(1)列车注册信息。列车注册信息由TSRS服务器提供,包含列车所在位置的公里标数据。为此,在CTC系统中建立线路对象的公里标映射表,以及线路对象与车站或区间的从属关系。在判断列车前方站时,首先根据列车注册信息中的公里标,确定列车所处位置的线路对象;然后,确定该线路对象所属车站或区间,再结合列车运行方向,确定列车的前方站。这种方法用于列车在区间运行时的定位较为准确,而当列车位于车站内时,如果车站站型复杂,仅凭公里标不能准确判断列车的具体位置,导致无法识别列车的前方站是本站还是下一车站(列车未完全进入本站的股道前,ATO列车计划中的第1个前方站依然是本站)。
(2)车站报点信息。车站报点信息可以分为到达时刻、出发时刻和通过时刻,可以根据车站的报点信息,判断列车是否已经进入、离开某车站,再根据列车运行方向确定列车的前方站。车站报点信息确定列车位置示意图如图2所示。图2中,车站A,B,C为3个连续车站,列车运行方向为A→B→C。列车计划始发自A站,经过B站,终到C站。当A站上报出发时刻时,可以认为列车已经离开A站,因而确定列车的2个前方站为B,C;当B站上报到达时刻时,由于本站的计划尚未完成,仍然确定列车的2个前方站为B,C;当B站上报通过时刻或出发时刻时,可以认为列车已经离开B站,因而确定前方站为C。这种方法简单易行,理论上适用于列车前方站的判断。但是,如果CTC系统因为网络原因导致追踪自动报点信息丢包,或者值班员人工误操作导致列车前方车站提前报点,会导致ATO列车前方站判断错误,抗干扰性较差。
(3)CTC系统追踪子系统的列车位置信息。CTC系统会持续追踪列车并对外发送位置信息,但此位置信息并非精准的列车位置,而是包含有位置标志和所属车站站码的信息,其中位置标志包含有接车区间、接车进路、计划股道、发车进路、发车区间等5项内容,分别表示列车于当前车站的位置情况。如果位置标志显示为接车区间、接车进路或计划股道,可以判断ATO列车计划中的前方第1个车站仍然为当前车站;如果位置标志显示为发车进路或发车区间,则判断ATO列车计划中的前方第一车站为当前站的下一车站。此信息只有在列车位置标志发生变化时才会对外发送,如果站间区间较长,列车位置长期处于发车区间或接车区间状态,会导致长时间无法收到列车位置信息,进而无法设定判断该信息发送的超时标准,难以保证ATO列车计划的实时性。
通过分析比较,决定综合利用注册列车公里标信息和列车位置标志信息对列车前方车站进行判断。注册列车公里标信息的判断优先级高于列车位置标志信息,只有通过列车公里标信息无法唯一确定站内线路对象时,再以当前最新的列车位置标志信息判断列车前方车站。
2.1.2 站车计划一致性保持
智能高速铁路ATO列车计划应与前方车站计划保持一致。但是,部分大型车站或者衔接多个方向车站的站型复杂,车站计划调整频繁,为了保证安全,提升作业效率,往往采用“分散自律—车站操作”模式。在此模式下,车站值班员可以修改本站的列车计划(包括股道和作业类型)。如果前方车站的计划发生改变,应实时更新ATO列车计划。
(1)根据行车调度台计划更新ATO列车计划。CTC系统会自上而下保持行车调度台计划与车站计划一致,即当行车调度台的计划运行线发生调整时,车站对应的计划会同步更新[8-9]。但是,在车站操作模式下,车站对本站计划的操作优先级高于中心行车调度台。车站值班员修改了股道或作业类型后,如果行车调度台再次修改并下达计划,车站的列车计划仍然保持车站值班员修改的计划不变,此时车站计划与行车调度台计划数据不一致。如果ATO列车计划随着行车调度台计划线实时更新,则会导致ATO列车计划与实际的车站计划不一致。
(2)根据车站分散自律系统的计划指令信息更新ATO列车计划。车站分散自律系统会对外发送本站列车计划指令信息至各操作终端,实时显示本站的列车计划状态,此信息中包含计划列车车次号、计划股道、计划时间、股道作业等。该信息以“实时+定时”的方式发送。依据此信息动态更新ATO列车计划,可以保持ATO列车计划与车站计划的一致性。ATO列车计划更新相关数据流示意图如图3所示。
2.2 传输流程
智能高速铁路ATO列车计划传输流程包括计划生成、计划发送、计划更新、计划完成4个过程。ATO列车计划传输流程示意图如图4所示。
2.2.1 计划生成
ATO列车计划最初由行车调度台计划数据转换生成。计划运行线数据的每一个节点代表一个车站。信息转换时,首先将计划运行线各节点信息按时间先后进行排序、编号、计数,抽取节点信息中的车站站码、计划时间、计划车次、计划股道、股道作业、作业时间等关键数据,重新组包生成最初的ATO列车计划。计划运行线节点分为始发、终到、到开、通过、接入、交出等类型。计划运行线节点类型如图5所示。

图3 ATO列车计划更新相关数据流示意图Fig.3 ATO train plan update related data flow

图4 ATO列车计划传输流程示意图Fig.4 ATO train plan transmission process
(1)始发节点。对应节点顺序为1,计划到达时间为空,计划出发时间有效。因为ATO列车计划中最初始的前方车站即为始发站的下一站,所以不发送始发站的计划信息。
(2)终到节点。对应节点序号与总节点数相同,计划到达时间有效,计划出发时间为空。
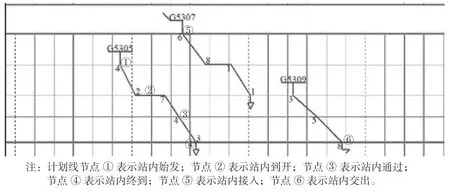
图5 计划运行线节点类型Fig.5 Node type of planned operation line
(3)到开节点。对应节点序号非1非总节点数,计划到达、出发时间均有效且不相同。
(4)通过节点。对应节点序号非1,且非总节点数,计划到达、出发时间均有效且相同。
(5)接入节点。计划为邻台接入计划,列车始发站非本行调台所辖车站,且在本行调台节点序号为1,计划到达、出发时间均有效。对于接入站,ATO列车计划将其作为最初始的前方车站。
(6)交出节点。对应节点序号与总节点数相同,计划到达、出发时间均有效。交出站往往为2个相邻行车调度台的分界站,ATO列车计划中交出站的计划信息会额外标注发车口编号。此编号可以辅助TSRS服务器完成与相应邻台ATO列车计划的拼接,保证ATO列车计划跨台传送的连续性。
2.2.2 计划发送
ATO列车的注册信息是ATO列车计划发送的必要条件。CTC系统依据车次号将ATO列车注册信息与初始的ATO列车计划进行匹配,匹配成功后,对外发送ATO列车计划。在ATO列车运行过程中,仍然会实时监控列车注册信息并进行超时判断,如果超时没有收到该信息,则停止对外发送对应的ATO列车计划,然后保持当前ATO列车计划,等待再次匹配。
2.2.3 计划更新
(1)更新ATO列车前方车站计划信息。确定ATO列车位置,找到当前位置所属车站在完整计划中的节点顺序。如果列车未越过计划股道,则判定当前车站为第1前方车站;如果列车已越过计划股道,则判定下一节点顺序对应的车站为第1前方车站。
(2)根据前方车站列车指令信息更新ATO列车计划。只处理来自ATO列车前方车站的列车指令信息,已经过车站的指令信息不再监测与处理。
2.2.4 计划完成
在2种场景下,CTC系统可以判断ATO列车计划已经完成。在这2种场景下对ATO列车计划的处理方式有所不同。
(1)到达终到车站。当ATO列车前方车站为站内终到,且列车位置为前方车站的计划股道时,判断列车已经到达终到车站。此时,ATO列车计划已经完成,停止对外发送该计划,系统内部同步删除此信息。
(2)驶出交出车站。当ATO列车前方车站为站内交出,且列车位置为前方车站的发车进路或发车区间,则判断列车已经驶出交出车站。此时,ATO列车计划已经在本行车调度台所辖范围内完成。但是,考虑到TSRS服务器需要拼接跨台的ATO列车计划,所以设定延迟停止发送时限。在规定时间范围内,如果收到ATO列车注销信息,则停止对外发送ATO列车计划,并同时在系统内部删除;如果超时仍未收到列车注销信息,同样不再对外发送ATO列车计划,并在系统内部删除。
3 结束语
智能高速铁路ATO列车计划传输方案为智能高速铁路ATO系统的高效、可靠运作提供技术支撑。截至目前,京张智能高速铁路已经在线运营,ATO列车计划传输方案已经在京张智能高铁系统中得到有效应用,京张复兴号动车组在列车自动驾驶系统操控下安全、高效地完成了运输任务,进一步证实ATO列车计划传输方案的可靠性与有效性,为我国高速铁路信号系统智能化发展奠定基础。另外,还需要在实践中根据现场需求,调整和完善智能高速铁路ATO列车计划的传输方案,进一步提升列车运行调度指挥的效率。
猜你喜欢
科技创新导报(2021年31期)2021-05-10
智慧少年·故事叮当(2021年4期)2021-05-06
建材发展导向(2021年24期)2021-02-12
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年7期)2020-02-06
领导决策信息(2017年17期)2017-06-21
山东工业技术(2016年15期)2016-12-01
新民周刊(2016年20期)2016-05-25
妇女生活(2015年5期)2015-09-10
中华少年(2009年9期)2009-09-14
