高机动平台定向Ad Hoc测试验证方法
2020-08-31 01:33侯波涛
无线电工程 2020年9期
侯波涛
(中国西南电子技术研究所,四川 成都 610036)
0 引言
随着天线技术和无线通信技术的飞速发展,基于定向天线的移动自组织网(Mobile Ad Hoc Networks,MANET)得到越来越广泛的应用[1-2]。定向天线技术可增加空间复用率,提高网络吞吐量,减少干扰和被探测的概率[3-4]。基于定向通信的Ad Hoc网络是一种新型的航空通信方式,具有无中心、多节点和拓扑变化迅速等特点[5-6]。实时性要求较高的场合一般采用TDMA接入机制。
高机动平台高速移动的节点和动态变化的拓扑使基于定向天线的Ad Hoc网络MAC协议、邻居发现、路由算法设计较复杂,给系统的测试验证带来了困难[7-8]。定向通信要求通信双方波束同时指向对方且收发属性相反才能完成通信,传统的全向通信测试方法无法模拟定向天线的波束特性。目前,基于定向通信网络的仿真验证手段较多。文献[9-10]分析了几种定向通信的仿真验证方法;文献[11]提出了一种定向通信网络资源分配算法及仿真方法,但是针对定向通信系统的MAC协议、邻居发现和路由算法的测试验证方法研究较少,本文提出一种定向Ad Hoc网络的实验室有线测试验证方法,包括对邻居发现、波束跟踪误差、信道分配、路由算法、功率控制、数据传输以及网络稳定性等测试验证,可用于定向Ad Hoc通信系统实验室有线测试验证和事后数据分析,比仿真更具有真实性。
1 系统组成及工作原理
1.1 系统组成
测试系统如图1所示,其中多节点模拟器模拟多个网络节点,每个节点具有独立的多发多收中频通道和天线低频控制接口。天线模拟器模拟天线低频接口,处理逻辑和实装天线一致,计算天线指向与理论指向误差并生成控制射频交换网络的控制码。射频交换网络模拟所有网络节点多个中频通道间的所有通路,根据天线模拟器发送的控制码进行射频通路切换,同时可对所有通路进行程控衰减,天线模拟器到显控计算机的定时控制用于惯导数据和真实指向数据的周期定时下发。信道模拟器借助专用信道模拟器或通用仪器辅助实现,可模拟高斯信道、空间时延及多普勒频偏等功能。显控计算机可用于场景生成、链路控制、功率控制、数据模拟、数据记录和回放以及数据分析。

图1 测试系统组成Fig.1 Test system composition diagram
1.2 工作原理
系统测试流程如图2所示。

图2 系统测试流程Fig.2 System test flow chart
① 显控计算机选择场景并下发初始化参数、惯导数据给多节点模拟器,下发初始化参数和真实指向数据给天线模拟器。
② 多节点模拟器加载初始化参数并启动入网流程。
③ 天线模拟器接收多节点模拟器输出的天线低频控制信号,解析出波束指向、频率、收发状态和功率控制等信息。
④ 对于通信节点A和B,天线模拟器解析A的天线波束指向信息并进行坐标转换,转换到机体直角坐标系坐标(x1,y1,z1),根据余弦定理计算与实时接收到的A到B的理论指向(x2,y2,z2)的夹角θ1,此为A到B的波束指向误差,同理,可计算B到A的误差θ2,多个通信节点需计算两两之间所有的指向误差。
⑤ 当且仅当θ1,θ2同时小于门限值(一般取定向天线3 dB波束宽度的一半)且A,B收发状态相反、频率一致时,天线模拟器下发控制码给射频交换网络,导通A到B、B到A之间对应的2条中频链路,A与B组网成功,多个网络节点需导通多条中频链路。
⑥ 根据测试用例生成测试数据,对场景进行可视化回放并对记录数据进行分析。
2 关键技术及具体实现
2.1 场景及真实指向生成
利用Satellite Tool Kit(STK)软件对模拟场景或真实场景生成测试用惯导数据和真实指向数据,过程如图3所示。
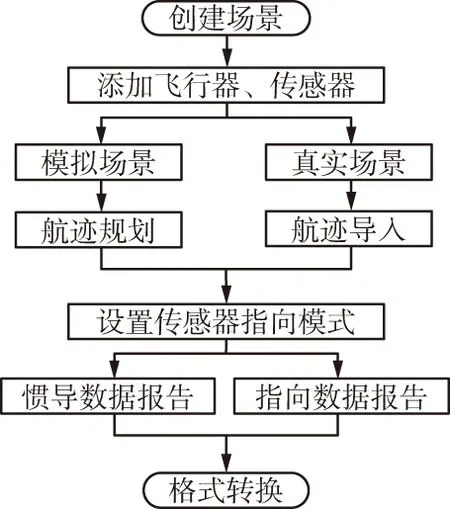
图3 惯导及真实指向数据生成流程Fig.3 Flow chart of INS and real pointing data generation
① 创建场景,添加飞行器、传感器组件,分别模拟网络节点和定向天线的波束。
② 对于模拟场景,规划飞行器的航迹,如规划测试用例中的高机动航迹、距离动态变化航迹和空分航迹等。对于真实场景,导入位置及姿态数据。
③ 设置传感器指向模式为Targeted,跟踪对象为目标网络节点,对于多节点场景需设置多个传感器分别跟踪不同的网络节点。
④ 惯导数据和真实指向数据生成,将飞行器的经纬高、速度加速度、姿态及姿态速度数据生成报告,将传感器的瞄准线向量的(Parent BodyX,Parent BodyY,Parent BodyZ)坐标生成报告。惯导数据和真实指向数据的时间根据场景时间严格对齐,真实指向数据生成周期不大于惯导数据生成周期。
⑤ 4个网络节点需生成4个惯导数据和12个真实指向坐标,将生成的数据格式进行坐标转换,生成本系统所用格式。
2.2 拓扑及链路模拟
对于节点A,四节点网络情况下典型拓扑如图4所示,分为全连通、一跳邻居、双一跳邻居和两跳邻居4种状态。为了测试不同网络拓扑下的邻居发现能力、拓扑维护能力、数传能力、路由能力、网络状态转换能力及自愈能力,需模拟不同的网络拓扑和链路状态。本系统采用系统时延更小的基于链路状态信息的主动式路由机制,网络拓扑可根据链路状态模拟实现。对于通信节点A和B,可设置A到B、B到A的双向链路状态,模拟TDMA体制下的A发B收和B发A收的双向链路,特殊情况也可模拟单边通的情况。图4(d)中节点A到D为两跳中继,需同时设置A和C,D之间、B和D的所有链路,链路状态设置界面如图5所示,断开时长为通信时隙的整数倍,周期可配置。

图4 四节点网络典型拓扑Fig.4 The typical topology of four-node network
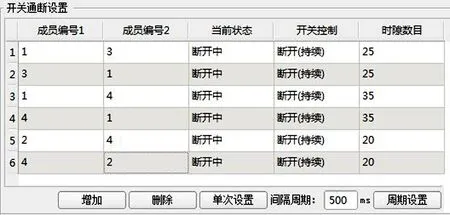
图5 中频链路通断设置界面Fig.5 The on-off setting interface of intermediate frequency link
2.3 测试用例设计
根据图4的网络拓扑设计测试用例如表1所示,分为基本测试项和边界测试项。对每个测试用例的拓扑状态、链路状态、链路衰减、场景、数据及信道特性进行了相应设计。

表1 四节点网络测试用例Tab.1 Test cases for four-node network
用例1:波束跟踪误差存在多方面影响因素,如位置及姿态误差、波束跃度误差和天线安装误差等,但主要是高机动情况下的姿态及位置(近距离)造成的外推误差[12]。测试系统实现中频链路导通是通过判断节点波束指向与真实指向的偏差来实现的,通过模拟高机动惯导数据可测出波束指向误差,测试结果如图6所示。由图可以看出,波束指向误差随着横滚角的变化会出现波动,最大误差小于1.2°,小于波束宽度的1/10,系统跟踪性能良好。

图6 高机动航迹的波束指向误差Fig.6 Beam pointing error of high maneuvering track
用例2:在无线试验过程中,由于天线副瓣的存在,距离较近时即使有功率控制策略也较难测得实际的入网时间,因此入网时间的实验室验证很有必要。根据空域搜索策略特点生成不同相对位置的场景数据,测试各场景的入网时间。双节点的相对位置为三维球体中的任意2点。图7模拟平面4组不同位置场景,通过数据分析结果如表2所示,入网时间1和入网时间2分别为位置1、位置2做询问站的情况。根据测试结果,结合时隙分配及空域搜索策略计算出的理论入网时间,验证系统实现与设计一致性。
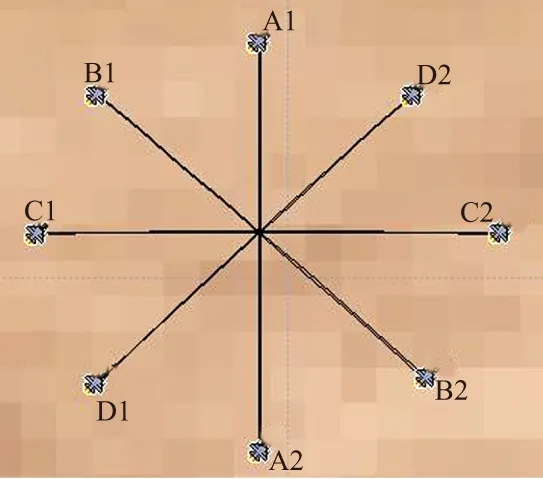
图7 不同相对位置的场景规划Fig.7 Scenario planning of different relative positions

表2 不同相对位置入网时间测试结果Tab.2 Access time test results of different relative positions
用例3:主要测试图4不同网络拓扑下的邻居发现能力和路由能力。中继节点间入网需要在直连节点入网后通过路由信息感知,入网时间也会相应增加。
用例4:定向天线可增加空间复用率,从而增加网络吞吐量,TDMA系统需要在网络拓扑满足条件时配置多信道协同工作,同时实现SDMA,主要测试不同网络拓扑下的信道动态配置能力。如图8所示场景,节点A,B,C,D从初始位置移动到(A1,B1,C1,D1)最后到(A2,B2,C2,D2)的过程中,节点A对于节点B,C,D只有在过程中的部分时间段才能启动多信道并行工作。节点B对于节点A,C,D可全程启动多信道并行工作。对过程中的波控状态及通道导通情况、数据传输情况进行分析,验证系统的信道分配策略是否符合设计。
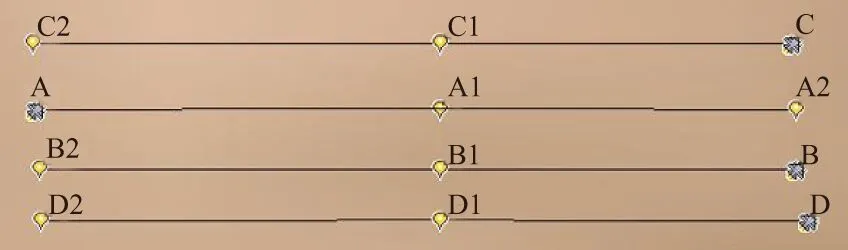
图8 四节点空分航迹规划Fig.8 Air separation track planning of four-node network
用例5:测试不同网络拓扑下的数据传输能力及路由能力。数据模拟包括不同周期、不同长度和不同优先级的消息,对数据传输的吞吐量、丢包率和端到端时延等服务质量进行测试验证。通过对链路进行短暂的配置验证高优先级数据的重传能力。4种不同优先级消息的端到端时延及数据吞吐量的变化曲线如图9所示,高优先级消息的平均端到端时延应小于低优先级消息。

图9 不同优先级消息时延及吞吐量Fig.9 Delay and throughput of different priority messages
用例6:良好的功率控制不但可降低被探测的概率,还可有效减少对外界的干扰[13]。功率控制原则是在目标方向上的辐射能量刚好满足正常通信需求。天线模拟器可实时显示天线的程控衰减值A1,通过不同距离场景调节中频链路衰减值A2,叠加实装天线等效的高斯白噪声,使系统调节到稳定状态。设置A1与A2联动变化,通过场景的距离变化和噪声功率的动态调节,观察接收端的信噪比估计值,验证系统功率控制策略是否符合设计。
用例7:根据载波频率及相对速度可计算节点间的多普勒频移,可借助信道模拟器实现测试。本系统物理层信号处理以时隙为单位,持续时间为ms级,对多普勒频偏不敏感。
用例8:高机动Ad Hoc的网络节点是动态性、临时性且瞬变的,需要测试网络拓扑的动态切换能力和自愈能力。将链路状态设置为周期断开状态,节点间的链路将周期从连接到间接再到连接,多种网络拓扑随着链路状态动态切换,通过拷机测试网络的稳定性。
用例9:对于TDMA系统,时隙持续时间较短,空间延迟对组网和数据传输有直接影响。随着通信距离的增加,物理层数据帧长度需动态调整,调整步进为物理层信号处理的一个编码块的长度。数据发送长度lensend的计算方法为:
(1)
式中,tslot为时隙持续时间;t1为空间传播时延;t2为同步保护时间;tcode为物理层一个编码块的持续时间;lencode为一个编码块可发送的用户数据比特数。
用例10:通过叠加噪声使系统工作在灵敏度状态,此时物理层数据传输有随机错误,测试网络管理消息及用户数据的随机错误会不会导致网络无法恢复,通过拷机测试系统高误码情况下的鲁棒性。
用例11:多节点模拟器的中频信道具有模拟agc功能,仅进行电平的衰减无法模拟有源天线的噪声特性。为了测试实装天线的通信能力,将中频链路进行程控衰减得到接收信号电平,用通用仪器叠加高斯白噪声模拟天线的工作噪声,可模拟不同距离的接收端载噪比C/N0,测试系统工作的边界值。根据式(2)可计算接收端C/N0,其中L为总损耗,包括自由空间损耗、大气损耗和雨衰损耗等传输损耗以及指向损耗、极化损耗和天线罩损耗等固定损耗:
C/N0(dB/Hz)=EIRP(dBW)+G/T(dB/K)-L(dB)+228.6。
(2)
2.4 场景可视化
将各节点位置及姿态数据、波束指向数据导入STK软件,可以对整个过程进行三维可视化回放。如图10所示,可以直观地看出各网络节点的波束对准情况和切换情况,通过导入地形数据可进一步进行遮挡及覆盖分析。

图10 三维可视化回放Fig.10 3D visualization playback
3 结束语
定向天线用于Ad Hoc网络后,可显著提升网络的性能。本文介绍了一种定向Ad Hoc网络的实验室有线测试验证方法,对相应的测试用例及结果进行了分析,此方法在实验室可模拟真实场景,通过中频有线方式对系统的定向MAC协议、邻居发现和路由算法等进行较全面的上机测试。随着网络规模的进一步提升,后续需研究在大规模组网情况下Ad Hoc的测试验证方法。
猜你喜欢
信息通信技术(2022年2期)2022-05-31
汽车实用技术(2022年5期)2022-04-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
福建基础教育研究(2019年6期)2019-05-28