覆冰四分裂导线的气动特性与舞动特性
2020-08-29 06:16闵光云刘小会孙测世蔡萌琦
科学技术与工程 2020年21期
闵光云,刘小会*,严 波,孙测世,蔡萌琦
(1.重庆交通大学省部共建山区桥梁及隧道工程国家重点实验室,重庆 400074;2.重庆交通大学土木工程学院,重庆 400074;3.重庆大学航天航空学院,重庆 400044;4.成都大学建筑与土木工程学院,成都 610106)
当冬季来临,由于覆冰的影响输电线自身的圆形截面会变为非圆形,当非圆形截面覆冰导线受到来自水平方向的风荷载作用时,线路自身会产生空气动力[1-3]。由于空气动力的存在,在一定大小的攻角下覆冰导线很容易发生舞动[4]。覆冰导线的舞动是一种低频、大振幅的自激振动,具有强烈的几何非线性特点,即大位移、小应变[5-13]。大幅度的舞动会造成线路频繁跳闸与停电,而长时间大幅振动所产生的交变张力会使得螺栓松动或损坏[2-3],进而导致断股、金具磨损以及塔臂破坏等严重事故[14-15]。关于舞动发生的原因,Den-Hartog[16]提出了竖向失稳机理,以Nigol[17]为代表的研究人员提出了竖向-扭转二自由度耦合的舞动机理。此外还有科技工作者提出了其他舞动机理,但是只有Den-Hartog机理、Nigol机理受到了学术界青睐。
基于此,首先通过风洞试验研究了尾流效益对气动力系数曲线走势的影响,再采取等效替代法得到了四分裂导线等效气动力系数曲线,并观察等效后的四分裂导线气动力系数曲线的趋势,最后推导了覆冰导线y轴、z轴方向的气动力3次拟合曲线表达式,结合MATLAB软件研究了覆冰四分裂导线的舞动特性。
1 覆冰四分裂导线气动此系数试验
1.1 覆冰四分裂导线数学模型
虽然由于地形、温度、风速以及导线结构参数等不同,分裂导线的覆冰冰型纷繁多样,但是由日本学者调研观察得知,覆冰冰型主要表现为新月形冰型[7]。因此只针对新月形覆冰冰型进行讨论,且只研究覆冰厚度为12 mm的覆冰冰型。首先建立四分裂导线节段模型图,如图1所示。
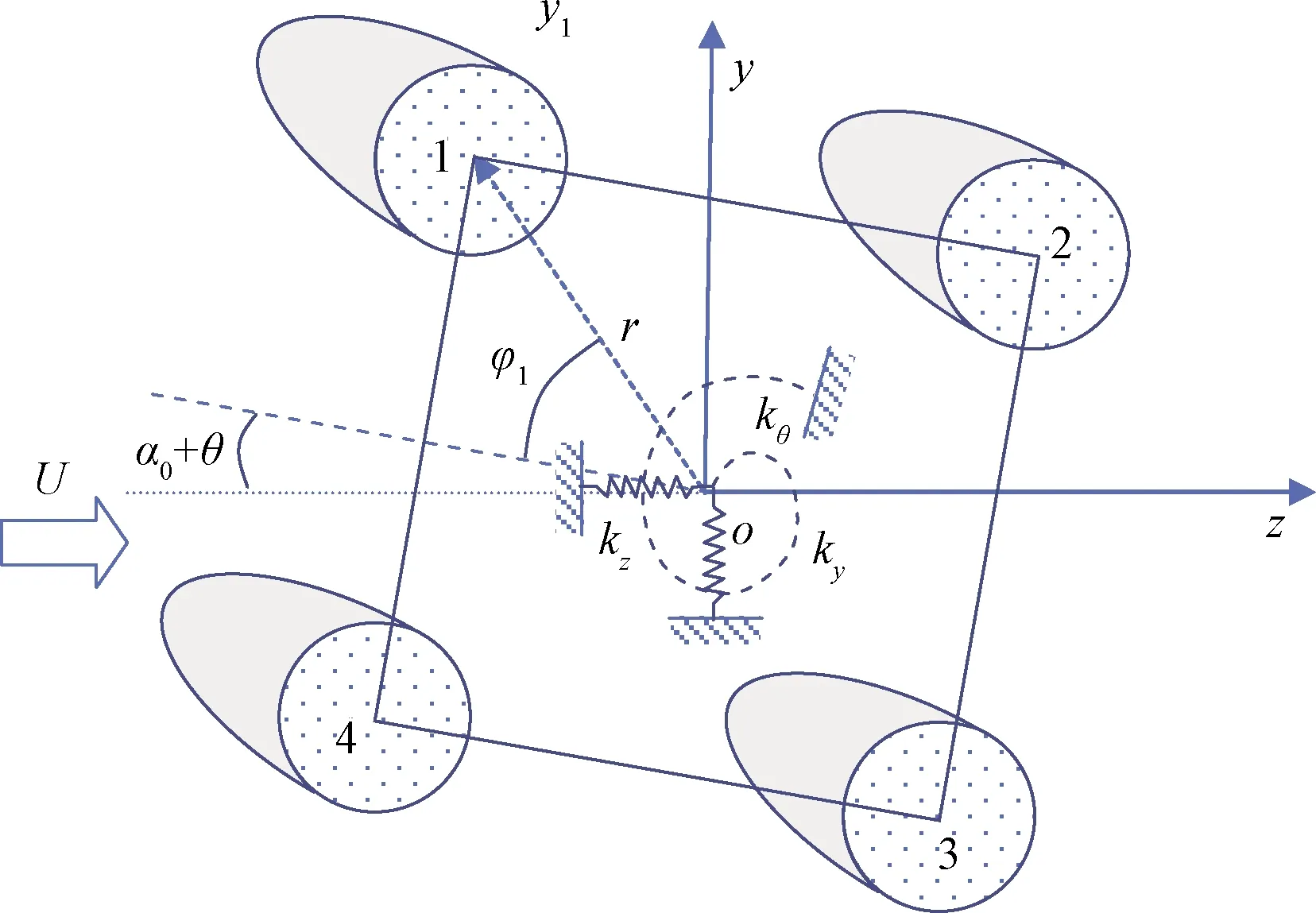
1、2、3、4分别为覆冰四分裂导线各子导线的编号;U为风速;α0为初始凝冰角;θ为扭转角;r为各子导线到转动中心的距离;kθ、ky、kz分别为扭转方向、y轴方向、z轴方向的扭转刚度
1.2 试验设备
试验由中国空气动力研究与发展中心低速空气动力研究所依据《大型试验质量管理要求》(GJB 1452—1992)在低速所1.4 m×1.4 m风洞进行。
试验需要用到两种型号的天平,即TG0151A天平、TG0151B的天平,该两种型号的天平用来测量分裂导线与单导线模型的阻力、升力。天平实体图像如图2所示。

图2 TG0151A
1.3 试验模型
四川西昌大风顶地区的自然条件极其满足试验目的,因此选择该地区作为试验模拟的地区。分裂导线模型型号选择4XLGJ-400/50,且每根子导线的型号与其他结构参数都完全相同导线模型如图3所示。试验安全系数选取2.5,导线最大使用应力与平均运行应力分别为105.9、66.2 MPa。分裂导线的直径均为27.6 mm,且分裂导线之间使用型号为FJZ-400的间隔棒将分裂导线衔接为一个整体,间隔棒的作用是使得相邻子导线间隔距离保持为450 mm,进而使得各子导线发生舞动时不会纠结缠绕在一起,保证试验安全进行。使用比例为1.2∶1的导线测力试验模型,其材料为硬铝,直径d与长度L分别为33、710 mm。

图3 导线模型
1.4 试验内容与数据处理
试验主要测试四分裂导线模型在不同风速U、不同攻角α下(攻角α变化范围为0°~360°)的气动力系数。图4为静态导线测力试验装置,使用该装置每间隔5°测试一次气动力系数,且该装置转动的方向为顺时针。

图4 静态导线测力试验装置
为了便于数据的整理,在静态空气动力特性试验过程中做出以下定义:四分裂导线各子导线的风向角均定义为逆气流方向与覆冰截面对称线之间的夹角,面向来流,逆时针转动为正。
覆冰四分裂导线静态空气动力特性试验测得的空气动力系数包括阻力系数CD和升力系数CL,且无量纲的空气动力参数定义如式(1)、式(2)所示[8]:
(1)
(2)
式中:FD、FL分别为导线所受的阻力、升力;ρ为空气密度;L为导线长度;d为导线直径。
1.5 覆冰厚度为12 mm的新月形四分裂导线的气动系数
按照以上试验步骤得到风速为18 m/s拟静态下覆冰四分裂导线各子导线的气动力升力系数曲线(图5)与气动力阻力系数曲线(图6)。

图5 风速18 m/s下覆冰四分裂导线各子导线升力系数对比
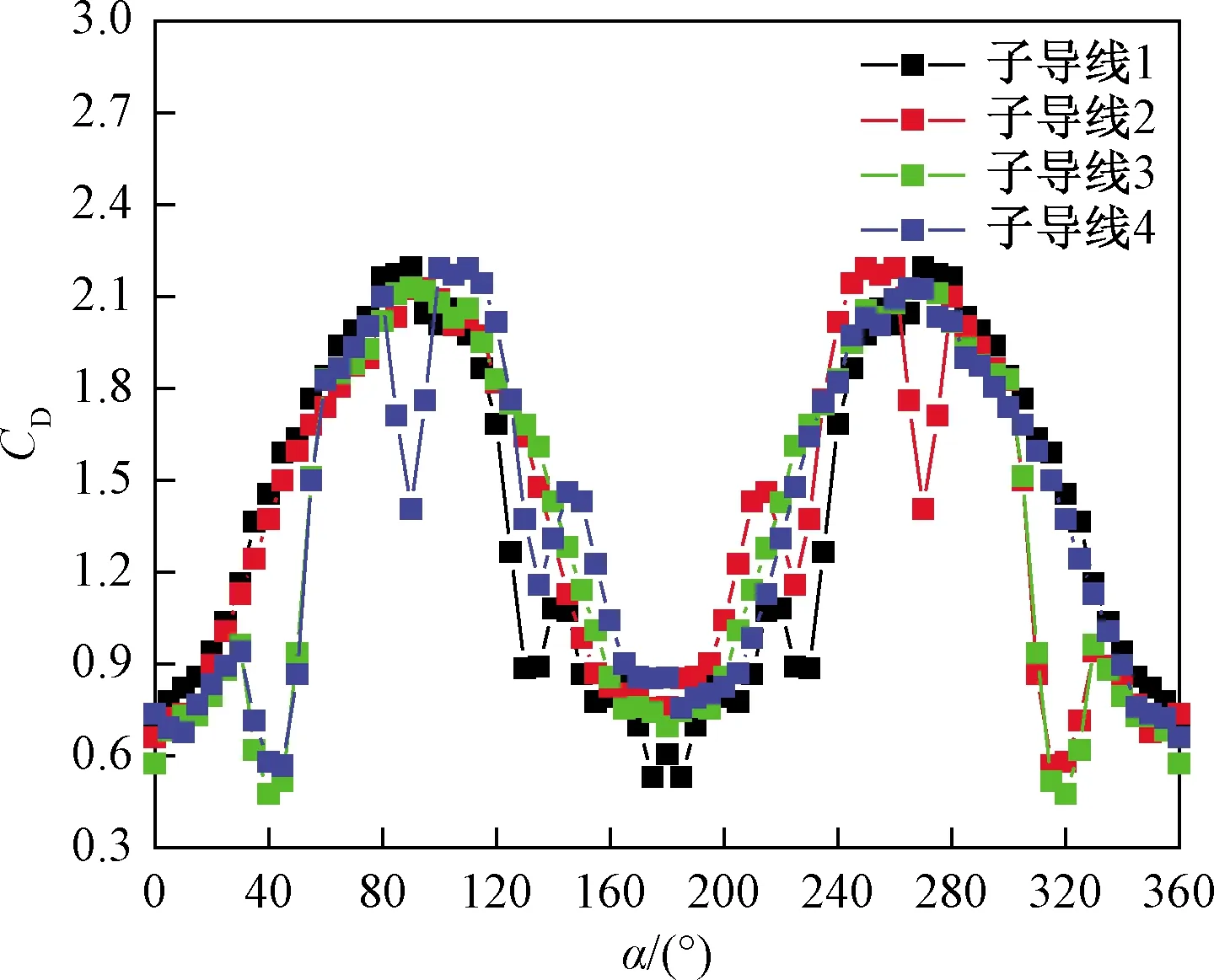
图6 风速18 m/s下覆冰四分裂导线各子导线阻力系数对比
观察图5、图6可知,各子导线的气动阻力系数曲线CD随着攻角α整体变化的规律具有两端低、中间凹的特点,有点类似盆地丘陵地貌。而各子导线的气动升力系数曲线CL随着攻角α整体变化的规律为由正到负的波状变化,当攻角α小于40°时气动升力系数曲线CL呈上升趋势,当攻角α处于40°~120°时气动升力系数曲线CL呈下降趋势,当攻角α处于120°~160°时气动升力系数曲线CL又有一段上升期,当攻角α处于120°~160°时CL呈下降趋势,比攻角α处于40°~120°时更加明显,攻角α处于后180°时的CL和攻角α处于前180°时的CL镜像对称。
当保持攻角α的度数不变时,各子导线的气动阻力系数曲线CD随平均风速U增加而减小,但因为各子导线所处位置的不同而具有不同的尾流效应,各子导线的气动阻力系数曲线CD发生突降的位置也不同。子导线1的气动阻力系数CD在攻角为135°附近受到子导线2的尾流影响骤降。子导线3的气动阻力系数CD在攻角45°附近受到子导线2尾流影响发生骤降。子导线4的气动阻力系数CD在45°、90°、135°左右分别受到子导线1、子导线2、子导线3的尾流效应影响骤降。
2 覆冰四分裂导线的气动力特性
2.1 覆冰四分裂导线的等效气动力系数
由1节新月形覆冰四分裂导线的气动特性分析得知:各子导线所处位置的不同会使得其自身受到不同的尾流效应,进而导致各子导线的气动特性并不能准确反映覆冰四分裂导线整体的气动力特性。覆冰四分裂导线的舞动通常表现为整体的舞动,因此可将覆冰四分裂导线各子导线的气动力系数等效到其中心轴上,进而在研究覆冰四分裂导线的舞动特性。为了得到等效覆冰四分裂导线气动力系数变化规律,对覆冰四分裂导线的等效气动升力系数和等效气动阻力系数的定义如式(3)、式(4)所示[8]:
(3)
(4)
将图5、图6中的气动系数分别按式(3)、式(4)的定义整理,得到覆冰四分裂导线等效气动系数如图7、图8所示。

图7 覆冰四分裂导线在风速为18 m/s下的等效升力系数

图8 覆冰四分裂导线在风速为18 m/s下的等效阻力系数
观察图7、图8可知,覆冰四分裂导线等效气动力系数曲线与各子导线气动力系数曲线的整体规律几乎相同,将图7、图8与图5、图6作对比,发现两者多出细节存在差异,因为这些细节差异可能造成舞动效果的差异。
2.2 驰振稳定性分析
根据Den-Hartog驰振原理[16],覆冰四分裂导线驰振稳定性可以根据式(5)来判定。
(5)
式(5)中:DDen为Den-Hartog系数,若DDen小于零则覆冰四分裂导线可能发生舞动,可以看出影响Den-Hartog系数的气动系数为气动阻力系数CD与气动升力系数CL。
将图7所示的气动升力系数曲线CL取一阶导数,并与图8的气动阻力系数曲线CD相加得到Den-Hartog系数曲线,如图9所示。
图9 覆冰四分裂导线在风速18 m/s下的等效Den-Hartog系数
因为当攻角α处于后180°的Den-Hartog系数曲线与当攻角α处于前180°的Den-Hartog系数曲线几乎对称,因此只考虑前180°的气动特性。观察图9可知,在攻角α处于40°~60°及攻角α处于150°~180°可能产生舞动。
2.3 单档覆冰四分裂导线控制方程推导
建立如图10所示的单档覆冰导线振动力学模型,导线两端用固定铰链约束,Г1为在自重作用下的平衡形状,Г2为在其他外部载荷作用下的导线形状。为了给出导线的动力学方程,建立笛卡尔坐标系。选取左端悬挂点为坐标原点,x轴沿着两悬挂点的连线方向,y轴竖直向下,然后根据x轴与y轴确定垂直平面向里的z轴方向。

x表示x轴方向的静态位移;u1表示x轴方向的动态位移;y表示y轴方向的静态位移;u2表示y轴方向的动态位移;z表示z轴方向的静态位移;u3表示z轴方向的动态位移
为了建立单档覆冰导线的自由振动力学模型,在重力作用下导线的平衡构型上选取长度为ds的微元,在其他外部载荷作用下导线形状发生改变,则相应的微元长度变为dsm,该位置处导线轴向应变ε为

(6)
由哈密顿变分原理可得:
(7)
式(7)中:δkv为覆冰导线的动能;δ∏为覆冰导线的势能;δw′为覆冰导线保守力做功之和。
针对单档导线,式(7)中各项分别表示为
(8)

(9)
式中:m为单位长度覆冰导线的质量;H为覆冰导线上的张拉力;EA为覆冰导线材料的抗拉刚度;l为导线跨径。联立式(7)~式(9)并考虑覆冰导线所受重力,材料的黏性阻力及外部激励力可得:

(10)

(11)
(12)
式中:fx、fy、fz分别为覆冰导线x、y、z轴方向的阻尼系数;Fx、Fy、Fz分别为x、y、z轴方向的气动力。
将动张力进行等效处理,然后采取Galerkin方法离散方程。沿长度范围计算平均应变为

(13)
并将式(13)代入式(11)和式(12),并忽略导线轴向惯性力可得
(14)
因为覆冰导线的振动主要受基本模态的影响,因此应用一阶模态截断法,可将u2、u3表示为
(15)
式(15)中:ψ2(x)、ψ3(x)表示模态函数;q2(t)、q3(t)表示振动函数。
将式(15)代入式(14)可得:

(16)

(17)
式中:“·”表示对t求导;“′”表示对x求导。
将式(16)两边同时乘以ψ2并对全长积分可得到覆冰导线y轴方向的振动控制方程为
(18)
式(18)中:
(17)
将式(17)两边同时乘以ψ3并对全长积分可得到覆冰导线z轴方向的振动控制方程为

(20)
式(20)中:
(21)
2.4 单档覆冰四分裂导线舞动特性分析
结合图9的Den-Hartog系数曲线,判断可能发生舞动的位置,经过观察后选取攻角α为55°、180°这两点来研究覆冰四分裂导线的舞动特性。
建立气动载荷分析数学模型图11所示,选取新月形覆冰导线为研究对象,假设真实风速沿着水平方向,由于在竖直方向此时有初始扰动使得导线在y方向有初始速度,相对风速发生了改变,因而与真实风速之间存在夹角,需要注意的是,这个夹角会不断变化,因为相对风速的方向及大小也随着不断变化。
忽略x方向的气动载荷,覆冰四分裂导线受到两个方向的气动升力:Fy为y方向上的气动力载荷,Fz为z方向上的气动力载荷。根据空气动力学结论有:
(22)
(23)
式中:Cy(α)、Cz(α)为拟合后的气动力系数;D为迎风直径;α为攻角;ρ为空气密度;U为平均风速。
将Cy(α)在α=0处进行泰勒展开,并省略4阶与4阶以上的高阶小量,则:

Ο(α4)
(24)
式(24)右边各项可分别表示为
(Cy|α=0)=CLcosα+CDsinα=
(CL|α=0)
(25)
(26)
(27)
(28)
由于常数项是一个定常量,只有静力效益,并不影响覆冰四分裂导线的振动,忽略常数项并将式(25)~式(27)代入式(24)可得:

(29)
式(29)中:Ο(α4)表示与α有关的高阶小量。
同理可得到z轴方向的气动力系数表达式为

Ο(α4)
(30)
令式(24)中的攻角α的一次项系数为χ1,二次项系数为χ2,三次向系数为χ3,即
(31)
则Cy(α)可以表示为
Cy=χ1α+χ2α2+χ3α3
(32)
同理Cz(α)可以表示为
Cz=γ1α+γ2α2+γ3α3
(33)
将图7、图8的气动力曲线分别求一阶、二阶、三阶导数,然后将得到的导数代入式(25)~式(27)并结合式(24)可得知当攻角α处于55°时,有:
Cy=-0.960 60α-1.407 16α2+
97.623 15α3
(34)
Cz=2.397 95α-7.008 26α2-
119.956 12α3
(35)
同理可得到攻角α处于180°时,有:
Cy=-1.863 64α+11.044 65α2+
144.171 26α3
(36)
Cz=0.498 98α+7.802 58α2-
39.215 99α3
(37)
将表1中导线的物理参数代入振动控制方程的系数表达式中,并选取模态函数ψ2(x)=sin(πx/l),ψ3(x)=sin(πx/l),导线长度l=300 m,最后结合式(34)、式(35)、式(20)与式(21)并利用MATLAB四阶Runge-Kutta函数,得到覆冰四分裂导线在攻角α为55°的舞动位移曲线,如图12所示。

表1 导线的物理参数
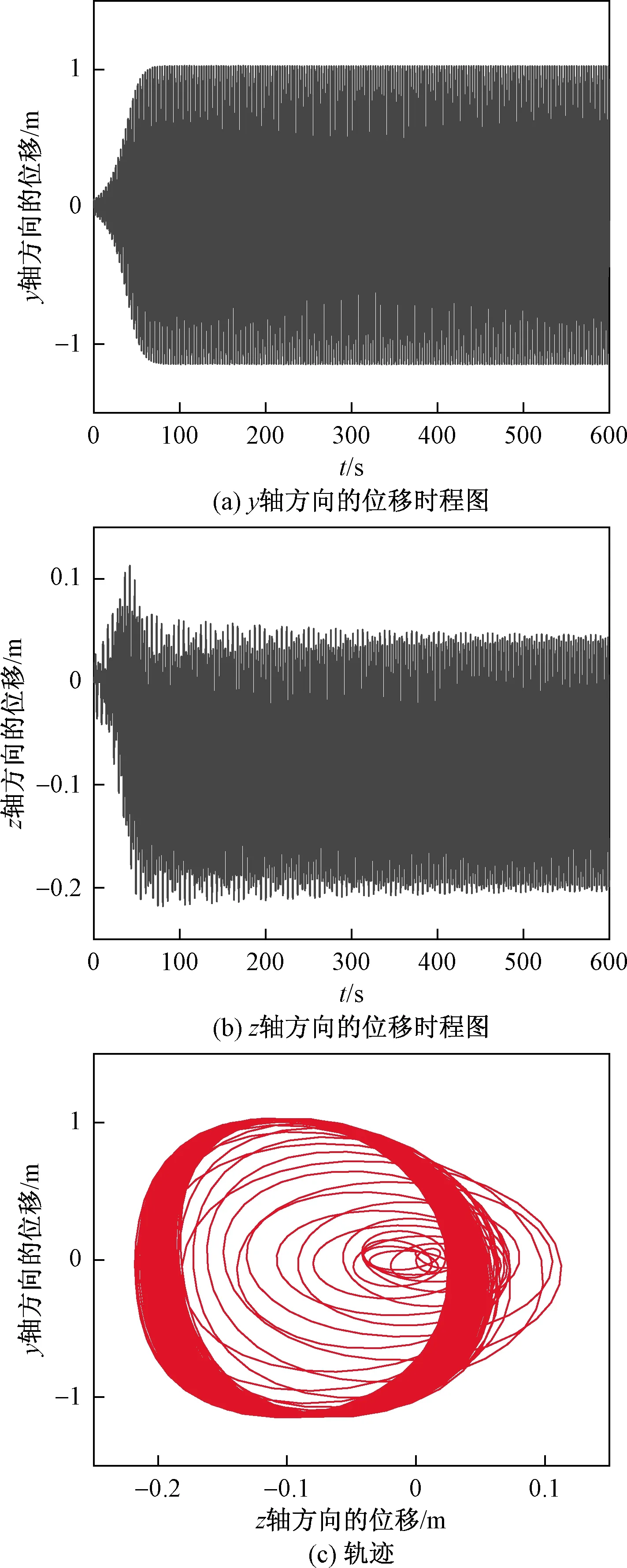
图12 攻角α为55°时的舞动时程图
结合式(34)、式(35)、式(18)与式(19),并利用MATLAB四阶Runge-Kutta方法,得到覆冰四分裂导线在攻角为180°的舞动位移曲线,如图13所示。
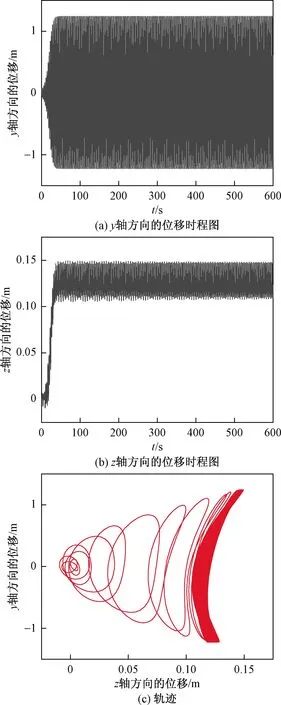
图13 攻角α为180°时的舞动时程图
观察图12、图13可知,攻角α处于55°和攻角α处于180°这两种情况下z轴方向的振幅都远远小于y轴方向的振幅。分裂导线z轴方向与y轴方向达到稳定振幅值的时间相差不大,大约都在50 s时达到了稳定值,且达到稳定后周期将保持不变。从点的运动轨迹可得知刚开始振动时z轴方向的振幅较大,随着时间的增加,y轴方向的位移不断增加,振动的最后y轴方向的位移将远远大于z轴方向的位移。这是由于刚开始分裂导线受到水平方向的风作用,在风的推动下z轴方向开始产生位移,当z轴方向开始产生位移后,由于y轴方向受到负斜率的空气动力的影响也将慢慢开始舞动,因此点的位移表现为前半段以z轴位移为主,后半段以y轴位移为主。
3 结论
覆冰四分裂导线各子导线尽管材料相同,但由于尾流效益的存在各子导线的气动系数有着明显的区别,因此考虑某一根子导线的舞动特性并不能反映四分裂导线整体的舞动特性。导线舞动后z轴方向的振幅远远小于y轴方向的振幅,达到稳定后周期将保持不变。振动开始导线主要表现为z轴方向的振动,随着时间的增加,y轴方向的振幅逐渐增加,稳定时y轴方向的位移远大于z轴方向的位移。
猜你喜欢
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
宇航总体技术(2019年5期)2019-10-11
金桥(2018年12期)2019-01-29
学苑创造·A版(2018年9期)2018-10-22
火力与指挥控制(2017年11期)2017-12-19
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年11期)2017-04-23
Coco薇(2016年8期)2016-10-09