基于自适应BM3D的侧扫声纳图像散斑降噪
2020-08-27 14:05:48蔡烜伟赵冬冬梁荣华郭新新
光电工程 2020年7期
陈 朋,蔡烜伟,赵冬冬*,梁荣华,郭新新
基于自适应BM3D的侧扫声纳图像散斑降噪
陈 朋1,蔡烜伟2,赵冬冬1*,梁荣华1,郭新新3
1浙江工业大学计算机科学与技术学院,浙江 杭州 310023;2浙江工业大学信息工程学院,浙江 杭州 310023;3中国科学院深海科学与工程研究所,海南 三亚 572000
侧扫声纳(SSS)是一种利用声波的水下传播特性完成水下探测的电子设备。因为侧扫声纳利用回波强度成像,所以不可避免地引入散斑噪声。本文针对散斑噪声,提出了基于自适应三维块匹配滤波(BM3D)的侧扫声纳图像散斑降噪方法。该算法首先对SSS图像进行幂变换和对数变换,采用小波变换估计整体图像噪声,同时用局部噪声估计结果更新BM3D算法的参数。然后本文算法比较全局估计和局部估计的结果,选择最合适的参数解决噪声分布不均匀的问题。实验结果表明,本文改进的BM3D算法能有效地降低SSS图像中的散斑噪声,获得良好的视觉效果。本文算法的等效视数至少提高了6.83%,散斑抑制指数低于传统方法,散斑抑制和平均保存指数至少减少了3.30%。该方法主要用于声纳图像降噪,对于超声、雷达或OCT图像等受散斑噪声污染的信号也有一定的实用价值。
侧扫声纳;散斑噪声;图像降噪;BM3D
1 引 言
侧扫声纳(Side-scan soanr, SSS)在水下救援、海洋研究和水雷排查中起到了重要的作用。侧扫声纳发射超声波频率通常在100 kHz到2 MHz,部分能量会被海底地形以及海底各种物体反射,再由换能器接收转换为相应电信号。换能器发出的声波为沿着拖鱼移动方向窄、垂直方向宽的扇形,因此一次扫描的范围为垂直于拖鱼移动方向的海底狭长地带。在拖鱼被拖拽过程中,侧扫声纳收集每一帧数据,按顺序沿垂直轨迹显示,生成侧扫声纳图像,是侧扫声纳成像的基本原理[1]。
然而SSS图像受尾流、混响及仪器自身等因素影响,导致图像存在噪声干扰和畸变。侧扫声纳图像可分为目标高亮区、阴影区和海底混响区三类,海底环境复杂,造成声纳图像有各种噪声,如高斯噪声、脉冲噪声和散斑噪声,其中最突出的是散斑噪声[2]。乘性散斑噪声表现为声纳图像中较亮和较暗像素的随机颗粒,会导致图像细节的缺失,降低对比度,使物体形变,边缘模糊,严重影响侧扫声纳图像的图像匹配、目标识别和特征提取等图像的处理和应用。侧扫声纳图像去噪的目标在于去除散斑噪声,同时尽可能保留纹理、边缘和其他细节[3]。
声纳图像降噪的传统方法一般是Lee滤波器[4]、Kuan滤波器[5]、Frost滤波器[6]、中值滤波和均值滤波。传统空域算法通过调节滤波窗口大小来实现滤波,理论上在均匀区域可以达到较好的滤波效果,但是在非均匀区域会模糊边界,不能很好地保持边缘,对于纹理信息和边缘信息丰富的侧扫声纳图像来说会丢失很多有效信息。因此,为保持边缘信息,在去噪算法中引入了非局部的思想。Antoni等[7]提出非局部平均算法(non-local means denoising, NLM)滤波,Wang等[8]提出快速非局部平均算法(fast non-local algorithm for image denoising, NLF),均在去噪保边中有出色的表现。在频域上去噪方法有小波阈值去噪法。李世文[9]提出了基于波原子阈值去噪算法去除散斑噪声并能很好地保持图像边缘细节特征;王帆[10]提出基于字典算法的散斑降噪方法,在光学相干断层扫描(optical coherence tomography, OCT)图像的散斑降噪中也取得了很好的效果。
块匹配三维滤波(Block-matching and 3D filtering, BM3D)是一种非局部均值方法,基于NLM思想发展而来,结合了空间域和变换域的光学图像去噪方法[11]。BM3D方法的优点是能充分利用声纳图像自身的结构相关性和冗余性,经过三维变换得到的图像稀疏表示能更好地描述声纳图像的特性,对噪声和边缘的区分效果更加明显。
同时BM3D算法也存在着一些缺点。BM3D算法基于高斯加性噪声开发,对不同于高斯模型的幂律噪声处理效果不好[12]。BM3D算法中的块匹配和三维变换部分十分耗时,计算复杂度高[13]。
部分研究者对BM3D进行改进并在不同的领域中使用。Dabov等[14]提出基于主成分分析(principal component analysis,PCA)的形状自适应算法,可以较好地保护边缘。Zhong等[15]提出了一种基于非局部集中先验信息改进的BM3D算法。Devapal等[3]提出使用曼哈顿距离改进分组方法,曲波变换代替小波变换提高精度,使用无迹卡尔曼滤波代替维纳滤波的算法(curvelet-ISUKF-Manhattan BM3D, CIM-BM3D),该BM3D算法适用于合成孔径雷达图像,并且得到了较好的去噪效果。Zhao等[16]提出BM3D算法中的维纳滤波部分通过数据统计改进,应用于医疗中的CT图像去噪,在低剂量X光情况下得到的图像去噪效果中有明显提高。Cheng等[17]提出基于曼哈顿距离的自适应BM3D算法(Manhattan distance based adaptive BM3D, MD-ABM3D),用于激光散斑对比度成像(LSCI),大大减少了LSCI得到清晰图像的时间。
然而针对声纳图像的BM3D去噪方法的研究比较少。范习健等[18]提到通过将瑞利分布的散斑噪声转化为正态分布的高斯噪声再通过自适应BM3D处理,从而达到提高BM3D对声纳图像的去噪效果。
本文针对目前没有先进的BM3D算法适用于侧扫声纳图像的问题,提出了基于自适应BM3D的侧扫声纳图像散斑降噪方法。该算法对侧扫声纳图像进行幂变换和对数变换,把瑞利分布的散斑噪声转化为正态分布的高斯噪声,每一个区域参数估计对比全局参数实现更细致的参数自适应。
2 算法总体设计
BM3D算法[19]采用非局部均值NLM方法的非局部块匹配的思想,在此基础上,它把图像相似块堆叠成三维图像,并且使用了变换域方法。该算法分基本估计和最终估计两个过程,基本估计的协同滤波使用硬阈值滤波去除大量噪声,在最终估计协同滤波中使用维纳滤波进一步压制噪声同时恢复边缘纹理。BM3D算法在高斯噪声去噪中有很好的效果,并被广泛应用。
本文在该算法的基础上,对图像进行幂变换和对数变换实现噪声的性质变化,更加符合BM3D去噪条件;同时借助小波噪声估计方法估计全局噪声作为去噪参数;在相似块匹配部分使用曼哈顿距离代替欧几里德距离,在相同范围内找到更多相似区域;最后在协同滤波过程中,对每一个匹配块进行噪声估计和全局噪声估计对比,实现对每一个区域的BM3D去噪参数自适应。
图1为本文的算法流程图,该算法主要分为四个部分。第一步,图像预处理部分,包括高斯函数幂域变换和对数变换;第二步,BM3D算法的基本估计,其中添加了对输入图像的每个图像块的噪声,估计达到硬阈值滤波的阈值自适应;第三步,BM3D算法的最终估计过程,其中添加了基本估计的图像块与原始图像的对比,达到维纳滤波参数的自适应;第四步,对最终估计的图像进行预处理的逆变换,实现图像的恢复。
2.1 图像预处理
如引言中所提到,声纳系统的原理是靠换能器发射超声波,经过海底反射,接收器接收的回波成像。因为声纳系统所成的图像被乘性的散斑噪声严重污染,而BM3D算法本质上是基于高斯噪声开发的,对高斯噪声的去噪效果好,所以本文需要通过建立噪声模型,经过幂变换和对数变换把乘性的非正态分布的噪声转化为加性的正态分布的高斯噪声,再进行下一步去噪操作。
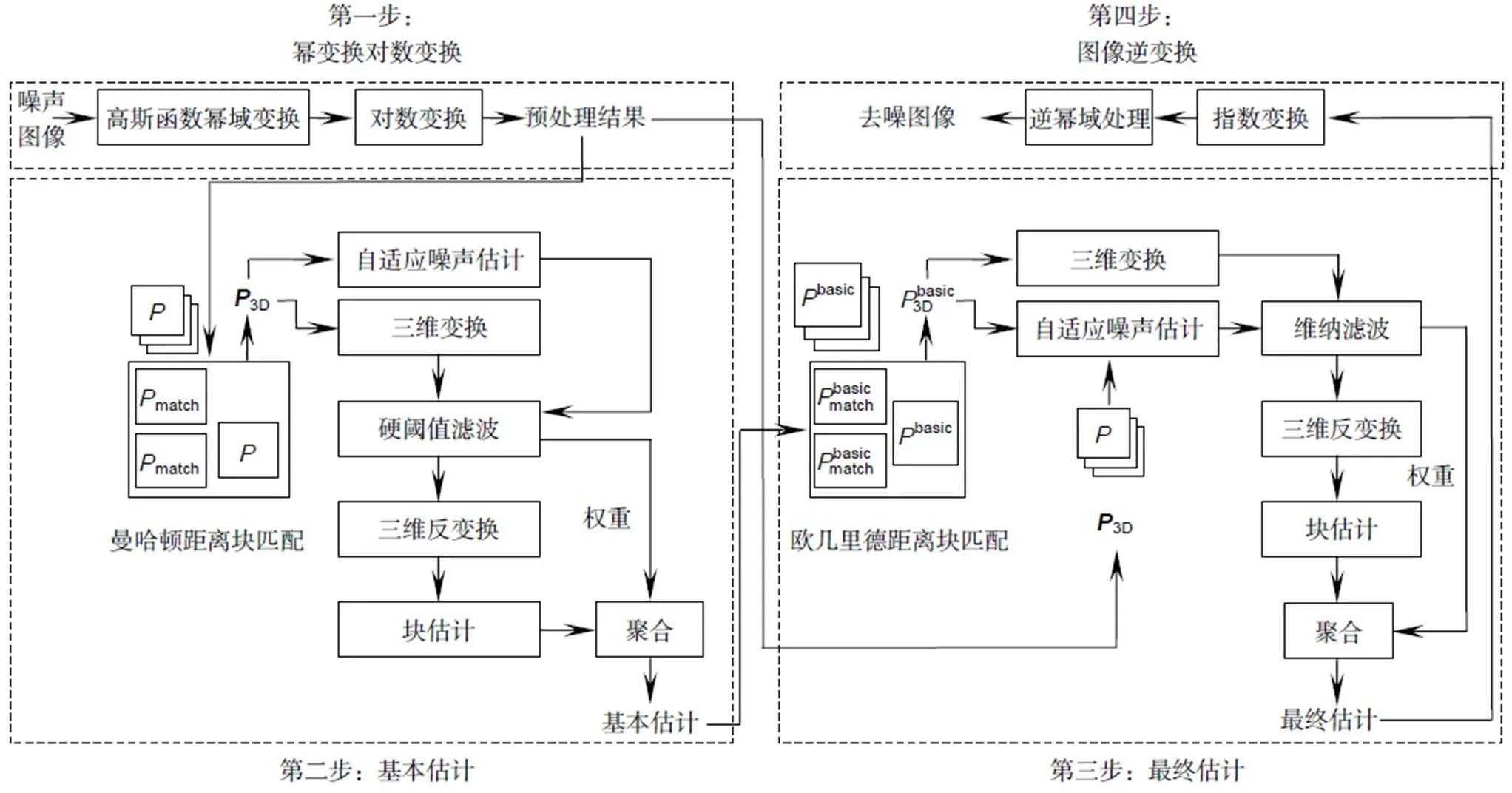
图1 算法流程图
侧扫声纳图像的散斑噪声与SAR图像以及医学超声图像相似,其噪声模型可以描述为
其中:为被噪声污染的图像,为真实图像,为服从瑞利分布的散斑噪声。
首先本文算法需要把侧扫声纳图像的散斑噪声分布从瑞利分布转化为近高斯分布,其公式为
其中:为变换后的图像,为转换前的图像,为转化系数。范习健等[18]通过实验得到,当约为0.35时,通过该公式可以把瑞利分布的噪声转化为正态分布的,本文算法取为0.35。
图像中的噪声从瑞利分布转化为近高斯分布,本文算法对SSS图像进行对数变化,使噪声从乘性转换为加性。结合式(1)、式(2),得到如下公式:


其中:为含噪图像的任意一个像素的灰度值。
所以最终转换之后进行归一化得到的ln为
2.2 基本估计
图像大部分噪声已经转化为高斯加性噪声的同时,因为侧扫声纳图像噪声复杂,有一部分均匀噪声同时也被转化为非均匀噪声。原始BM3D使用欧几里德距离进行块匹配,在偏差的二次求和中增大了较大的偏差。而曼哈顿距离以相同的权重对偏差进行求和,不会扩大较大的偏差。为了应对这部分非均匀噪声,本文算法在寻找匹配块的时候使用曼哈顿距离来替代原先的欧几里德距离。理论上曼哈顿距离在处理非均匀噪声时优于欧几里德距离。


然后将set与一起放到三维矩阵中,用3D表示,接下来要进行协同滤波。首先对3D进行三维线性变换,先进行二维线性变换,再进行一维线性变换,然后在变换域中进行硬阈值滤波,之后再依次逆变换得到经过处理的三维矩阵3D:


三维变换后,在变换域对该三维矩阵进行硬值域滤波:

通过协同滤波,可以得到三维块中每一个二维图像块的估计,对于,每个像素的估计都是相似图像块的估计通过加权来累计的:

当遍历完全部图像块之后,输出基本估计为
2.3 最终估计
基本估计的目的在于通过多帧平均的方式滤除大量噪声,而最终估计是结合原图恢复除噪声外的细节部分。最终估计是在基本估计的基础上,结合基本估计前的声纳图像通过维纳协同滤波恢复图像细节。
最终估计的过程与基本估计的过程基本一致,如图1所示。其中不同的地方有以下几点:
2) 下一步为维纳滤波,和经典算法一致,公式为

2.4 去噪图像还原
因为第一部分,本文对原图进行了对数变换和幂变换,不光改变了噪声的性质,也同样改变了真实图像的性质。所以根据同态滤波的要求,本文需要通过幂逆变换和指数变换,把去除噪声的图像恢复到原来的状态。
结合式(4),可以得到此时的模型为

经过指数变换和幂逆变换,图像的像素灰度值均发生了变化,所以需要归一化。本节最终需要求解作为本算法的最终去噪结果:
所以最终转换之后进行归一化得到的ln为

3 实验结果与分析
为了验证本文提出算法的优越性,选择了真实的侧扫声纳图像进行主观和客观指标的评价。主观上,通过视觉检查一些可视特点,包括边缘保持能力、模糊程度、点目标保持以及客观上难以被察觉的细节等等;客观上,视觉评估可以通过公认的图像评价手段,包括全参考图像质量指标,半参考图像质量指标和无参考评价指标[20]。
3.1 无参考图像质量评价指标
因为真实的侧扫声纳图像是没有参考图像比较的,所以本文采用了三种无参考图像质量评价指标来验证本文算法,其中包括等效视数(equivalent number of looks,ENL,用ENL表示)、散斑抑制指数(speckle suppression index,SSI,用SSI表示)和散斑抑制和均值保持指数(speckle suppression and mean preservation index, SMPI,用SMPI表示)[20]。
1) 等效视数(ENL)
2) 散斑抑制指数(SSI)
3) 散斑抑制和平均保存指数(SMPI)
3.2 实验设计
本文选择的真实侧扫声纳图像位于英吉利海峡中部,位于怀特岛的圣凯瑟琳角和法国北部科廷半岛的巴弗勒角之间怀特岛巴富勒礁中。
该地带侧扫声纳数据于2013年由英国政府主持获取Wight-Barfleur Reef SCI海床数据,以更好地划定区域内(基岩和石质)的范围,用于协助制定与保护区域和特征有关的管理建议,以jsf文件格式存储并公开于英国政府公开数据网。
本文使用EdgeTech公司公开的上位机读取其文件,并显示和截图用于本文的实验验证。其中,声纳频率以较低频率发射声波218.7 kHz~241.7 kHz获取声纳图像。
本文对100张存在明显目标的分辨率为320´320的声纳图像进行两组实验。
第一组实验中,本文用基于欧几里德距离匹配的本文算法和基于曼哈顿距离匹配的本文算法在同参数的情况下对同一张声纳图像进行去噪实验,比较评价指标,验证使用曼哈顿距离寻找匹配块优于使用欧几里德距离。
第二组实验中,本文分别用传统算法的中值滤波、原始BM3D算法、Fan等[18]的BM3D算法、MD-ABM3D和本文算法对每张声纳图像进行去噪实验,比较评价指标,验证本文算法去噪效果优于传统算法和一些改进BM3D算法。
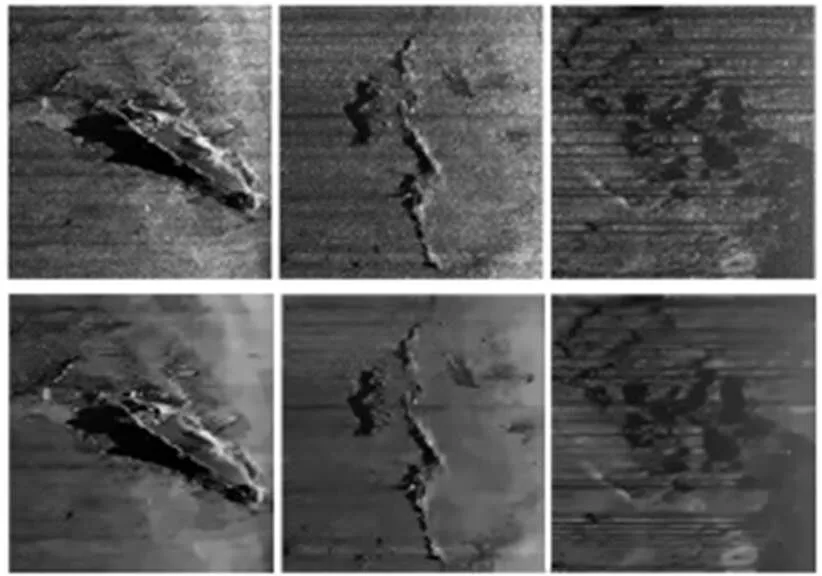
本节随机抽取其中3张实验图像如图2所示。图2(a)疑似沉船,图2(b)为海底凸起,图2(c)则为海底石块群或者坑洞聚集,原图均呈现出或明或暗的斑点分布的噪声,对基于这些侧扫声纳图像的水底底质和目标识别等的水下研究造成了不便。
3.3 块匹配方法对比实验
本节对这三幅原图分别进行使用欧几里德距离块匹配的本文算法和使用曼哈顿距离块匹配的本文算法去噪,效果图如图3所示。
原始BM3D算法使用欧几里德距离进行块匹配,在偏差的二次求和中放大了较大的偏差;本文算法使用曼哈顿距离进行块匹配,以相同的权重进行求和,不会放大偏差,在算法工程中体现为算法可以在有非均匀噪声的情况下找到更多的相似图像块用于相似块的多帧平均。
图3为使用曼哈顿距离和欧几里德距离的对照实验的图像去噪结果。
从图3可以看到,本文使用曼哈顿距离和欧几里德距离都得到了理想的去噪效果,也有较好的保边能力。滤波结果质量评价如表1所示,其中粗体的数值为最优值。等效视数(ENL)越大表示平滑效率越高,散斑抑制指数(SSI)越小,说明散斑滤波性能越好;散斑抑制和平均保存指数(SMPI)数值越低,说明该滤波器的平均保存性和降噪性能越好。块匹配使用曼哈顿距离相比欧几里德距离,ENL平均提高了0.95%,SSI平均降低了0.19%,SMPI平均降低了0.25%。这结果证明了本文算法使用曼哈顿距离进行块匹配很好地处理了算法第一步遗留下的少量非均匀噪声。
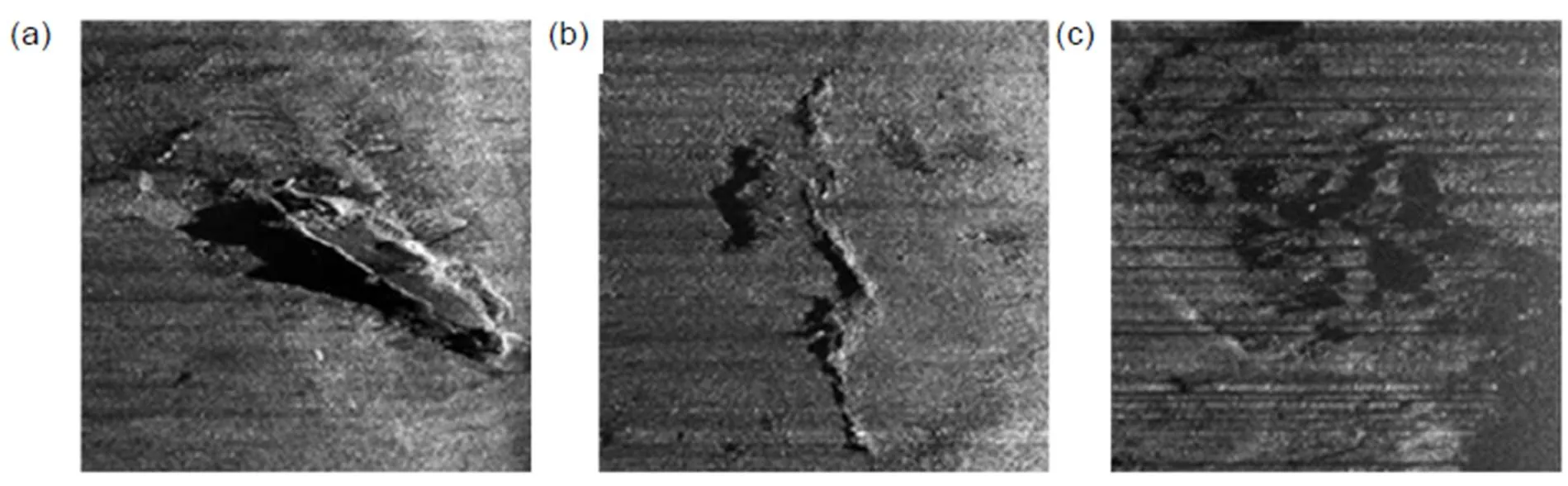
图2 实验原图。(a) 疑似船体图;(b) 海底凸起图;(c) 海底起伏地貌图
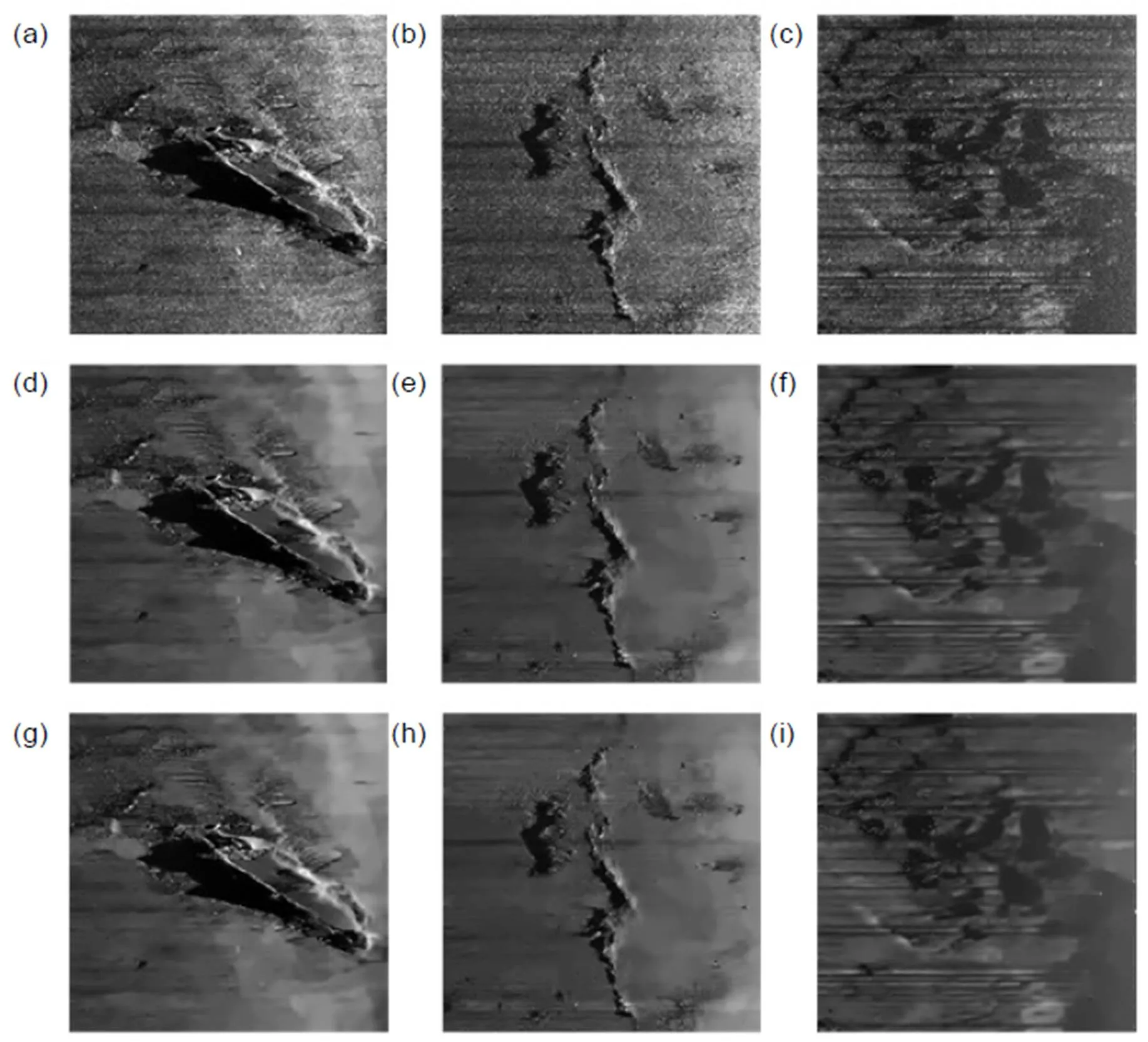
图3 算法处理结果图。(a)~(c) 原图;(d)~(f) 欧几里德距离用于匹配;(g)~(i) 曼哈顿距离用于匹配

表1 图像质量评价表
3.4 多算法降噪对比实验
对图2的三幅原图分别进行传统算法的中值滤波、NLM算法、原始BM3D算法、Fan等[18]的BM3D算法、MD-ABM3D和本文算法,效果图如图4所示。
主观感受上,图4(a)、4(g)、4(m)为中值滤波的滤波结果,虽然相对原图,不仅去除了大量噪声,还模糊了边缘,这对于后期目标识别带来了麻烦;图4(b)、4(h)、4(n)为NLM算法滤波结果,可以明显看到暗部分仍然存在或明或暗相间的斑点噪声,去除效果并不好。图4(c)、4(i)、4(o)为原始BM3D算法滤波结果,原始BM3D算法不含噪声估计的功能,所以在实验中为了公平起见,和其他自适应算法设置一样的噪声估计值进行试验,可以看到对大部分区域有涂抹痕迹,并且保留了大部分边缘,但是噪声最强烈的地方去噪效果不理想;图4(d)、4(j)、4(p)为Fan等人的BM3D算法得到的图像,对强烈噪声的抑制效果相对原始BM3D要高,平滑效果明显;图4(e)、4(k)、4(q)为MD-ABM3D滤波结果,表现效果类似于原始BM3D但是对噪声抑制的能力强于原始BM3D。图4(f)、4(l)、4(r)为本文算法结果,在视觉效果上也达到了抑制强烈噪声,平滑均匀区域的效果,并很好地保护了边缘和细节。
因为中值滤波得到的图像不仅模糊,而且仍然能看到或明或暗相间的斑点噪声,所以在之后的无参考图像质量评价中将不参加对比。
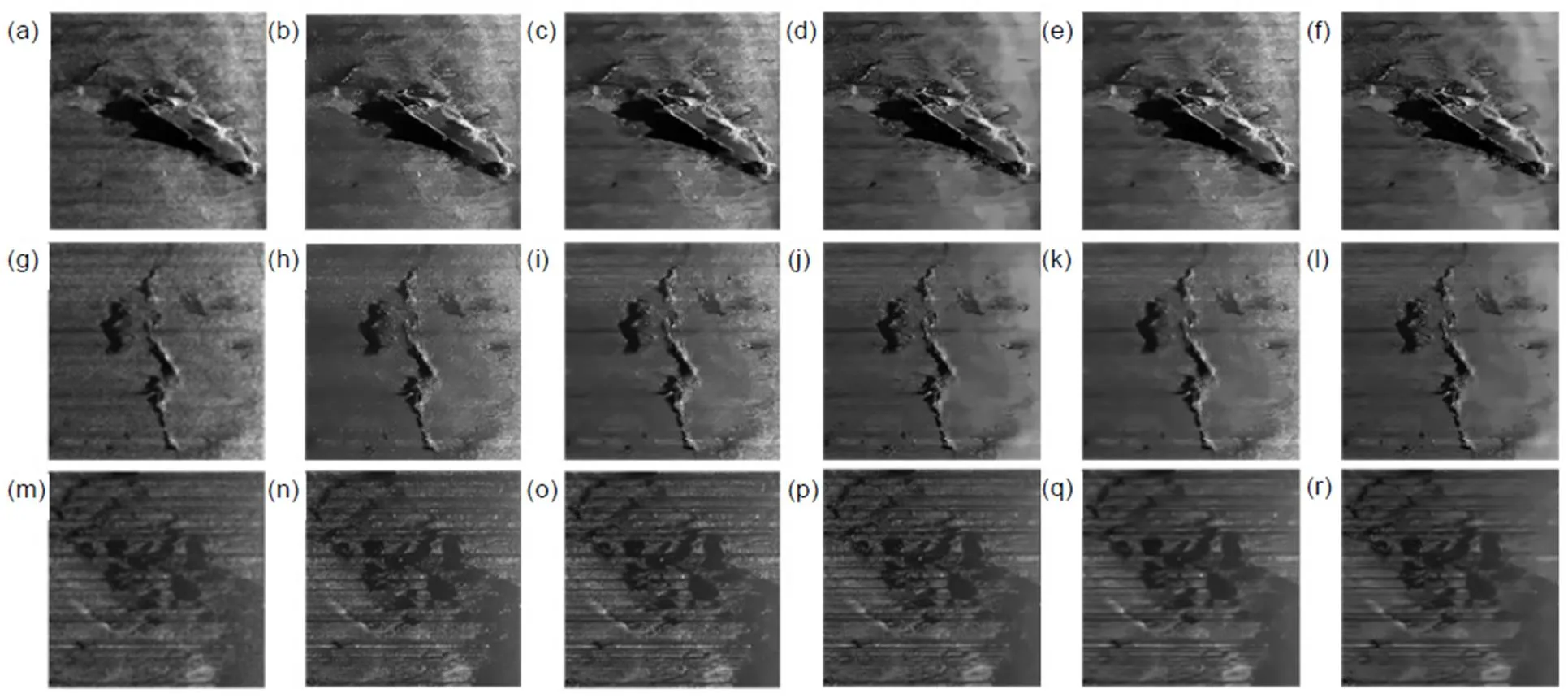
图4 实际侧扫声纳图像算法处理效果图。(a), (g), (m) 中值滤波;(b), (h), (n) NLM;(c), (i), (o)原始BM3D算法;(d), (j), (p) Fan等人[18];(e), (k), (q) MD-ABM3D算法;(f), (l), (r) 本文算法
表2为NLM算法、原始BM3D、Fan等人BM3D、MD-ABM3D和本文算法处理原图得到的图像的质量评价表。其中粗体的数值为最优值。等效视数(ENL)越大表示平滑效率越高,散斑抑制指数(SSI)越小,说明散斑滤波性能越好;散斑抑制和平均保存指数(SMPI)数值越低,说明该滤波器的平均保存性和降噪性能越好。
对比范习健等人用在声纳图像上的算法,本文算法实现了BM3D算法在寻找匹配块中使用曼哈顿距离找到更多相似图块,同时协同滤波实现针对每一个去噪区域的参数自适应。通过表2的ENL、SSI、SMPI指标可以得到,本文算法的评价指标均高出范习健的BM3D算法处理图像的评价指标,ENL平均高出约36.9%,SSI平均降低约6.046%,SMPI平均降低约9.86%。所以相对范习健的BM3D算法,本文算法优化自适应BM3D达到更好的平滑效果,散斑抑制能力和去噪保存细节的效果。
对比MD-ABM3D算法,本文算法实现了对图像的噪声近似高斯化。通过表2的ENL、SSI、SMPI指标可以得到,除了SSI参数两者基本近似,本文算法的其他评价指标均高出MD-ABM3D处理图像的评价指标,ENL平均高出约6.5%,SMPI平均降低约3.01%。所以相对MD-ABM3D算法,本文算法对含噪声图像进行预处理,变化噪声性质为近高斯加性噪声,虽然散斑抑制能力近似,但是有更好的平滑效果和去噪保存细节的能力。
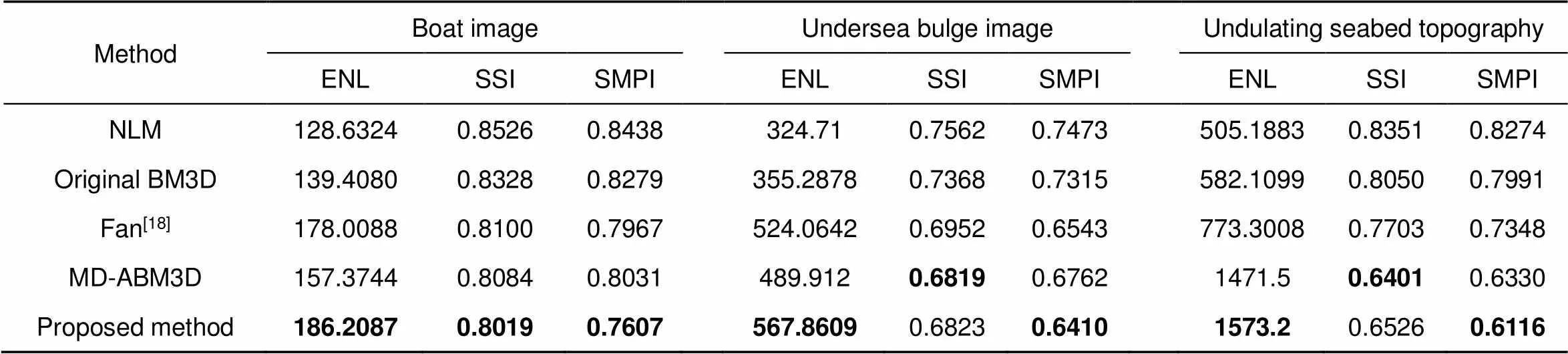
表2 各算法图像质量评价表
本文算法参考非线性系统滤波,通过幂变换和对数变换改变噪声性质使图像适用于线性系统滤波,经过改进的自适应BM3D滤波,最后通过幂逆变换和指数变换实现对去噪后的图像的恢复,相比于LNM的多帧平均方法(如表2所示),各项评价指标都得到很大的提高。现在的超声、雷达和OCT图像因为成像原理,往往都被严重的散斑噪声所污染,本文算法不仅适用于声纳图像,对于被同类型噪声污染的图像去噪方面,也有参考的价值。
4 结 论
针对侧扫声纳图像特性,本文提出一种基于自适应的BM3D的图像去噪算法。先通过幂变换函数将大部分非均匀分布的散斑噪声转化为近高斯白噪声,在相似块匹配时使用曼哈顿距离作为参考,实现对小部分非高斯噪声的适应,结合对每一图像块都进行噪声评估和参数自适应的BM3D算法滤波。对实际的侧扫声纳进行实验。实验结果表明,本文算法在噪声较强情况下在去噪和边缘保持两方面都取得了很好的结果。本文算法和其他BM3D算法比较得到,ENL平均至少提高了6.83%,SSI在数值上与MD-ABM3D十分相近,SMPI平均至少减少了3.30%。虽然该方法主要用于声纳图像降噪,但对于超声、雷达或OCT图像等受散斑噪声污染的信号也有一定的实用价值。
[1] Blondel P.[M]. Berlin: Springer, 2009: 1–6.
[2] Ye X F, Li P, Deng Y Y. A side scan sonar image denoising algorithm based on compound of fuzzy weighted average and Kalman filter[C]//, Chengdu, China, 2012: 720–724.
[3] Devapal D, Kumar S S, Sethunadh R. Discontinuity adaptive SAR image despeckling using curvelet-based BM3D technique[J]., 2019, 17(3): 1950016.
[4] Lee J S, Grunes M R, De Grandi G. Polarimetric SAR speckle filtering and its implication for classification[J]., 1999, 37(5): 2363–2373.
[5] Kuan D T, Sawchuk A A, Strand T C,. Adaptive noise smoothing filter for images with signal-dependent noise[J]., 1985, PAMI-7(2): 165–177.
[6] Frost V S, Stiles J A, Shanmugan K S,. A model for radar images and its application to adaptive digital filtering of multiplicative noise[J]., 2009, PAMI-4(2): 157–166.
[7] Buades A, Coll B, Morel J M. Non-local means denoising[J]., 2011, 1: 208–212.
[8] Wang J, Guo Y W, Ying Y T,. Fast non-local algorithm for image denoising[C]//, Atlanta, GA, USA, 2006: 1429–1432.
[9] Li S W, Zhang B, Liu Z M,. Noise reduction for OCT images based on wave-atom thresholding algorithm[J]., 2014, 41(7): 75–80.
李世文, 张彬, 刘泽民, 等. 基于波原子阈值算法的OCT图像降噪技术[J]. 光电工程, 2014, 41(7): 75–80.
[10] Wang F, Chen M H, Gao N J,. OCT image speckle sparse noise reduction based on dictionary algorithm[J]., 2019, 46(6): 180572.
王帆, 陈明惠, 高乃珺, 等. 基于字典算法的OCT图像散斑稀疏降噪[J]. 光电工程, 2019, 46(6): 180572.
[11] Lebrun M. An analysis and implementation of the BM3D image denoising method[J]., 2012, 2: 175–213.
[12] Gao J B, Chen Q, Blasch E. Image denoising in the presence of non-Gaussian, power-law noise[C]//(), Dayton, OH, USA, 2012: 103–108.
[13] Yang J Y, Zhang X, Yue H J,. IBM3D: integer BM3D for efficient image denoising[J]., 2019, 38(2): 750–763.
[14] Dabov K, Foi A, Katkovnik V,. BM3D image denoising with shape-adaptive principal component analysis[C]//(), Saint-Malo, France, 2009: 1–6.
[15] Zhong H, Ma K, Zhou Y. Modified BM3D algorithm for image denoising using nonlocal centralization prior[J]., 2015, 106: 342–347.
[16] Zhao T T, Hoffman J, McNitt‐Gray M,. Ultra‐low‐dose CT image denoising using modified BM3D scheme tailored to data statistics[J]., 2019, 46(1): 190–198.
[17] Cheng W M, Zhu X, Chen X,. Manhattan distance-based adaptive 3D transform-domain collaborative filtering for laser speckle imaging of blood flow[J]., 2019, 38(7): 1726–1735.
[18] Fan X J, Li Q W, Huang H,. Side-scan sonar image despeckling based on block-matching and 3D filtering[J]., 2012, 17(1): 68–74.
范习健, 李庆武, 黄河, 等. 侧扫声呐图像的3维块匹配降斑方法[J]. 中国图象图形学报, 2012, 17(1): 68–74.
[19] Dabov K, Foi A, Katkovnik V,. Image denoising by sparse 3-D transform-domain collaborative filtering[J]., 2007, 16(8): 2080–2095.
[20] James R, Supriya M H. Blind estimation of single look side scan sonar image from the observation model[J]., 2016, 93: 336–343.
[21] Zhang H K. Suppression of Noise in Digital Holography[D]. Harbin Engineering University, 2014.张洪科. 数字全息再现像中的噪声抑制[D]. 哈尔滨工程大学, 2014.
Despeckling for side-scan sonar images based on adaptive block-matching and 3D filtering
Chen Peng1, Cai Xuanwei2, Zhao Dongdong1*, Liang Ronghua1, Guo Xinxin3
1College of Computer Science & Technology, Zhejiang University of Technology, Hangzhou, Zhejiang 310023, China;2College of Information Engineering, Zhejiang University of Technology, Hangzhou, Zhejiang 310023, China;3Institute of Deep-sea Science and Engineering, Chinese Academy of Sciences, Sanya, Hainan 572000, China
An example of denoised result by improved BM3D algorithm
Overview:An understanding of the ocean and its changing environment is increasingly important. Scientific, economic, and political decision-making depends to some extent on this knowledge. However, even lasers can penetrate through only a few tens of meters in very clear water. Acoustic waves, by contrast, can travel over long distances without much attenuation. Therefore, all kinds of sonars play an important role in ocean research. Side-scan sonar (SSS) is an electronic device that utilizes the propagation characteristics of sound waves under water to complete underwater detection and communication tasks through electro-acoustic conversion and information processing. Because the SSS produces images and maps according to the intensity of acoustic echo, speckle noise will inevitably be involved due to the complex underwater environments. Block-matching and 3D filtering (BM3D) is an advanced denoising method based on the fact that an image has a locally sparse representation in transform domain. This sparsity is enhanced by grouping similar 2D image patches into 3D groups. This algorithm performs well in dealing images polluted by Gaussian additive noise. The BM3D algorithm was originally designed for Gaussian additive noise, therefore, it is not reasonable to denoise the side-scan sonar images polluted by speckle noise. In this paper, a speckle denoising method based on BM3D is proposed to filter the multiplicative speckle noise in side-scan sonar images. First, the SSS image is transformed by power and logarithm. The multi-scale two-dimensional discrete wavelet transform is used to estimate the general noisy level of the polluted image. Second, the parameters of the BM3D algorithm are updated according to the noise estimation results of each local patch. Third, after comparing the general noise estimation and the local noise estimation, the proposed algorithm chooses the best estimation to filter every patch separately to solve the problem that the noise is not evenly distributed. Finally, the image properties are recovered by exponential transformation and inverse power transformation. The experimental results show that the improved BM3D algorithm can effectively reduce the speckle noise in SSS images and obtain good visual effects. In this paper, three non-reference image quality evaluation parameters, namely the equivalent noiseof looks (ENL), speckle reduction index (SSI), speckle suppression and average preservation index (SMPI), are used to evaluate the noise reduction effect. Compared with two kinds of improved BM3D algorithms and a traditional algorithm, the ENL of the proposed algorithm is at least 6.83% higher than that of others, its SSI is very similar to that of Manhattan distance-based adaptiveblock-matching and 3D filtering(MD-ABM3D), and its SMPI is reduced by at least 3.30%. This method is mainly used for sonar image noise reduction, and has certain practical values for ultrasonic, radar or OCT images polluted by speckle noise.
Citation: Chen P, Cai X W, Zhao D D,Despeckling for side-scan sonar images based on adaptive block-matching and 3D filtering[J]., 2020, 47(7): 190580
Despeckling for side-scan sonar images based on adaptive block-matching and 3D filtering
Chen Peng1, Cai Xuanwei2, Zhao Dongdong1*, Liang Ronghua1, Guo Xinxin3
1College of Computer Science & Technology, Zhejiang University of Technology, Hangzhou, Zhejiang 310023, China;2College of Information Engineering, Zhejiang University of Technology, Hangzhou, Zhejiang 310023, China;3Institute of Deep-sea Science and Engineering, Chinese Academy of Sciences, Sanya, Hainan 572000, China
Side-scan sonar (SSS) is an electronic device that utilizes the propagation characteristics of sound waves under water to complete underwater detection. Because the SSS produces images and maps according to the intensity of acoustic echo, speckle noise will be inevitably involved. A speckle denoising method based on block-matching and 3D filtering (BM3D) is proposed to filter the multiplicative speckle noise in SSS images. First, the SSS image is transformed by power and logarithm. The wavelet transform is used to estimate the general noisy level of the polluted image. Second, the parameters of the BM3D algorithm are updated according to the noise estimation results of each local patch. At last, after comparing the general noise estimation and the local noise estimation, the proposed algorithm chooses the best estimation to filter every patch separately to solve the problem that the noise is not evenly distributed. The experimental results show that the improved BM3D algorithm can effectively reduce the speckle noise in SSS images and obtain good visual effects. The Equivalent Number of Looks of the proposed algorithm is at least 6.83% higher, the Speckle Suppression Index is lower than traditional algorithm, and the Speckle Suppression and Mean Preservation Index is reduced by at least 3.30%. This method is mainly used for sonar image noise reduction, and has certain practical values for ultrasonic, radar or OCT images polluted by speckle noise.
side scan sonar; speckle noise; image denoising; BM3D
TN911.73;TP391
A
10.12086/oee.2020.190580
: Chen P, Cai X W, Zhao D D,. Despeckling for side-scan sonar images based on adaptive block-matching and 3D filtering[J]., 2020,47(7): 190580
陈朋,蔡烜伟,赵冬冬,等. 基于自适应BM3D的侧扫声纳图像散斑降噪[J]. 光电工程,2020,47(7): 190580
Supported by the National Key Research and Development Program of China (2016YFC0301604), Sanya City Special Scientific Research Project (2017KS13), and the Fundamental Research Funds for the Provincial Universities of Zhejiang (RF-C2019001)
* E-mail: zhaodd@zjut.edu.cn
2019-09-26;
2019-12-24
国家重点研发计划资助项目(2016YFC0301604);三亚市专项科研试制资助项目(2017KS13);浙江省属高校基本科研业务费专项资助项目(RF-C2019001)
陈朋(1981-),男,教授,博士生导师,主要从事嵌入式系统设计、图像处理和模式识别等的研究。E-mail:chenpeng@zjut.edu.cn
赵冬冬(1990-),男,讲师,主要从事图像处理和信号处理等的研究。E-mail:zhaodd@zjut.edu.cn
猜你喜欢
上海电机学院学报(2021年5期)2021-02-11 06:54:46
房地产导刊(2020年12期)2021-01-14 09:25:06
数字通信世界(2021年2期)2021-01-13 02:22:05
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子测试(2018年14期)2018-09-26 06:04:12
雷达学报(2017年3期)2018-01-19 02:01:21
火控雷达技术(2016年2期)2016-02-06 02:29:03
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:35
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:35