
云-端协同的变电站机器人智能巡检新模式
2020-08-26 06:26杨英仪郑友亮沈映娜吴昊
广东科技 2020年8期
文/杨英仪 郑友亮 沈映娜 吴昊
作为智能电网的重要组成部分,变电站的稳定、可靠运行直接关系到电网的生产安全,进而影响到社会稳定和经济发展。变电站巡检主要是通过巡视人员对变电站所辖范围内的设备进行定期巡视检测、抄录设备运行参数来掌握设备运行情况,发现设备缺陷及可能引发的安全隐患,以便及时消除缺陷隐患,保障设备安全、可靠运行。
随着经济的持续发展和电网结构的优化升级,变电站及其设备的数量不断增加。以广东电网为例,截至2020年3月,投产的变电站达2526座、主变压器5619台、变电容量48456万千伏安。在变电站设备数量及安全可靠性要求日益提高的背景下,传统落后的人工巡检方式、严重不足的人员配备是导致巡视不到位、潜在隐患易忽略等问题的直接原因。传统人工巡检已不能适应变电站智能化运维的需求,而具备自动化巡检能力的变电站巡检机器人则成为变电站巡检的重要发展方向。通过对自主导航、传感检测、智能分析等技术手段的综合运用,变电站巡检机器人所具备的“代人”能力大大减少了巡检作业的人员投入,降低了人员劳动强度和人身安全风险,极大提升了变电站巡检的自动化、智能化和无人化水平。
变电站巡检机器人发展现状
变电站巡检机器人是典型的特种移动机器人。随着研究深入和应用范围的不断扩大,在国际上已经形成了独有的电力特种机器人应用研究领域。
国外最早研发电力相关机器人的机构包括日本三菱公司、巴西圣保罗大学和加拿大魁北克水电公司等。20世纪80年代,日本三菱公司联合东京电力公司联合开发了基于轨道行驶的500kV变电站巡检机器人,配备了红外、可见光采集设备获取变电站实时信息。2008年,巴西圣保罗大学研制的设备监测机器人采用高空行走轨道在站内移动,利用红外热像仪进行设备热点监测。加拿大魁北克水电公司研制的变电站巡检机器人实现了远程监控并配备遥控装置,支持对机器人的实时控制。
相对于国外而言,我国在变电站设备巡检机器人领域的研究起步较晚,但随着机械、传感、信息等基础支撑技术的迅速发展,我国在该领域的研究得到了迅猛发展。山东鲁能智能技术有限公司最早于1999年开始变电站巡检机器人的研究,并于2004年成功研制了第一台巡检机器人功能样机,经过多年的发展,其巡检机器人已经历了五次迭代,积累了丰富的应用经验。中国科学院沈阳自动化研究所研制的巡检机器人适应了北方冰雪天气下的全天候巡检,但是其固定轨道式的设计影响了设备全方位监测效果。此外,深圳朗驰、浙江国自、成都慧拓等公司也开展了相关机器人的研制,在一定程度上推动了机器人自主移动、智能检测等技术的进步。
近年来,中国南方电网公司(以下简称“南方电网”或“公司”)大力推动基于人工智能的“智慧生产”系统建设,并在公司《智能技术在生产技术领域应用路线方案》中明确,将“设备状态一目了然”作为生产管理体系的主要目标之一,而以机器人为主的智能装备的研发制造是实现这一目标的重要举措。根据公司的智能化巡视规划,到2020年年底将实现全网220kV及以上变电站无轨式巡视机器人全覆盖;到2025年年底实现全网110kV及以上变电站无轨式巡视机器人全覆盖。
为助力这一目标的实现,南方电网在2017年就以广东电网电力科学研究院为依托,专门成立了以产品研发为导向的智能机器人重点攻关团队,并先后自主研发了变电站室外巡检机器人和首台具有五自由度的变电站室内巡检机器人,形成了面向变电站全站的智能巡检装备研发与制造能力。目前,通过技术升级与产品迭代,南方电网研制出了小型化机器人、轨道式机器人等变电站巡检系列产品,可适应于不同变电站环境和不同业务应用需求。
变电站巡检机器人推广应用的挑战
尽管国内外变电站巡检机器人技术在近年来取得了长足进步,但由于变电站所处环境复杂多变,电网设备缺陷类型多样、缺陷处理实时性要求高等问题,变电站巡检机器人在设备巡检实时性、检测结果有效性和分析能力智能化等方面仍存在不足。此外,由于网络分区安全等方面的问题,生产台账类数据和巡检控制类数据在不同业务系统间的交互仍然没有得到有效解决,这在很大程度上影响了变电站巡检机器人的应用效果。
具体而言,当前变电站巡检机器人在推广应用方面的挑战主要体现在以下几个方面:
1.机器人巡视智能化水平仍有待进一步提升。
目前,机器人现场可见光巡视主要采集变电站设备的外观、仪表等图像数据,这些数据被传输到系统后台,再利用图像处理方法进行分析,从而判断电力系统是否存在异常。由于变电站表计安装高度、位置、角度等情况各不相同,而现场环境背景、光线、气候变化等也会对设备外观产生影响,常规的图像处理方法在泛化能力上表现不佳,变电站巡检机器人基于图像处理分析的智能化水平仍有待进一步提升。
2.站端系统无线网络通信存在不足。
当前,户外轮式巡视机器人站端系统的主流通信方式为站内专用Wi-Fi方式,这种方式要求在变电站现场建设无线网络,变电站巡检机器人与站端系统之间通过无线网络交互,但其加密和网络安防措施不能满足公司相关要求。此外,由于变电站巡检机器人与站端系统之间传输的主要是视频、图像等多媒体数据,对无线网络在带宽、速度方面的需求较高,在变电站电磁环境下的抗干扰能力也面临着较大的挑战。
3.变电站机器人系统仍是“孤岛”运行。
变电站巡检机器人系统与生产信息系统仍未联通,未能为人机协同巡视提供系统支撑。目前,机器人系统设备台账信息、巡视计划、巡视数据、缺陷管理等还没有与生产管理相关系统联动,需要人工手动录入,这增加了重复补录和维护的工作量。各变电站机器人巡检数据采集、机器人检查维护、临时任务下发执行等工作仍需依赖运行人员前往现场开展,缺乏高级分析应用功能,系统应用效率不高,机器代人效果尚未彰显。
面对这一系列挑战,云计算、人工智能、移动通信等新一代技术的融合应用提供了有利手段,尤其是随着近年来以深度学习为代表的人工智能技术的飞速发展,传统变电站机器人巡检必将迎来新一轮技术变革,逐步发展出融合人工智能技术与云-端协同的变电站机器人智能巡检新模式(见图1)。
云-端协同的机器人智能巡检
云-端协同的变电站机器人智能巡检以变电站巡检机器人为物理载体,以人工智能为核心技术,充分利用云端大规模计算集群提供智能化升级迭代能力,利用装备端侧小型化、低功耗嵌入式智能硬件提供实时智能推理能力,既满足了变电站巡检机器人前端实时巡检分析需求,又可实现云端数据共享与智能联动的协同,逐步形成云-端协同的变电站机器人智能巡检新模式,助力机器人巡检产品的规模化部署与推广应用。
1.应用架构。
从业务逻辑来看,云-端协同的变电站机器人智能巡检是一种涵盖整个变电站巡检周期内设备精确定位、装备智能控制、多模态数据融合、预测模型生成、缺陷实时感知、结果可视管控、运维辅助决策等多种关键智能化能力的复杂任务。实现这一复杂任务需要依赖于“云+端”协同的智能技术,形成具备大规模计算、智能化感知、持续性升级的智能巡检新模式。
机器人智能巡检新模式以人工智能技术为核心,在业 务应用层上构建变电站智能装备巡检系统(见图2)。该系统主要依赖于云和端两侧的智能化能力,其中,云端智能借助云端大规模数据中心、服务器集群提供的强大并行运算能力及大数据工具进行历史巡检大数据的预处理,再通过图形处理器(GPU)、专用神经网络芯片等智能硬件支持的深度学习计算框架进行设备状态感知、故障诊断、缺陷分析、状态评价、趋势研判;端侧智能则将计算、网络、存储等能力从云端向前端延伸到变电站巡检机器人本体,借助多种传感器的智能融合、模式识别和视觉即时定位与地图构建(SLAM)等技术手段,利用小型化、低功耗的智能芯片(如FPGA、NPU等)实现边缘端的智能推理,支持面向变电站设备的实时性、智能化巡检。
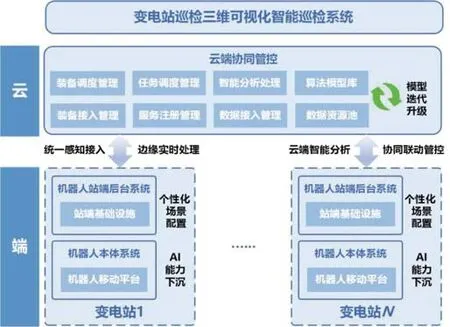
图2 变电站智能装备巡检系统的应用架构
变电站智能装备巡检系统具有如下几个特点:一是云-端智能兼备,技术深度协同。一方面,现场巡检数据通过端侧变电站巡检机器人及其搭载的传感检测设备的采集、传输,逐渐汇聚、累积形成海量巡检样本,支持云端深度学习网络大规模训练与智能模型形成;另一方面,深度学习模型通过剪枝、蒸馏、压缩等优化处理,可向资源有限的端侧机器人本体迁移,并在机载智能硬件的支持下进行实时推理与分析。二是业务系统交互,智能装备联动。通过与其他变电生产业务系统建立联通接口,实现业务、数据的共享与交互,云-端协同支持的变电站智能装备巡检系统既具备运检业务辅助决策能力,也具备面向边缘侧变电站室内外多种类型、多台巡检机器人的智能决策管控能力。三是服务巡检领域,支持扩展延伸。云-端协同的变电站机器人智能巡检新模式,是以变电站智能巡检为业务场景,以变电站智能巡检机器人为端侧物理载体,以变电站智能装备巡检系统为云端大规模推理分析引擎,通过云-端智能协同运作,实现变电站设备巡检、故障数据分析、缺陷智能诊断、状态趋势预测等核心功能。围绕这一新模式的软硬件构建形式与系统运作方式,支持相关方法、算法、技术和能力的持续优化和改进,且可逐渐推广应用于电网其他生产领域乃至其他垂直行业领域。
2.技术架构。
以变电站智能化巡检为目标,云-端协同的变电站机器人智能巡检新模式的形成需要云端和边缘端核心技术的支持,也需要包括基础设施资源、辅助工具等各类基础软硬件的支撑。作为模式具体载体的变电站智能装备巡检系统整体技术架构如图3所示。

图3 变电站智能装备巡检系统的技术架构
(1)智能与通信:技术演进。
近年来,人工智能技术发展迅速,在电网领域得到了广泛的关注和应用。从2012年开始,深度学习方法在计算机视觉、语音识别、自然语言处理等方面取得了较大突破,不少任务性能在大规模数据集上得到了大幅度地提升。在变电站机器人领域,“电力深度视觉”的概念也被提出。它指的是基于深度学习计算机视觉技术,对机器人、无人机及视觉传感装置等智能化装备拍摄到的影像进行包括目标检测、图像分割、定位跟踪等视觉方面的分析和处理,从而快速、准确地感知和理解电力对象的信息。当前,南方电网已经围绕此类技术进行了多方面的探索和研究,并在变电站巡检领域开展了系列试点应用。随着云-端协同的变电站机器人智能巡检新模式的提出,以深度学习为核心的智能视觉感知技术将得到进一步的推广和运用。
变电站巡检在通信场景中主要归属采集类业务,因为变电站巡检机器人主要是对变电站范围内的设备、缺陷、状态等数据进行采集,有大量高清视频回传需求,在局部带宽需求上达到100Mbps的量级。在变电站巡检机器人的具体应用中,既有时延和可靠性要求不高的应用(如数据备份、训练数据采集等),也有实时视频传输交互,甚至对时延和可靠性要求都非常高的机器人运动控制、远程操控等,因此,此类场景通常采用eMBB(增强移动宽带)切片, 该切片的带宽可达到4~100Mbps,延迟小于200ms,满足了新模式云-端协同的需求。
(1)端侧:机器人服务提升。
“端”在靠近设备并产生实时数据的数据源端提供智能化服务。针对所搭载的可见光、红外传感器云台采集的视频图像数据,变电站巡检机器人可以利用嵌入集成到机器人移动平台上的智能硬件进行前端推理,结合应用广泛的智能传感器、检测设备和监测系统,机器人可通过模式识别和信号分析等能力,实现对监控对象的智能识别、异常感知、缺陷诊断与实时预警,为现场巡视工作提供快速响应和支持,提高巡检效率,保证数据安全与隐私。
(3)云端:机器人能力增强。
“云”凭借强大的计算集群和大数据工具对所积累的海量巡检样本数据进行清洗、去噪等预处理,在此基础上通过机器学习、深度学习等人工智能方法开展设备状态分析与潜在价值挖掘,形成智能计算分析能力;同时,灵活协调变电站智能巡检机器人巡检,为运维人员提供预测性维护建议,为巡检部门提供灵活协调机器人巡检作业的依据,为管理人员提供管理决策辅助支持,全面提高变电站设备运检质量和智能化管理水平。此外,云端大规模训练推理的一个重要优势在于:通过云端迭代训练形成的智能模型,可以通过剪枝、蒸馏、压缩等优化,形成可迁移并分发到机器人端提供智能推理的端侧模型,从而达到云-端智能协同的良性循环。
结论与展望
当前,变电站巡检机器人已经得到了广泛的研究和发展,但是其大规模的推广应用面临着通信互联、数据共享、业务交互、智能协同等方面的挑战。凭借新一代智能技术与通信技术的飞速发展,建立变电站智能装备巡检系统,搭建云-端快速互联互通渠道,充分发挥云端高性能计算能力和边缘端实时推理能力,将能够有效形成云-端协同的变电站机器人智能巡检新模式,助力变电站巡检机器人的大规模部署运用,并最终促进变电设备可靠性和运维智能化,提升电网自动化、无人化和智能化管理水平。
猜你喜欢
军事文摘(2022年19期)2022-10-18
华人时刊(2022年5期)2022-06-05
印刷工业(2020年4期)2020-10-27
现代装饰(2020年5期)2020-05-30
电子制作(2018年8期)2018-06-26
中国交通信息化(2017年4期)2017-06-06
电子制作(2017年8期)2017-06-05
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
现代工业经济和信息化(2016年5期)2016-05-17
东北电力技术(2016年2期)2016-05-17
