
云机器人:未来机器人新模式
2020-08-26 06:26吴鸿敏徐智浩周松斌周雪峰
广东科技 2020年8期
文/吴鸿敏 徐智浩 周松斌 周雪峰
自新冠肺炎疫情发生以来,云会议、云协作等技术正逐渐改变人们的工作方式,而云端服务也给机器人带来了新的发展机遇,云端医疗防护机器人、云端体温检测机器人等被大量应用。
云机器人概况
长期以来,人们对机器人充满着幻想,希望它能够拥有类人的感知、认知、动作和自然交互能力,但目前机器人个体的计算能力有限,对场景的感知、理解与决策能力不足,远不及人们的预期,因此,提高机器人智能化水平是未来机器人领域的重要研究方向。
云机器人是云计算、人工智能、5G通信、大数据和工业互联网等技术的重要载体,给机器人提供一个更智能的云端大脑,既可以增强单个机器人的能力,又可以让分布在世界各地、具有不同能力的机器人打破地域限制,互相合作、信息共享,完成更复杂的任务。基于此,云机器人应具备四大特征:一是硬件无关。云端大脑能够建立机器人、传感器及周边设备的一般性模型,分析与决策算法不依赖于特定的硬件、接口及协议等。二是传感共享。云机器人执行任务过程的传感数据将直接上云,通过云端实现传感信息共享。三是技能派生。云机器人具备对不同场景下的操作技能进行存储,以及由人工智能技术从已有技能中学习以及衍生新技能的能力。四是群体智能。云机器人具有自组织性,并通过分布式交互实现群体在复杂行为中的智能协作。
在新型基础设施建设环境下,云机器人将广泛扩展机器人应用领域(见图1),并加速和简化机器人系统的开发过程,降低机器人构造与使用成本,因此,无论是家庭机器人、工业机器人,还是医疗机器人,其发展都将具有极其深远的意义。
云机器人关键技术
1.大数据与“云-边-端”计算技术

图1 云机器人应用场景示例
云机器人框架下的大数据是指各个机器人系统为了能够精确地感知与理解环境以支持本体的移动、避障、交互和操作,通常需要集成大量的传感器,如深度相机、激光雷达、触觉传感器、力觉传感器、麦克风阵列等,这将产生海量的多源异构数据。如果将如此庞大的数据直接传输到云端进行处理,既不现实也不高效。为此,采用“云-边-端”协同计算的架构,在云平台上可提供高性能计算以及通用知识的存储,在边缘设备上可进行数据的有效处理和算力支持,在机器人终端上完成实时的操作与控制处理,从而实现大规模机器人应用场景下更经济、有效的部署,具体的技术设计方案如图2所示。同时,利用5G通信和互联网技术将机器人无缝连接,使生产制造更加扁平化、定制化、智能化,实现数据共享、敏捷互联、应用云化、智慧决策,促进机器人在工业控制、物流追踪、柔性制造等应用场景的通用智能化,有利于制造业的转型升级以及智能制造的发展。
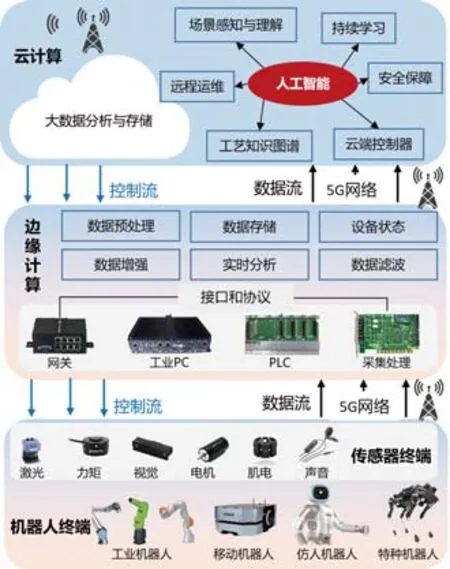
图2 云机器人的“云-边-端”计算
2.机器人持续学习技术
云机器人学习技术不仅包括传统机器人基于大数据的监督学习功能,还需要增加持续学习和群体学习的能力,使机器人个体能够快速适应复杂多样的应用场景。目前,受限于数据量不足和计算效率低下等问题,机器人学习到的模型鲁棒性差、效率不高。解决上述问题的关键是让机器人能获取大量训练数据及优质的算力支持,而这恰好是云机器人架构所具备的能力。
云机器人学习的核心思路是让机器人能够自己学会执行各种决策任务,即具有类人的持续学习能力,并且能够在机器人间或机器人与其他智能体间进行协同学习。具体来说,云机器人个体可以先通过少量数据建立基本的环境交互能力,然后根据完成任务所需的技能自主地从云平台中找到更多相关数据,并进行增强训练、模仿学习、技能迁移等。随着这个过程的不断进行,云机器人逐步实现自主持续学习。具体的技术设计方案如图3所示。
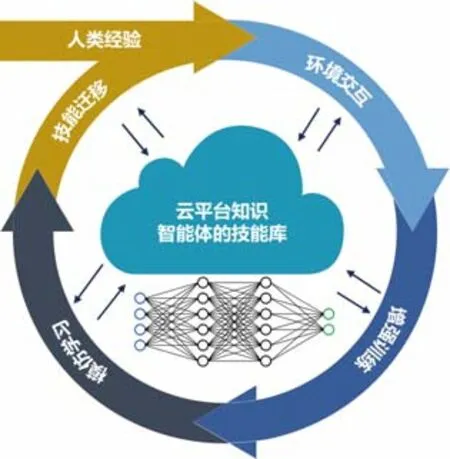
图3 云机器人的持续学习
3.场景感知与理解技术
云机器人框架下的场景感知与理解将为机器人的个性化服务和持续学习提供保障,使机器人能够根据当前的场景进行相应的自适应调整。此时,场景感知与理解通常需要采用多种传感器对场景进行三维语义理解,并实现物体识别、三维重建、“人-机-物”融合以及场景预测等功能。具体的技术设计方案如图4所示。
利用深度视觉对机器人操作环境与任务的快速测量、识别与解释,能够提升生产效能和运行柔性,提高智能性。而现阶段的机器人三维视觉感知须依赖高性能的图像处理硬件与算法,对中小型制造企业有过高成本和技术门槛。云机器人框架下,将通过5G通信,将具有视觉感知的机器人与云端大脑相连,借助低延时联网可以实时控制视觉增强的机器人传感器和其他硬件,利用云计算,在增强机器人场景感知与理解能力的同时,降低机器人本体的硬件需求,实现传感共享。
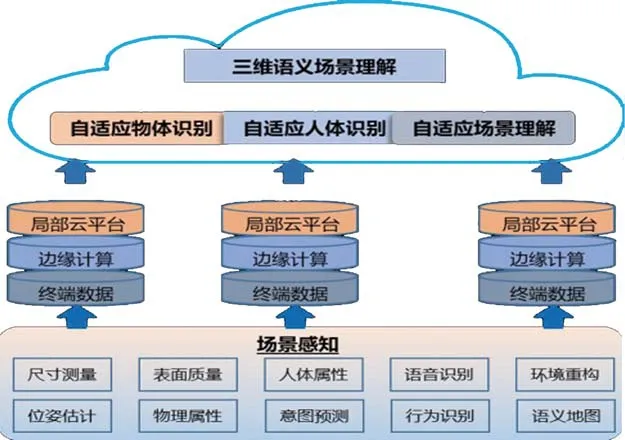
图4 云机器人的场景感知与理解
4.面向 行业的机器人制造工艺知识图谱
云机器人本体的应用场景复杂多样,构建面向行业的机器人制造工艺知识图谱可以加强工艺信息的共享,大幅度减少机器人场景自适应时间。该知识图谱的信息是从前述的场景感知与理解中获取的,能进一步对机器人学到的知识进行模式挖掘以获取更高层的常识知识,并存入云端大脑。具体的技术设计方案如图5所示。同时,知识图谱可以作为场景感知与理解的先验知识,提升场景认知的能力。
机器人已被广泛应用于汽车制造、物流仓储、家庭服务、医疗等领域,主要制造工艺包括机器人上下料、焊接、抛磨、装配、搬运、检测、灵巧操作等。伴随着各行业迈向集成化、智能化、个性化的柔性生产,迫使机器人拥有动态和个性化的知识,不仅要对其所在的环境和人进行深入感知与理解,而且通过工业物联网建立机器人、环境、人、事件等相关信息的关联,实现任务工作操作过程中工艺知识共享、万物互联的工艺知识图谱。不同于以往独立运行的知识图谱和计算机视觉,云机器人框架下面向行业的工艺知识图谱将融合人工智能和5G技术,以实现更高级的持续学习和柔性生产。
5.基于云平台的故障诊断和远程运维
机器人作为制造业的核心装备,在现代柔性加工中应用越来越广泛,保证机器人持续运作的稳定性和可靠性是提高生产效益的前提保障。而目前,大部分制造生产现场的设备通过工业总线或高速以太网进行数据传输,存在延时长的问题。随着5G基站和边缘设备的部署,机器人端到基站的延迟可以缩小到毫秒级,采用基于5G网络的实时视频监控和设备运行状态数据跟踪,其高速率、低时延、高可靠性的优势尽显。因此,构建云机器人平台,实现机器人及其周边设备的远程在线状态监控、实时故障报警和诊断分析,远程故障定位、设备程序升级以及大数据分析等功能。具体的技术设计方案如图6所示。
云机器人应用场景分析
1.物体抓取
未知物体的抓取是机器人应用于工业、服务、医疗等领域的基本技能,具有重要的现实意义。传统基于几何分析和特征提取的方法在处理完全未知物体时存在明显的不足,而引入深度神经网络对未知物体特征进行学习的方法被证实可以显著提高机器人抓取的鲁棒性和准确性。此时,需要大量数据的采集、预处理和计算,借助云计算和5G通信技术,将不同场景下机器人抓取应用的数据传输到云端,经过学习后将抓取策略传送给机器人,实现数据共享及协同学习。
2019 年,加州大学伯克利分校、斯坦福大学、宾夕法尼亚大学、卡内基梅隆大学联合提出了一个用于共享机器人抓取经验的开放数据库RoboNet,该数据库提供了来自7个不同机器人的1500万个视频帧,用于研究如何学习基于视觉的机器人通用模型,实现在新物体、新任务、新场景、新视角抓取工具,甚至是全新机器人上的操作性能。结果表明,通过在RoboNet上进行预训练及抓取参数的微调后,可以超越使用4倍至20倍数据在特定机器人训练方法上的性能。

图5 云机器人的制造工艺知识图谱

图6 云机器人的故障诊断和远程运维
2.自主导航
即时定位与地 图构建(simult aneous localization and mapping,SLAM)是指机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位姿,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。此时,需要在机器人周围安装各种各样的传感器,以实现环境感知、建图、导航及避障等功能,但由于机载资源有限,无论是局部还是全局的导航问题都容易受到计算和存储任务的困扰,尤其在大规模导航领域极具挑战性。借助云机器人框架中的“云-边-端”计算框架是解决上述问题的重要途径。
一方面,云计算不仅能够提供足够的存储空间来处理用于映射的大量数据,而且具有足够的计算能力以允许地图搜索和建立;另一方面,通过云计算,还可以利用商业地图(如Google地图、百度地图)来提供灵活、可靠和自主的导航。例如,在新冠肺炎疫情期间,达闼科技推出了基于5G网络的智能测温巡查机器人,在终端采用具备高灵敏度和精准度的仪器,云端则包括密集人群人体自动识别、人体动态追踪跟随等算法,以及高温告警和后台实时数据处理等技术。
3.多任务学习
人类能够从复杂多样的任务中学习共性的操作经验,从而加快掌握新任务,甚至实现“举一反三”的应用,例如当人类学会骑自行车后,便能很快地掌握骑摩托车的操作技能,又或者在学会C++编程规则后,便能很快地掌握使用Python编程。如何让机器人能够从多任务中学习一般性的操作技能,并且能快速适应全新的机器人平台和应用场景,是当今机器人领域最前沿的研究技术。
谷歌机器人研究中心在2020年年初联合加州大学伯克利分校、斯坦福大学等机构提出了基于元强化学习算法的机器人多任务学习基准,该基准包含了推拉、抓放、堆叠等50个不同的机器人操作任务,并将学到的技能扩展应用于从未接触过的开门、轴孔装配等任务。
丰田研究院首席执行官吉尔·普拉特(Gill Pratt)在2015年曾表示“机器人技术爆炸的关键在于云机器人技术和深度学习的结合”,并在2019年提出了“舰队学习”系统,使一个机器人能够从人或模拟中学习执行任务,然后与所有其他机器人共享该知识,以便他们可以在新情况下执行任务,这样就可以实现机器人技能呈指数级增长。目前,该系统可以成功地执行约85%相对复杂的人类级任务。
4.故障诊断及远程运维
故障诊断及远程运维系统能够实现设备远程状态监控、实时告警通知、故障诊断分析、远程故障定位和程序升级、资产管理以及预防性维护等功能,对企业生产的经济效益意义重大。通过将设备传感数据上传至云端,借助云计算和大数据挖掘技术,能够生成维修计划和日记,降低维护成本。
佛山隆深机器人研发了基于“云端大脑”的故障诊断及远程运维系统,通过在机器人本体上增设一台数据处理的边端装置,将应用于不同领域、不同工位的机器人状态信息连接到云端,借助云端中人工智能算法,实现24小时的故障诊断和机器人运行节拍分析,能够大幅度提高机器人运行效率,减少停机时间,提高生产效率。目前,该系统已成功实现不少于1000台机器人的上云服务。
云机器人发展的挑战与展望
云机器人将在家庭服务、智能制造、医疗等领域的应用场景中帮助人们完成个性化和定制化任务,在“云-边-端”下所产生大量的隐私数据须进行管理和保护,要求在数据存储和网络传输各个环节对用户的隐私数据设计安全保障机制,例如可以通过数据脱敏手段来消除隐私性,并且在云平台、边缘 设备和机器人终端设计不同级别的安全访问权,实现安全可靠的计算资源和数据共享。
机器人智能化的目标主要是沿着类人的方向迈进,人类能够通过不断地索、开发和利用,增强自身在各领域、各场景中的技能,而机器人在自我学习、改进和技能提升方面依然存在不足。未来在云端大脑中,通过学会学习、神经网络架构搜索等技术实现高鲁棒性和高效的机器人持续学习是提升智能机器人应用的关键。
随着机器人应用需求的多样性,机器人制造商、集成商等须建立统一标准的机器人开源软件平台,这将有助于建设开放、共赢的云机器人平台,从而更好地为人类服务。
猜你喜欢
华人时刊(2022年5期)2022-06-05
奥秘(2020年6期)2020-06-30
现代装饰(2020年5期)2020-05-30
金桥(2019年10期)2019-08-13
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
人力资源(2015年7期)2015-08-06
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
小说月刊(2014年9期)2014-11-18
