植保无人机飞控系统与航线规划研究进展分析
2020-08-26 07:44曹光乔李亦白张进龙
农业机械学报 2020年8期
曹光乔 李亦白 南 风 刘 东 陈 聪 张进龙
(农业农村部南京农业机械化研究所, 南京 210014)
0 引言
植保无人机是用于农林植物保护、防治病虫草害的无人驾驶飞机(Unmanned aerial vehicle,UAV)[1]。植保无人机具有作业灵活、效率高、成本低、突击能力强等优点[2-3],可适应大田、水田、丘陵山地等多种环境。与地面植保机具相比,植保无人机在作业效果与作业效率上更具优势[2]。目前,绿色植保、生态安全理念日益深入人心,我国植保无人机行业也发展迅速。近年来,我国植保无人机不仅用于水田及丘陵等复杂地形,还用于小麦、花生和棉花等多种作物,飞防作业方式得到越来越多农户的认可,已逐渐取代传统植保作业方式[4]。使用25、15 kg有效载荷无人机进行喷施作业时,其年度收益分别是机械喷雾机的33倍和25倍,是人工喷雾(不包括人工成本)的133倍和93倍[5-7]。植保无人机防治效果分别比人工和机械提高15%和35%,对突发性病虫害的防治起到了较好的效果[8-9]。与有人驾驶飞机相比,无人机对起飞和降落无特殊要求,飞行高度低、可悬停、农药飘移少、雾滴穿透性好,对环境的污染小[10-11]。2014年我国拥有植保无人机695架[11],作业2.84×105hm2·次,2018年植保无人机保有量3.15万架,作业2×107hm2·次。增强作业效果与提高作业效率是促进植保无人机行业发展的重要环节[12-13]。无人机作业效果受到导航、飞行控制以及喷洒系统的影响[14],作业效率受到单机航线规划、多机协同优化的影响。本文从植保无人机飞行控制系统、单机航线规划和多机协同调度优化方法3个角度对无人机的飞控系统及航线规划进行综述,以期为推动我国植保无人机行业的健康快速发展提供参考。
1 植保无人机发展与现状
1.1 国外植保无人机发展与现状
农业航空技术是指利用飞机完成农业作业的一项技术,其飞机可分为有人驾驶飞机和无人驾驶飞机。美国的航空施药设备以有人驾驶固定翼飞机为主(约占88%)[15]。但近年来,使用无人驾驶飞机进行化肥农药喷洒、农业管理、产量估算等作业在美国得到了实践应用[16-17]。美国农业和生物工程师协会(ASABE)制订了UAV标准,并获得了美国国家标准协会认可。2015年,美国联邦航空管理局正式批准无人机可用于农作物监测与植保作业,形成了较为统一的行业标准,但只有获得特殊授权证书的个人、代理机构才能用于商业飞行[18]。目前,美国是农业航空发达国家之一,2017年已经拥有超过20种9 000多架农业飞机[15],占世界总拥有量的28%,对农业的直接贡献率为15%以上,航空植保作业面积为65%[18]。美国无人机广泛加载GPS、自动导航、施药自动控制等操作系统,不仅能够精准、高效地完成作业,对环境污染也较小。除喷洒作业外,美国还利用植保无人机进行遥感测绘,用于农事管理与产量估算,很大程度上解决了因信息缺失或失准造成的粮食生产损失[19-20],保证了粮食产量。
日本人均耕地面积较少,且地形多山,使用植保无人机成为解决农村劳动力紧缺的重要方法[21]。1958年日本将有人驾驶直升机应用在稻田害虫和稻瘟病的防治上,受限于污染和安全等问题,1983年提出有人驾驶直升机和无人驾驶直升机共同完成植保作业[22]。1987年日本雅马哈公司研制出世界上第一台农业用无人机,成为第一个使用小型植保无人机的国家。目前,日本植保无人机技术得到快速发展,已经达到世界领先水平。2004年水稻生产作业中,无人机的使用规模已经大于有人驾驶直升机[15]。2018年日本植保无人机市场装机总容量达2 788架(以单旋翼直升机为主),获得国家植保无人机操作证书的操作人员共10 545人,无人机覆盖率达到70%[18]。无人机还广泛应用在遥感测绘和害虫驱除等任务中[23]。在植保无人机管理方面,建立了政府监管和行业协同管理的推动模式,加强植保无人机购买补贴、操作人员培训。大力发展农业航空植保专用药剂,促进植保无人机技术的进一步发展。日本经产省2020年向国际标准化组织提交认证申请,拟主导国际无人机标准制订,以利于自产的无人机在国际上得到推广[23]。
美国、俄罗斯、加拿大等因农场的规模化种植和同种作物大量连片种植模式,更适合有人驾驶飞机进行植保作业。随着植保无人机技术的发展和应用场景的不断扩展,植保无人机技术在上述国家也逐渐得到发展。日本、韩国等国家植保无人机针对山地、丘陵等复杂地貌的作业研究发展较早,应用广泛,发展水平也较高,对我国山地丘陵等地形的植保无人机研究具有借鉴意义[24]。
1.2 我国植保无人机发展与现状
中国有人驾驶的航空植保业发展较早,1951年我国将大型固定翼飞机用在防治东亚飞蝗、森林防火和播种造林等工作[3]。有人驾驶的大型固定翼飞机只适合大面积的农垦地区[17],南方丘陵、地形复杂的山区、小地块无法使用。2008年农业部南京农业机械化研究所、中国农业大学等单位共同承担的科技部“863”计划项目《水田超低空低量施药技术研究与装备创新》,标志着我国科研机构正式开始研究植保无人机技术。
植保无人机种类众多,按照升力部件可分为单旋翼无人机、多旋翼无人机;按动力部件可分为电动无人机、油动无人机。目前我国植保无人机市场上主要有油动单旋翼、电动单旋翼和电动多旋翼植保无人机3种类型[25],其性能指标见表1。现阶段,植保作业需求方可通过官方或非官方发布订单,进行服务预定,服务提供商以飞防作业队的形式提供植保服务。一个飞防队可包含多个作业机手和多台植保无人机,一个机手可以为多台无人机提供更换电池、补充药液的专业服务。提高植保无人机智能化水平,进一步改进了植保无人机作业效率和效果,成为植保无人机发展的重要方向。
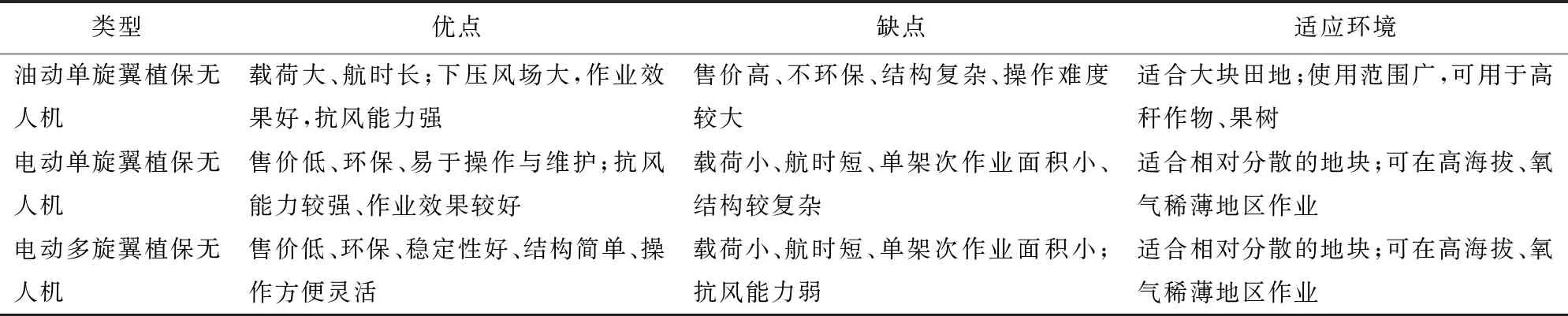
表1 我国常见植保无人机机型及性能Tab.1 Common plant protection UAVs models and performance comparison in China
1.3 我国植保无人机应用存在的问题
(1)精准控制技术的成本高:植保无人机逐步发展到自主飞行作业阶段,超低空飞行气流扰动与无人飞机药液晃动,会影响植保无人机飞行精度,增加了农药的重喷、漏喷率,增加了农药使用量[26-27]。高精度的飞行控制系统可减少误差,但高精度飞行控制系统成本较高,研发低成本的植保无人机飞行控制系统可提升植保无人机的作业效果。
(2)单机作业效率低:植保无人机单机作业效率受飞行避障、电池、农药补给、田间航线规划等方面的影响较大。电动多旋翼无人机是目前最受欢迎的植保无人机,具有操作灵活、起降迅速、成本低的优点,但飞行时间较短、载荷较低,作业过程需多次人工更换电池和农药补给[27];实时避障技术不成熟,机手一般采用手工标注障碍物位置,再进行航线规划的方法躲避障碍物,制约了植保无人机的单机作业效率。
(3)多机群作业订单分配依赖人工经验:植保作业管理在多机群飞行航线规划的基础上,结合我国植保作业以飞防队为主的现状,进行订单管理与订单分配的研究,可有效提升植保作业的整体效率。
本文将从以上方面综述研究进展与行业应用情况,总结提出植保无人机的研究热点和未来发展趋势。
2 无人机飞行姿态控制
无人机飞行姿态控制对监控无人机飞行状态和作业性能评价有重要意义。其中飞机航向、姿态(俯仰角、横滚角、偏航角)、空速、高度等重要飞行参数在无人机飞行过程中必须动态监控,确保无人机按照既定轨迹安全飞行。
2.1 飞行数据监测系统
随着传感技术的发展,惯性导航逐渐成为主流监测方式。惯性导航是一种完全自主的独立导航系统,工作时仅依靠自身内部传感器——陀螺仪、加速度计,而无需与外界发生任何联系,就能为载体提供姿态、速度、位置等导航信息[28]。其中捷联惯性导航由于结构简单、体积小、易于安装维护和性能提升、成本低等优势[29],成为主流惯性导航系统。按照应用场景和精度级别不同,捷联惯性导航可分为消费级、战术级、导航级、战略级4个级别,每个级别对应的陀螺仪和加速度计的精度均有不同,具体见表2[30]。

表2 不同惯性导航应用级别精度Tab.2 Accuracy of different inertial navigation application levels

2.2 飞行姿态估计
通过陀螺仪、加速度计、磁力计等传感器获取的无人机飞行姿态数据,包括高度、气压、姿态角(航向角、俯仰角和滚动角)以及3个坐标轴的速度(向东速度、向北速度和垂直速度)等,无人机飞行姿态和操作状态必须通过飞行数据来推断,因此准确估计和预测飞行数据尤为重要。基于无人机工作环境的复杂性,MEMS传感器采集的数据存在干扰因素,如何排除干扰,准确估计和预测高精度的飞行数据成为研究热点。
干扰源:大多数植保无人机惯性导航系统(Inertial navigation,INS)均采用微机械系统(MEMS)惯性传感技术,这些技术成本低廉且功耗低。但是,与有源陀螺仪和干涉式光纤传感器等陀螺仪相比,MEMS陀螺仪精度较差,偏差较大,比例因子较大,噪声较大且对环境影响敏感。同时MEMS传感器制造工艺水平无法达到绝对一致性,故在制造工艺和原材料方面不可避免会引入额外的随机噪声[39], MEMS 陀螺仪在启动阶段瞬时电压不稳定也会造成 MEMS 陀螺仪在上电阶段产生随机波动误差[40],且具有强烈的非线性[41]。多旋翼无人机惯性测量单元(Inertial measurement unit, IMU)普遍采用成本较低的器件,精度相对较差,长时间工作容易产生漂移[42]。传统惯性导航系统通常采用地球正常重力模型。用计算得到的正常重力来代替实际重力进行重力补偿,但计算值与实际值之间存在差值,也称重力扰动,成为影响惯导系统精度的主要误差源之一[43-48]。无人机飞行过程中,还不可避免受到常值风、突风和大气紊流等风扰动影响,从而影响MEMS器件采集飞行数据的稳定性和精度[49-50]。
数据融合:基于MEMS的INS不提供直接的姿态估计,为了提高基于MEMS的INS的性能和鲁棒性,需要滤波以及数据融合来有效地实现无人机姿态跟踪和估计。最有效的估算和预测工具是卡尔曼滤波器(Kalman filtering,KF),包括粒子滤波器(Particle filter,PF)[51]、扩展卡尔曼滤波器(Extended Kalman filter,EKF)和无损卡尔曼滤波器(Unscented Kalman filter,UKF)等[52-53]。KF可不间断地估计样本数据的后验概率分布,然后基于状态转移模型和观测模型,并通过传感器传回实时数据,预测出无人机的飞行过程状态[54]。 YI等[55]针对存在执行器故障的无人四旋翼直升机(Qball-X4)的故障检测与诊断问题,提出一种基于粒子滤波器(PF)的故障检测和状态估计方法,用于通过集成线性二次型最优控制(LQ)技术来控制Qball-X4[56]的飞行高度。JING等[57]提出了一种基于扩展卡尔曼滤波器(EKF)的无人机姿态估计方法,将磁传感器、角速率传感器和重力传感器采集的飞行数据融合成姿态四元数来表示无人机的姿态[57]。
扩展卡尔曼滤波器(EKF)是用于姿态估计的非线性滤波的主要工具[58]。但是,EKF中隐含的线性化在非线性测量模型以及缺乏良好的先验状态估计的情况下,会导致姿态估计性能下降、发散和增大估计误差。 EKF滤波器的局限性也推动了更多具有更高鲁棒性和准确性的非线性姿态估计算法的发展,如Sigma点或无损卡尔曼滤波器(UKF)、最佳卡尔曼滤波器(Optimal Kalman filter, OKF)、粒子滤波器(PF)和广义互补扩展卡尔曼滤波器。与EKF相比,新发展的滤波器显示出较低的误差预期,高阶泰勒级数展开的隐含性以及对不可微函数的适用性[58]。吴和龙等[59]基于20维状态量的CPF-EKF算法,额外引入了陀螺仪、加速度计和磁力计偏置误差作为状态量,使三轴姿态角的最优估计值更加准确。TEIXEIRA等[60]分别利用EKF和UKF进行固定翼无人机姿态估计,结果表明UKF表现出更好的性能和鲁棒性。XIONG等[61]发现在存在高斯过程和测量噪声的情况下,使用OKF来估计四旋翼无人机的姿态,可以获得高精度的位置和姿态跟踪。RODRIGUEZ等[62]基于扩展卡尔曼滤波器(EKF),提出了一种用于评估无人机飞行过程中锂电池充电状态的方法。HE等[63]通过考虑无人机六轴推进系统的数学模型,可以计算出功耗,并估算电池的剩余量,预测电池供电终止时间。KADA等[64]使用UKF和最小能量KF解决了无人机姿态估计问题。
2.3 飞行姿态控制
农业植保无人机贴近地面飞行,地面地势变化以及超低空飞行气流扰动改变都会严重影响无人机的飞行姿态,喷药过程中无人机药液晃动带动无人机本身晃动,也会影响飞机的飞行姿态与农药喷洒效果,并且在喷药过程中,飞行器自身质量会持续改变[65],均会导致飞机既定飞行路径偏移,因此必须动态控制植保飞机的飞行姿态[66](图1)。
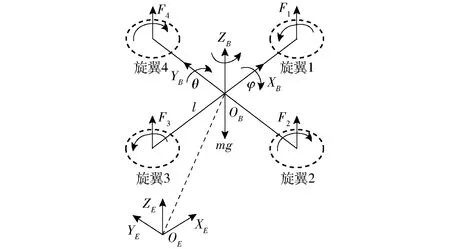
图1 无人飞机坐标系示意图Fig.1 Schematic of UAV coordinate system
无人飞机空间运动的 6 个自由度为: 3 个质心运动(平移x、y、z)和 3个角运动(俯仰角θ、横滚角φ、偏航角Ψ);四旋翼无人飞机的4个输入为:升力F1、F2、F3、F4[67]。无人机的飞行姿态由其6个自由度共同决定,6个自由度又由4个输入共同决定,4个输入由4旋翼转速决定。以四旋翼无人飞机为例,其姿态控制机制如表3所示。
多旋翼飞行器姿态控制大多采用普通比例积分微分控制算法[68],但是当载荷变动量接近甚至超过系统本身重量时,在较大外界干扰下,基于普通比例积分微分(Proportion, integration,differentiation,PID)控制算法的系统容易产生振荡,导致飞行失稳。王大伟等[66]针对四旋翼无人飞机欠驱动、强耦合非线性系统航线跟踪问题,提出了一种滑模航线跟踪控制策略,其姿态和位置控制具有良好的效果。陈鹏等[69]结合PID 控制算法与智能模糊控制算法,设计了一种自适应模糊 PID 无人机姿态控制器,提高了无人机抗干扰性能。杨雨婷等[70]为解决民用无人机飞控系统的高可靠性、实时性等要求,将 AADL 语言应用于民用无人机飞控系统建模与分析中,减小了后期系统发生错误的概率。吕海龙[71]根据单向辅助面滑模控制方法,设计了系统内外回路的姿态控制器,保证了无人机机动飞行过程的安全性与稳定性。杨恩泉等[72]对无人机机动飞行航线跟踪系统的内环采用非线性动态逆方法,外环采用逆动力学前馈加模糊反馈的控制结构,提高了飞行航线的跟踪精度。
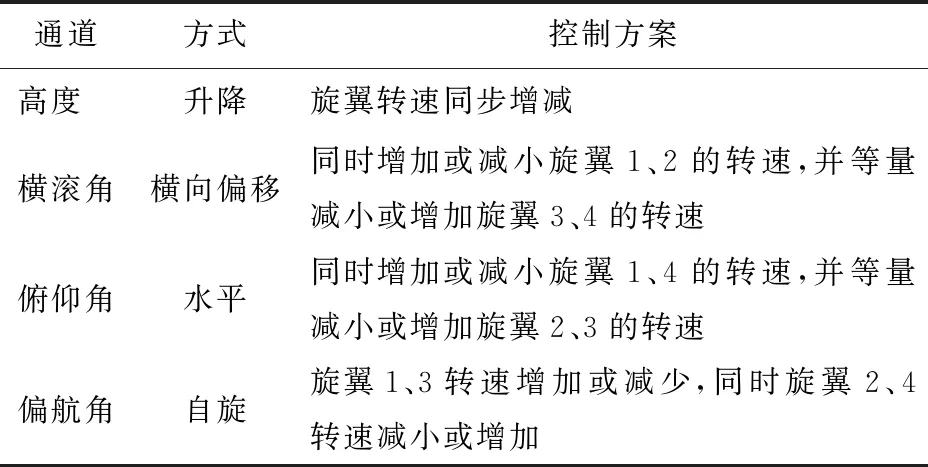
表3 四旋翼无人机姿态控制机制Tab.3 Four-rotor UAV attitude control mechanism
2.4 飞行定位导航
自动定位技术是保障植保无人机作业的基础,自动定位技术能够减小农药和无人机本身对作业人员的伤害概率,同时提高作业效率。
2.4.1GNSS导航方法
全球卫星定位导航系统(Global navigaion satellite system, GNSS)具有定位精度高,不受时间和地域限制的优点,但其导航信息更新频次低,动态性差[73]。GNSS包括GPS、Glonass、Galileo、BDS四大系统,其中以GPS发展最早,技术最成熟。国外发达国家的农用航空飞机都配备精密的GPS 导航设备与系统[74],无人机使用GPS进行植保作业或农情数据采集导航的研究时间较长,技术相对成熟[75-77],我国学者在此领域起步较晚,研究重点集中在分析与改进GPS导航精度上[78-80]。北斗卫星系统是我国自主研制的卫星导航系统,具有全部知识产权,可摆脱对国外卫星导航系统的依赖,保证无人机的飞行路径与精度不受到外部干扰。我国学者针对北斗导航进行了植保无人机的导航作业研究和试验[81-82]。基于GPS与北斗系统的植保无人机导航精度误差均在10 m左右,基于GNSS定位的导航系统导航精度低,但在大尺度范围下导航效果稳定且成本较低[83]。
载波相位差分技术(Real-time kinematic,RTK)是将两个或多个基准站采集的载波相位发给用户接收机,接收机进行差分计算得到飞机坐标,是一种新的卫星定位测量方法,具有导航精度高、成本相对较低的优点,能够直接获得无人机的绝对位置,是GPS应用的重大改进技术[84-86]。目前该定位技术被大疆、极飞、汉和、全丰等公司的多种无人机产品所采用。
2.4.2组合导航技术
惯性导航具有短时间内导航精度高的优点,但惯性导航精度越高,成本越高,且该方法易受气流影响,目前该技术主要应用于军事无人机的导航中。有国内外学者将惯性导航与GNSS系统结合用于植保无人机导航作业的研究[87]。受到植保无人机的成本约束和农业作业环境中复杂风向、气流因素的影响,使用该方法导航的植保无人机的飞行最大偏航距为3 m,平均偏航距在0.1 m左右[87]。开发低成本且适用于农业作业环境的全球卫星定位+惯性导航系统成为该技术在植保无人机上应用的研究方向。
基于机器视觉的导航方法具有实时性强、成本低的优点[88],单目视觉处理技术可快速获得无人机周围环境的二维信息,进行植保无人机的相对位置判断。单目相机搭载在植保无人机上,可作为精准施药的辅助工具[89]。双目视觉方法可获得植保无人机周围环境的二维信息与深度信息,其数据层次更为丰富,但数据处理速度较慢,主要应用于植保无人机的避障探测[90]。视觉方法与全球卫星定位相结合的导航方法可在全球卫星定位获取绝对位置的基础上结合视觉方法进行相对位置的调整,在小区域范围内具有导航精度高、实时性好的优点,其作业效果受到光线影响较大,目前该方法主要应用在无人机的避障导航与精准施药上。除单双目相机外,雷达传感器可获取无人机周围的二维信息,雷达穿透雾、烟、灰尘的能力强,抗干扰能力强[91],与全球卫星定位系统相互配合,可达到良好的导航效果,雷达传感器的成本较高,目前,以T16型大疆植保无人机为代表的植保无人机采用雷达传感器与载波相位差分技术进行导航。各导航技术的对比见表4。
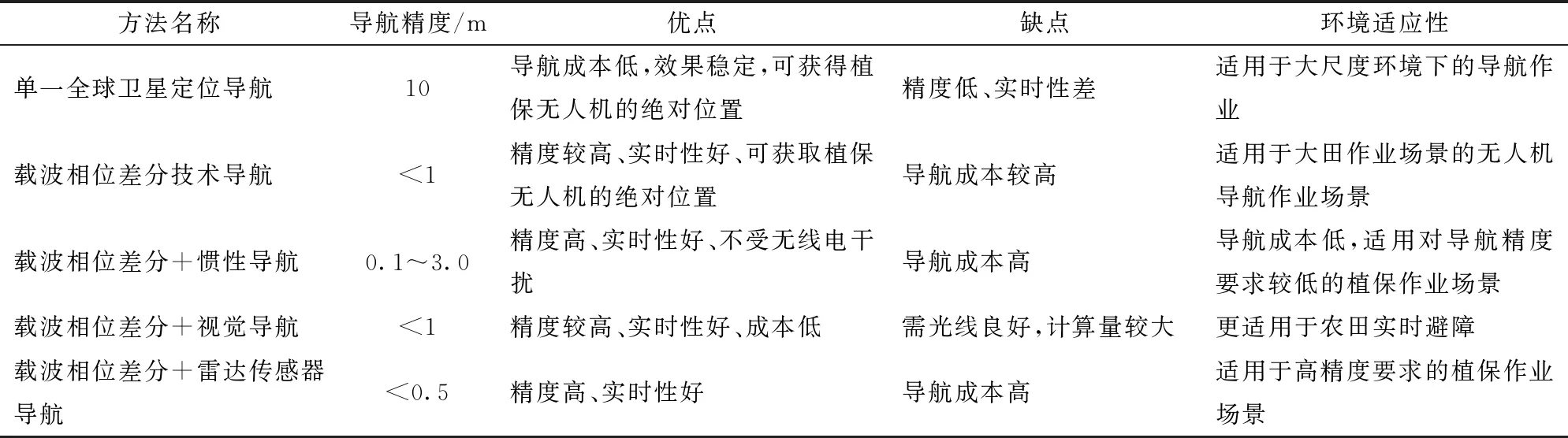
表4 各导航技术性能对比Tab.4 Performance comparison of various navigation technologies
3 单机作业航线优化策略
3.1 航线规划基本方法
随着无人机导航及控制技术的进一步成熟,植保无人机自主作业成为发展趋势,植保无人机的作业时长受到无人机的电池容量、载重能力、地块地形、作物种植农艺等因素的约束。衡量无人机航线优劣的主要指标有非植保作业时间、能量消耗、路程、植保作业的覆盖率和遗漏率,在多个约束条件下,进行各指标的总体寻优成为植保无人机航线规划的目标[92]。常采用基于空间搜索的智能算法如遗传算法、粒子群算法、引力搜索算法、蚁群算法等,均适合于优化航线。
单机多架次航线规划效率主要受到转弯次数、避障策略和补给策略的影响,其中转弯次数受到地形形状与无人机喷幅影响较大。无人机的航线规划是一种全覆盖路径规划,其规划基础为牛耕往复法或螺旋法[92]。无人机在转弯时不进行喷药,因此无人机的调头次数是影响作业效率和效果的最重要因素,一般情况下,牛耕往复法的调头次数较少,是使用最广泛的航线初始化方法。避障策略、补给策略需根据无人机本身及其他设备的系统情况综合考虑。
3.1.1凸多边形地块的航线规划
凸多边形地块优化是路径规划中较简单的规划场景,其中矩形地块是无人机航线规划中最简单的场景。当地块形状为矩形时,无人机可以选择牛耕往复法和内外螺旋法两种方法进行航线规划,两者都可将地块面积铺满,其方法如图2所示,为减少无人机的转弯次数,一般采用牛耕往复法。
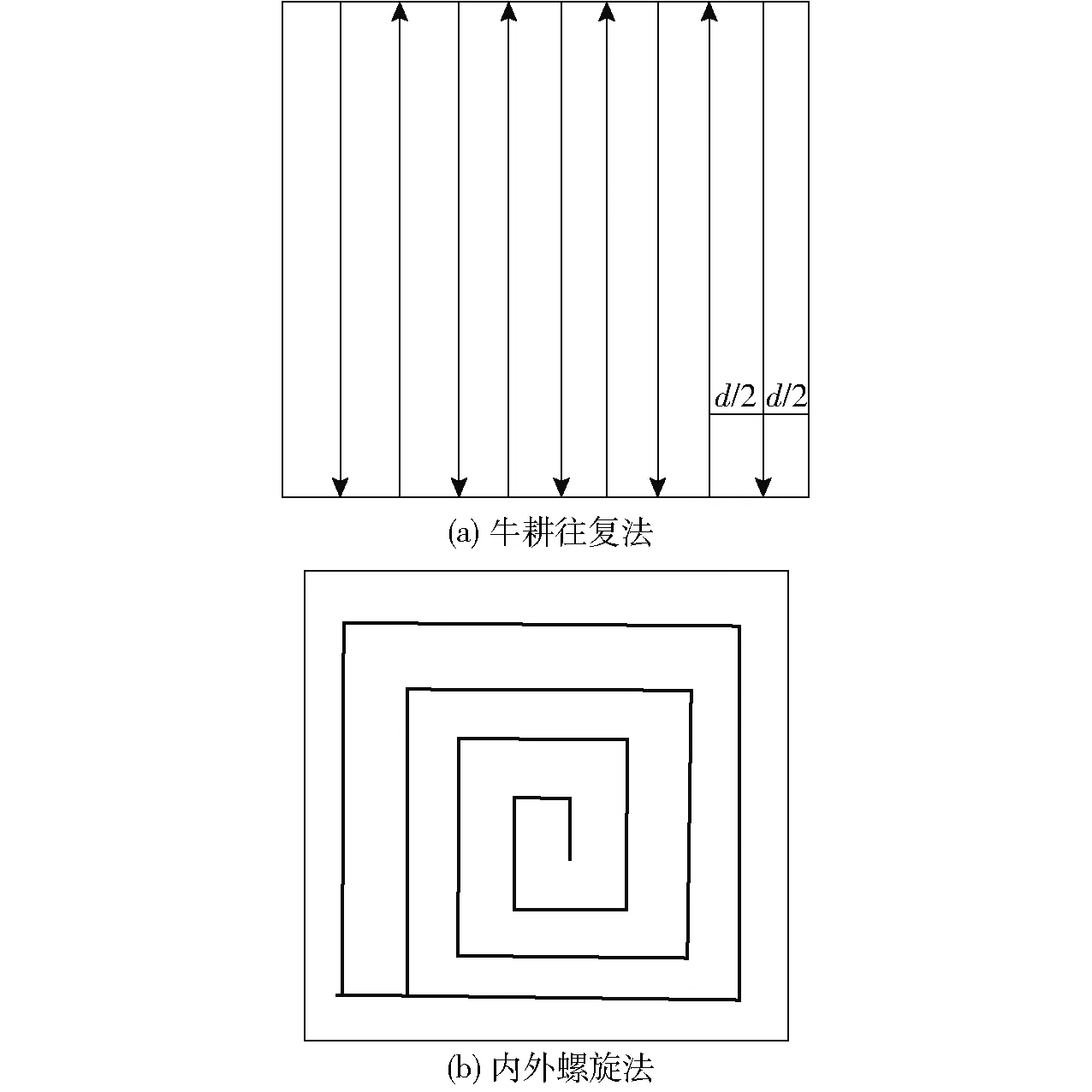
图2 基本地形航线规划法Fig.2 Basic route planning method
对于不规则形状的凸多边形作业区域来说,植保无人机无论沿着何种方向进行作业,都无法保证航线与所有边界都平行,此时使用牛耕往复法会出现多余覆盖现象。为解决上述问题,将凸多边形分割成多个规则的子区域,在子区域内结合地块的形状特点分别进行航向角的寻优和飞行航线规划。除此之外,栅格法也是常用的方法,通过栅格点位置判断该条航线的终点,在此基础上使用启发式算法进行飞行路径的优化搜索[92]。徐博等[93]提出构建高斯投影环境坐标的方法进行坐标系的转换,通过改变坐标原点,对植保无人机的航向角和航向路程进行寻优,多余覆盖率最低可达到2.8%。VOLKAN等[94]使用振动遗传算法对凸边形的无人机飞行路径搜索,加快了算法搜索效率。MORBIDI等[95]首先构建基于点对点的最小燃油消耗表,使用遗传算法对轨迹连接顺序进行寻优,构建出油耗最小的航线规划模型。
3.1.2凹多边形地块的航线规划
凹多边形的航线规划思路为将凹多边形转换为多个子凸边型,确定子凸边形间的连接权值,在各个子凸边形内进行航线规划,最后通过优化方法找到各个子凸边形航线的连接顺序,达到无人机在能量、时间消耗最小的目的[96]。王宇等[97]将栅格和引力搜索算法结合,通过栅格附加移动权值,以非植保作业时间最小为目标,运用引力搜索算法进行飞行路径寻优。黄小毛等[98]使用多边形分组法将不规则地块的地形快速分类,活性边表法进行航线初始化,引入贪婪算法、凸多边形最小跨度法和步进旋转法,综合进行航线排序优化和航向优化。
3.1.3三维地形地块的航线规划
三维地形的航线规划方法可分为两类,第1类为没有提前获得地块高度变化信息,通过增加RTK、激光等模块实时获取作业地块的地形高度变化,调整无人机飞行高度的方法达到无人机的实时避障和航线遍历,此方法一般不能在油量和时间消耗上做到全局最优。陈广大等[99]研究了我国南方丘陵梯田等复杂地形的无人机路径规划方法,以牛耕往复法为航线规划基础,使用RTK模块实时定位飞机位置,使用激光测距测量飞机与田面和田壁的距离,调整飞机高度,实时采集飞机下方的图像,判断无人机是否需要喷洒药物,达到了避障和变量施药的要求。另一类方法为提前获得地块的三维地图信息,根据三维地图信息计算植保无人机的飞行航线长度,进行飞行路径与航线角的规划,王宇等[100]根据提前获取的农田规模、形状、高度起伏等三维地理环境信息,对农田进行栅格化处理,构建寻优模型,对无人机的飞行航线和航向角进行规划。王宇等[101]提出了一种基于改进的蚁群算法的植保无人机路径规划方法,适用于多个具有复杂多边形边界与内部障碍物的三维作业区域,改进的蚁群算法所得的转移路径总长度均较短,比贪婪算法所得结果短3%~28%。
3.2 避障策略
植保无人机作业区域经常出现高压输电线、照明设施等障碍物,无人机的智能避障策略是无人机自主作业的重要因素。农用无人机避障首先需要分析和识别农田障碍物的类别,进而进行障碍物的距离测算,在此基础上确定该类障碍物的避障策略。兰玉彬等[102]将农田中的障碍物按照大小和距离进行分类,通过统计分析指出对微小障碍物躲避不及是导致无人机“炸机”的最常见的原因。
3.2.1障碍物识别与探测方法
机器视觉方法是植保无人机作业过程中重要的障碍物识别、探测方法,根据传感器中相机的个数,可分为单目、双目相机。基于单目视觉的机器视觉方法具有硬件结构简单、数据处理方法成熟、运算速度快的优点,可快速识别障碍物的种类从而进行障碍物预警[88]。双目视觉方法可直接获得目标场景的深度信息,除识别障碍物种类外,可探测无人机与障碍物的距离[90]。但农田作业环境中的粉尘和光照对数据采集影响较大,影响避障效果[102]。超声波法可在光线不足或粉尘环境中工作,但测距范围小,易造成无人机避障不及时的情况[103]。激光传感器可获取高精度的目的地区信息,激光传感器造价高,抗干扰性强,但作业效果易受到粉尘影响,目前不适用于植保无人机作业[104]。雷达传感器可获取无人机周围的二维信息,与激光传感器类似,高精度雷达避障传感器造价高,受限于传感器价格,目前采用该技术且能够达到实时避障的无人机产品较少[91]。
与导航定位技术类似,使用单一传感器和方法进行避障的方法都具一定局限性,目前大疆和极飞等公司的植保无人机产品将主动近红外技术、雷达和图像采集等模块集成在无人机上,将多种传感器和数据处理方法融合进行避障,使得植保无人机在作业地块地形变化、光照不足等复杂农业作业环境中达到较好的避障效果[105-106]。
3.2.2含障碍物区域的航线规划方法
含障碍物区域的航向规划增加了障碍信息的三维地形规划场景。其航线规划思路可分2种:①在已知地块的三维障碍信息的基础上,通过绕行障碍物或提升飞行高度的方法进行障碍物躲避,将原二维路径权重改为躲避障碍物的路径权重,在此基础上,使用启发式算法或传统优化算法对飞机的飞行路径进行优化[107-108]。②可通过栅格化方法将作业地块分为有障碍物与无障碍物的栅格,获取无障碍物栅格间的连接代价,绕行障碍物栅格,通过构建连接模型,确定无人机的飞行航线。徐博等[92]使用梯形单元分解法和莫尔斯单元分解法将含障碍物的地块划分为多个子地块,获取无障碍物子地块间的连接权值,使用Fleury算法求解该图的航线。金泽选等[107]采用“Z”型扫描,快速反复遍历得到无人机的作业路径,采用局部规划算法将含障碍物区域分为点状障碍和区域障碍物。严炜等[108]基于改进的退火算法提出了一种适用于内含障碍物农田植保无人机路径规划方法,可实现航向角的优化。杨泽等[109]设计了一种高效可靠的无人机植保作业电子围栏,能够实时检测无人机是否越界,保障植保无人机的飞行安全。
3.3 能量和药液补给策略
3.3.1补给方法
植保无人机的自动补给平台是提升植保无人机作业效率的重要环节。目前,植保无人机受到电池技术制约,持续航行时间和载重能力有限,电池和药液补给都靠人工手动完成。研发植保无人机的自动补给平台能够提高植保无人机作业的效率,提升作业效果。祖林禄等[110]研究了农用无人机跟踪降落算法,该算法能够将农用无人机对移动补给平台的跟踪误差缩小到6.7 cm以内。
3.3.2基于补给策略的无人机航线规划方法
在大田作业场景下,若作业区域面积较大,单次植保作业无法满足作业要求,需要多架次无人机往返作业。在进行植保无人机的作业航线规划时,需综合考虑无人机的飞行距离和剩余药量、多个无人机间的协作情况,在优化目标函数中增加无人机的补给时间、能量消耗和等待时间等因素,达到优化补给站位置和植保无人机作业路径的目的。一般使用栅格法将作业区域分割开,将问题转换成旅行商问题,使用启发式算法进行飞行路径寻优[111-112]。为符合无人机作业的实际场景和实际经济和作业价值,李继宇等[113]将无人机之间的作业间隔条件加入到约束条件中,将补给消耗时间、能量加入到优化目标中,使模型更具有实际应用意义。
4 多机群航线规划策略与调度
多无人机调度技术是无人机系统完成决策、提供方案的关键步骤[114-115]。植保无人机群的调度和航线规划策略是提高植保无人机群作业效率的重要环节。JU等[116]开发了一个模拟多无人机调度系统,分析该系统的性能,并与单无人机系统进行比较,经过定量评估和分析,证实了多无人机系统性能优于单无人机系统。
无人机群调度技术的研究热点为:无人机的状态感知和数据融合、任务分配和航线规划、编队控制和通信组网等多个技术,研究多项技术间的协同作用[117]。目前多无人机协同技术主要包括信息感知技术、数据融合技术、任务分配技术、航线规划技术、编队控制技术、通信组网技术和虚拟/实物验证试验平台技术等。
4.1 多机群航线规划约束条件与优化目标
无人机群调度需要在相关约束条件下对优化目标进行寻优。其中车辆调度中关于调度的定义较多。当前作业环境类似交通运输场景,农业设备调度含义可以借鉴车辆调度的概念,类比得到无人机调度过程:单台或多台植保无人机在约束条件下,对待覆盖区域(作业区域)进行遍历作业,使得总体性能指标最优。无人机调度主要涵盖了无人机作业分配调度及航线规划调度两方面内容。基本的约束条件如表5,优化目标如表6所示。
4.1.1无人机群静态航线规划方法
多架相互协作的无人机可以用于执行多种不同类型的任务,它们具有不同的约束条件和不同的任务目标[118]。以植保为目的的机群协同作业是其中一种,并随着近几年无人机在农业上的广泛使用而受到重视。多无人机协同作业也要为每一架无人机规划符合约束条件的可行飞行航线,但对每一架无人机自身而言不一定最优,为保证飞行安全,无人机之间需保持一定高度约束。
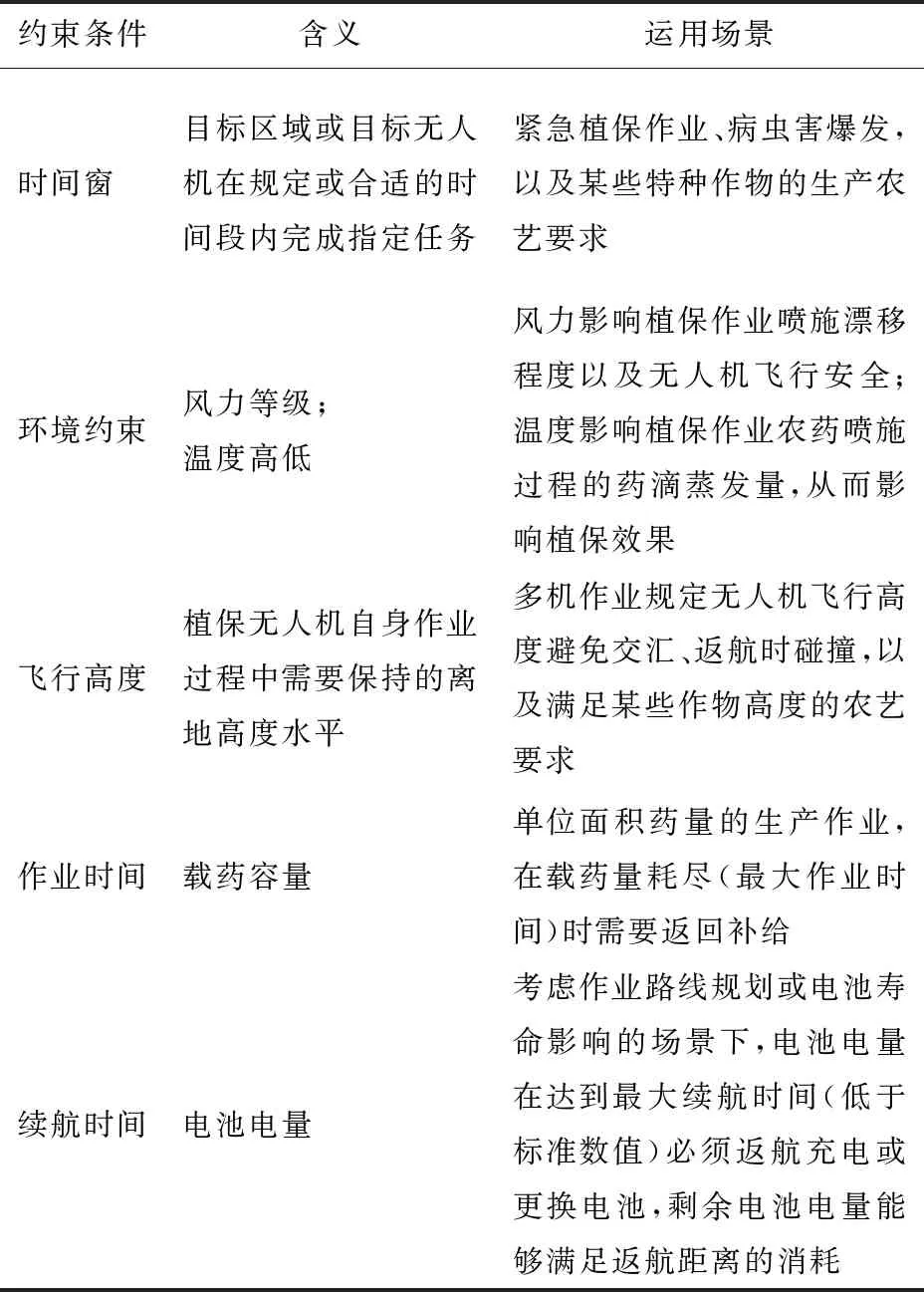
表5 无人机群常用调度约束条件Tab.5 UAVs scheduling constraints
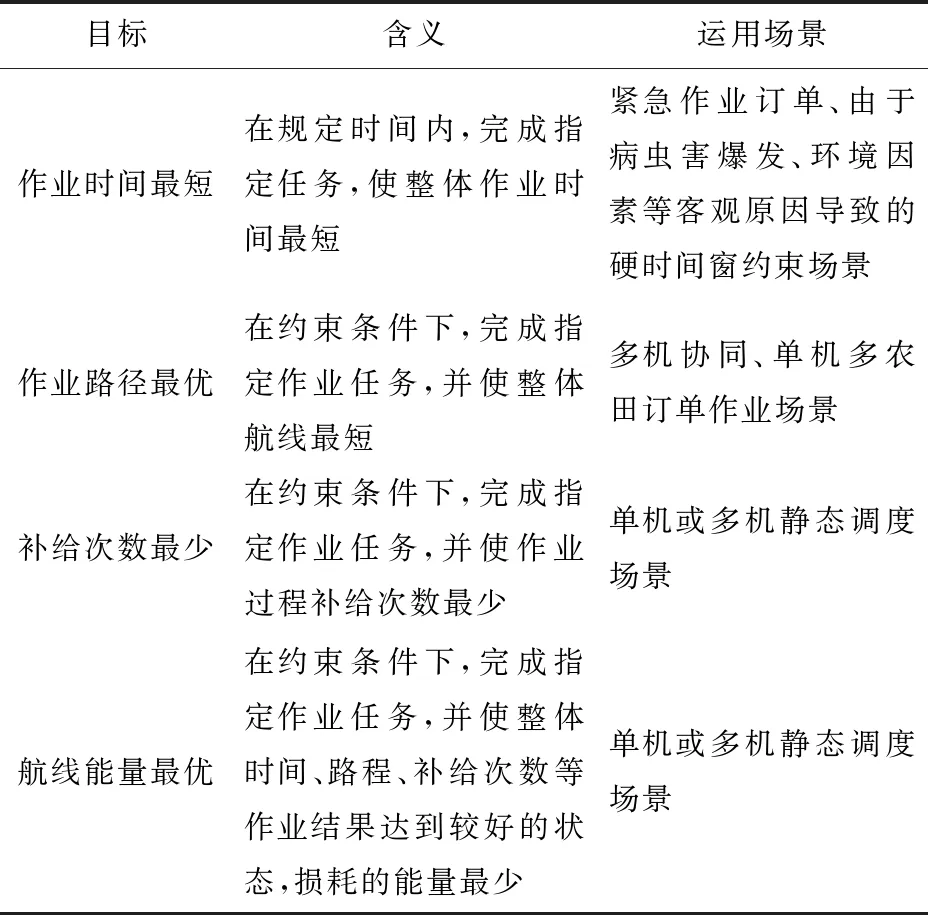
表6 无人机群常用调度优化目标Tab.6 UAVs scheduling optimization goal
植保无人机群的航线规划分为两种:一种是多种无人机的航线规划;另一种为无人机与其他作业机械的联合作业航线、路径规划。前者场景是:当无人机作业区域分布较为集中时,无人机可以直接飞到指定区域进行作业;后者场景是:当无人机作业区域分布较分散且距离较远时,使用运输车辆(基站)对无人机进行转移和补给(或者是无人机与其它农业设备协作共同完成指定作业),后者属于异质协作,是多机型协同的范畴[118]。
多机协同航线规划:在无人机跨区域调度规划上,基于多农田的植保无人机的航线规划是重要研究方向。多区域的作业规划,不仅包含区域内的作业航线,还包括区域间的航线规划。区域间的作业次序则是跨区调度规划的首要考虑目标。袁利平等[119]考虑在一个大面积作业区域内的多无人机协同作业,采用栅格法生成各区域全覆盖作业航线,以各架植保无人机的作业距离为寻优变量,采用了粒子群算法实现路径规划,同时兼顾了无人机补给时间间隔与飞行时安全空间间距,表现出很强的作业区域适应性。针对多植保无人机在大面积作业区域下的任务分配问题,徐正伟等[120]提出了一种基于改进遗传算法的多植保无人机航线规划方法。国外研究人员开发出了一种基于多无人机的自主精准农业系统[121],并描述了系统设计的模型驱动框架,讨论了飞行路径规划策略。有研究人员将粒子群优化(PSO)和遗传算法(GA)相结合来解决多无人机系统的任务规划问题[122],工作目标是利用多机系统有效地规划农业任务和合理分配有限的资源。
在多机型协同跨区作业中,区域间的作业次序则是跨区调度的重要内容。针对多机型协同调度,在精准农业监测中,TOKEKAR等[118]研究了空中和地面机器形成共生系统的情况,无人机在无人地面车辆(UGVs)上着陆,UGV在部署点之间运输无人机,使用无人地面车辆(UGVs)进行耗时土壤测量,最小化遍历采样位置和测量时间的总和,同时有限能量的无人机获得最多的空中测量次数,利用无人机与无人地面车辆的组合在各个农业任务中进行了试验,协同作业效果明显(图3)。
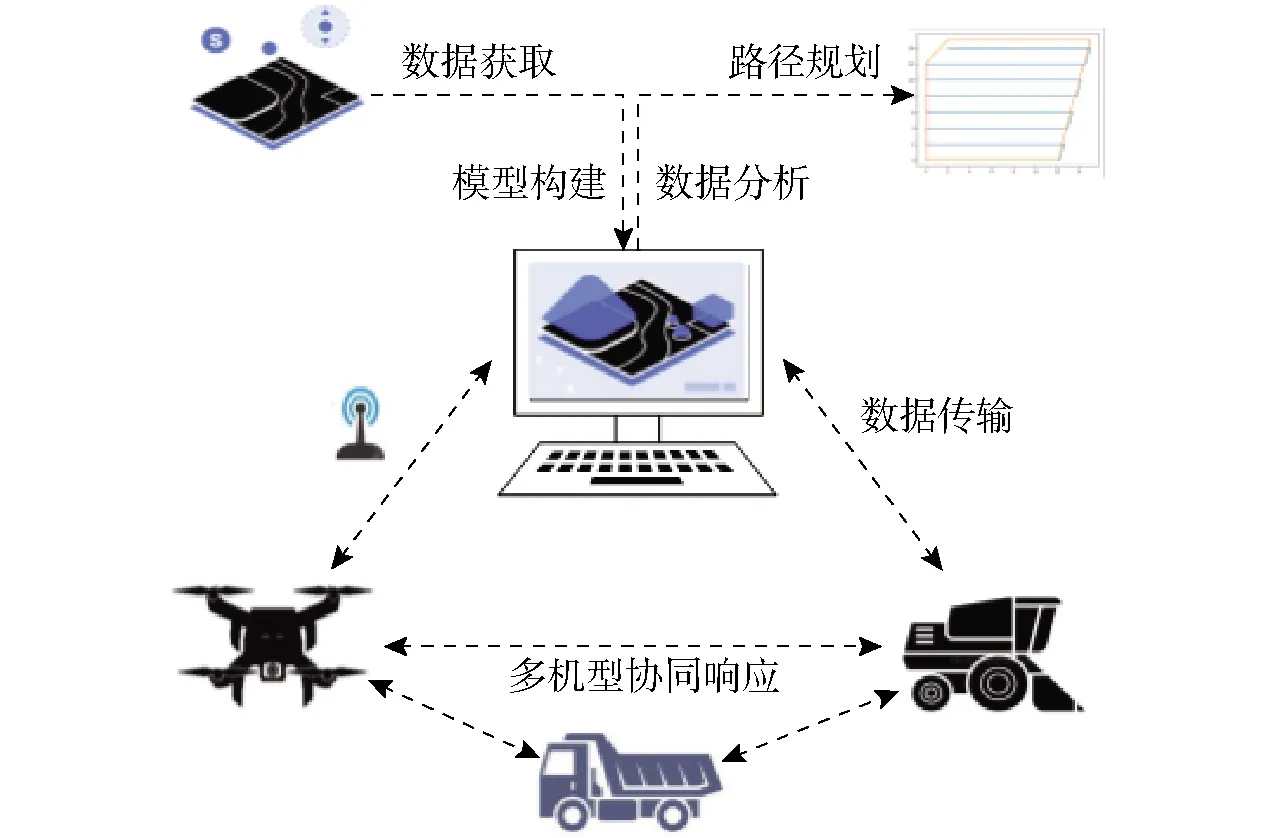
图3 多机型协同作业航线路径规划Fig.3 Route planning for cooperative operation of multiple machineries
4.1.2无人机群动态调度航线规划方法
植保无人机的航线动态规划是实现无人机群智能飞行与调度的基础,是一个动态多目标优化问题[123-124]。无人机智能作业的关键是对环境变化做出反应的能力,使其能够有效、准确地适应作业环境。
目前最流行的在线航线规划算法是基于遗传算法(GA)和线性规划(FL)。TAROKH等[125]提出了一种两个阶段的遗传算法来解决全局及局部规划问题。局部规划使用感官信息作为输入,一旦检测到之前未知的或未遇到的障碍,它就会执行在线预先计划,以绕过新发现的障碍。WANG等[126]提出了一种基于PSO算法的多合作无人机静态路径规划与动态路径规划相结合的方法。DONG等[127]提出了一种新型的模糊虚拟力法,该方法具有固定的步长,能够满足在线无人机航线规划的实时性要求。
4.2 无人机群作业订单管理
无人机群的作业调度是在无人机群路径规划的基础上,根据植保无人机服务提供商的作业模式进行地块-订单匹配搜索与订单管理的相关优化。在约束条件与优化目标上,增加了订单与地块的匹配量化模块、用户服务等待时间与病虫害紧急程度等要素,使无人机调度优化模型更有实际应用价值。
针对订单模式的离线无人机任务分配的研究中,杨泽等[128]提供了无人机与作业田的匹配算法,属于无人机订单分配的调度规划。采用R树空间搜索算法在地理信息系统中快速检索符合无人机作业特点的地块信息。该算法有一定局限性:其对象仅限于地理区域,反馈内容是地理图形和区域信息,该方法适用于离线搜索。曹光乔等[13]面向植保服务订单,按照病虫害等级、作业时间窗长度、作业面积大小的优先策略进行订单排序,再利用改进的遗传算法得到多个飞防队的无人机在不同农田的匹配次序与转移路线。该方法将飞防队为单位的车辆无人机运输和订单匹配,实现了多无人机多地块有时间窗约束的路径规划。针对多区域的作业规划,不仅包含区域内的作业航线,还包括区域间的航线规划。区域间的作业次序则是跨区调度规划的首要考虑目标。针对多植保无人机在大面积作业区域下的任务分配问题,徐正伟等[120]结合任务分配的条件约束,建立多植保无人机作业时间最小为目标的任务分配模型,并提出了一种改进的遗传算法,引入启发式初始化准则和自适应遗传算子对问题进行求解。
由于无人机作业订单模式出现时间较短,作业模式与作业内容尚未形成标准,面向植保无人机群作业订单的研究较少,合理安排订单作业顺序可有效提高作业效率,提升用户满意度,因此面向动态订单制度的植保无人机机群调度和航线规划方法将成为研究热点。
5 总结与展望
(1)无人机用于大田植保作业已成为主流技术,本文从无人机飞行控制、单机航线规划、多机协同作业场景等方面进行相关应用技术综述,并提出发展趋势。
(2)在飞行精度控制与安全控制方面,主要存在以下问题:无人机普遍使用的消费级MEMS器件测姿精度较低;对微小障碍物的探测效果不稳定,需手动标定障碍物位置,实时避障效果欠佳。针对以上问题,结合植保无人机的使用受众特点,应进行以下研究:①研发低成本、高精度MEMS测姿器件,测量精度达到战术级别。②研究植保作业对姿态信息的要求,并针对植保无人机的飞行特点和干扰环境设计最适合的姿态估计算法。③针对载机自身参数变化快、外部干扰多的问题,在载荷多变或不确定性外界干扰因素叠加情况下,研究无人机姿态动态控制方法。④研发针对微小障碍物的低成本、高稳定性硬件及配套系统,以提高植保无人机自主作业的安全性能。
(3)在单机作业路径规划、多机协同作业场景策略方面,主要存在以下问题:航线优化模型理想化,优化目标、模型约束条件与实际生产有一定差距;针对植保作业过程中的订单分配管理、多机型无人机、多类型农机联合调度的优化模型研究较少。应进行以下研究:①结合植保无人机的实际生产环境约束与需求,建立植保无人机的订单管理与单机作业航线优化模型。②将植保无人机作业过程作为系统工程考虑,研发自动补给平台;考虑建立多机、多型号无人机协同作业、无人机与其他农机协同作业的优化模型,以提高复杂环境下作业的可靠性,提高植保作业效率。
猜你喜欢
今日农业(2021年17期)2021-11-26
天津农林科技(2021年2期)2021-04-16
小哥白尼(神奇星球)(2021年12期)2021-03-08
中国品牌(2020年4期)2020-11-16
今日农业(2020年18期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10