机器人与三维激光扫描仪在矿井地质测量中的联合应用
2020-08-21 05:22石磊
机械管理开发 2020年7期
石 磊
(山西宁武大运华盛老窑沟煤业有限公司, 山西 宁武 036700)
引言
一直以来,煤炭安全生产备受煤矿企业和工作面作业人员的关注。尽管在锚杆+锚索+金属网的联合支护和液压支架的支护下,煤矿生产的安全性得到显著提升,但是,在日常生产中仍会有矿难的发生[1]。不仅矿井的安全巡检、发生事故后的灾后处理和搜救任务需耗费大量的人力物力,而且工作面的有些位置作业人员无法到达可能造成二次伤亡。为此,应将机器人和三维激光扫描仪集成为一体应用于矿井地质的测量、巡检和搜救等任务。
1 机器人系统的总体设计
机器人主要由于其体积小、行动方便的优势可达到作业人员不能到达的位置。而且,在机器人上安装各种传感器实现对周边环境的监测,通过所监测到的数据完成对环境的评估、定位被困人员等任务。
1.1 机器人的设计要求
要求机器人在恶劣的环境下灵活运行,并能够实现自由转弯;当机器人在行走过程中遇到障碍物时能够自由通过;要求机器人能够长时间在工作面工作;鉴于机器人的结构紧凑,能够通过狭小的空间,且耗电量小。针对机器人的控制主要采用无线遥控控制的方式;基于自身的导航功能,实现自主巡检;具备有较强的抗冲击能力和防雨、防尘功能[2]。
1.2 机器人机械结构的设计
机器人行走系统可采用轮式、履带式和腿式等。其中,轮式行走系统的效率高,但是适用性较差;腿式行走系统适应能力强,但是其效率低[3]。借鉴坦克的行走系统,针对机器人同样采用履带式行走系统。机器人的履带行走机构如图1 所示。
此外,为保证机器人能够实现360°的转弯,为机器人左右两侧的驱动轮采用差动转向的方式;为确保机器人的动力十足,机器人采用后驱的方式,且驱动动力为驱动电机所提供。
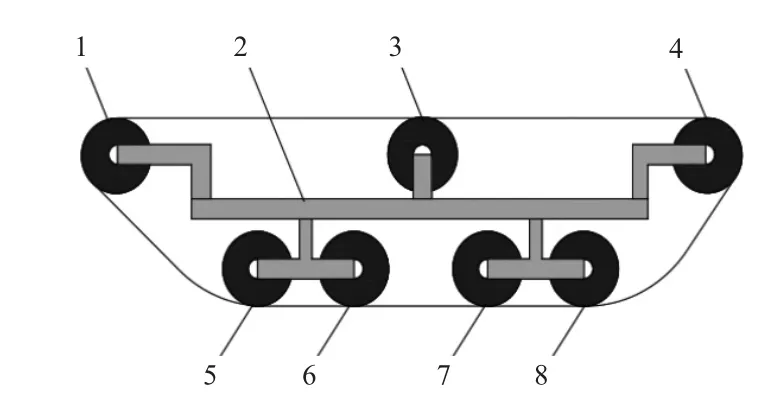
图1 机器人履带行走结构示意图
1.3 机器人控制系统的设计
若要使机器人能够在工作面上自主运行并完成搜救、测量和灾后处理等任务,需为机器人安装导航系统和可对周边环境监测的传感器。因此,为确保机器人各项功能的实现,需为其设计有效、可靠的控制系统[4]。简单来说,机器人控制系统包括有主控制器、导航系统和环境监测系统等。根据控制需求,机器人控制系统的原理图如图2 所示。
如图2 所示,机器人的自主导航功能由ZigBee定位系统、惯性导航系统和三维激光扫描仪组成。其中,ZigBee 定位系统主要确定机器人的实时绝对位置;惯性导航系统确定机器人的实时行走状态参数;三维激光扫描仪主要确定机器人与周边环境的相对位置。基于上述三个分系统可实现对机器人的精确导航,从而完成对矿井地质的三维测量任务。

图2 机器人控制系统原理图
2 三维激光扫描仪的设计
2.1 三维激光扫描仪的技术要求
三维激光扫描在机器人上应用的主要功能是确定机器人与周边环境的相对位置,其性能直接决定了机器人相对位置的确定,进而影响机器人的定位精度和自主导航功能。因此,三维激光扫描仪的性能需满足如下要求:
1)要求三维激光扫描仪图像采集的分辨率不低于680×480;
2)要求三维激光扫描仪的测量距离不小于6 m;
3)要求三维激光扫描仪在远距离测量时误差不大于80 mm,测量距离小于1 m 时要求误差不大于5 mm;
4)要求三维激光扫描仪能够实现对周边环境的360°扫描;
5)要求三维激光扫描仪扫描一次所需时间不超过12 s。
2.2 三维激光扫描器件的选型
简答地说,三维激光扫描仪主要由摄像头、滤光片、步进电机以及激光器等组成。根据三维激光仪的技术要求及其工作环境完成对其主要器件的选型[5]。
摄像头的选型:根据三维激光扫描仪的分辨率要求,且具备一定对干扰光过滤的功能,为该扫描仪配置摄像头的具体型号为Sony Effio673CCd。该摄像头具备自动聚焦和逆光补偿功能,且分辨率满足第2.1 节中的技术要求。
激光器的选型:激光器的透射角度为其选型的主要依据是根据三维激光扫描仪的工作环境及任务要求,要求其在透射距离为600 mm 时其激光长度不小于800 mm。因此,在理论结合经验设计的基础上,选用激光器的线角度为110°。
步进电机的选型:步进电机的主要功能是控制摄像头和激光器能够根据扫描任务实现360°的旋转功能。综合考虑成本和性能的基础上,所选型步进电机的型号为57BYGH7630。为满足扫描任务需求,选用与该步进电机相对应的减速器的型号为06AG15。57BYGH7630 步进电机的关键参数如表1所示。
3 机器人与三维激光扫描仪的联合应用效果验证
为验证机器人和三维激光扫描仪将来能够胜任在工作面对地质测量的任务,本文基于所设计的机器人、三维激光扫描仪和相关软件搭建了实验室模型。具体试验步骤为:将所搭建的实验室模型放置于实验室中,并通过步进电机控制摄像头和三维激光扫描仪对周边的环境进行拍摄和扫描,并将拍摄和扫描的数据上传至计算机系统中进行处理,从而得出对周边环境重建后的三维模型。针对实验室的楼梯结构所重建的三维模型如图3 所示。

表1 57BYGH7630 关键参数
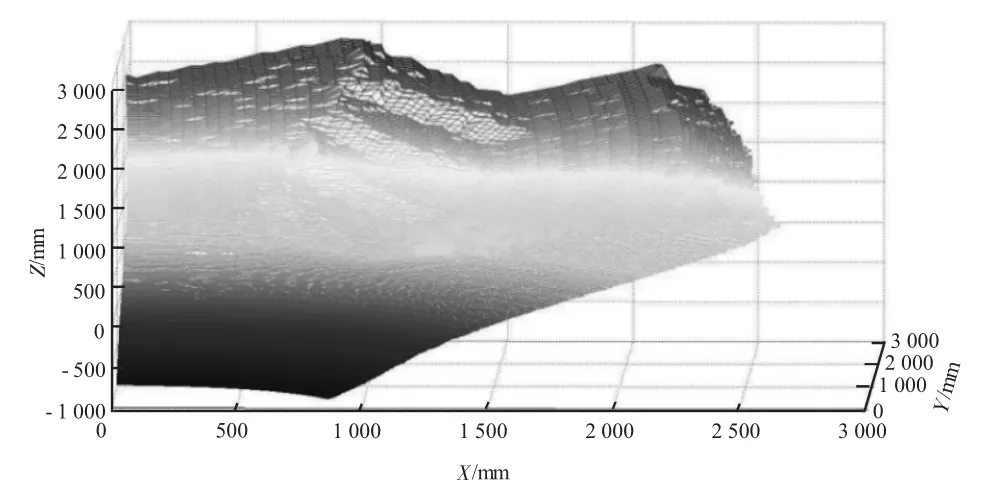
图3 楼梯重建三维模型
如图3 所示,基于机器人和三维激光扫描仪所重建后的楼梯三维模型与实际的楼梯的高度、相对位置等信息一致。即说明,三维激光扫描仪和机器人的联合可应用于煤矿地质的测量任务中。
4 结语
针对矿井地质的测量或矿难发生后的灾后处理及搜救任务,由工程师或搜救人员执行此类任务时存在测量不精确、可能造成二次事故等问题,采用机器人与三维激光扫描仪的联合应用完成对矿井地质的测量或矿难发生后的灾后处理及搜救任务。机器人由于其能够达到人员所不能到达的位置,具有较高的搜救任务的成功率和精准的矿井地质测量精度;此外,机器人搜救不需担心二次事故发生所造成的人员伤亡。因此,可将机器人、三维激光扫描仪在矿井的生产任务中推广应用。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
现代仪器与医疗(2022年2期)2022-08-11
汽车工程师(2021年12期)2022-01-18
一重技术(2021年5期)2022-01-18
建材发展导向(2021年15期)2021-11-05
昆钢科技(2020年4期)2020-10-23
网络安全和信息化(2020年3期)2020-04-20
模具制造(2019年3期)2019-06-06
现代营销·经营版(2015年3期)2015-04-20
汽车维修与保养(2015年8期)2015-04-17