基于分段波形互相关的井下随采地震数据成像
2020-08-19 06:52张唤兰王保利
煤田地质与勘探 2020年4期
张唤兰,王保利
(1.西安科技大学 地质与环境学院,陕西 西安 710054;2.中煤科工集团西安研究院有限公司,陕西 西安 710077)
煤矿开采前,需对回采工作面和工作面前方的岩体进行超前探测,以便提前识别潜在的危险和问题,采取积极的防治措施。煤矿开采过程中,采煤机或掘进机在切割煤壁时会引起震动,产生地震波。通过在工作面四周布置检波器,接收采煤机切割煤壁时产生的地震波并进行成像,可得到回采工作面及工作面前方的构造以及速度分布,这种方法叫做随采地震勘探。随采地震勘探不需要中断采煤作业,并且在勘探时不需要放炮,避免了在易燃气体存在的环境下使用炸药,提高了煤矿生产的安全性。同时,随采地震勘探具有成本低、可持续监测等优点。1980 年,D.J.Buchanan 等[1]把采煤机切割煤壁引起的震动作为震源进行煤岩体成像的尝试;1990 年开始,E.C.Westman 等[2-3],Lu Bin 等[4]尝试利用采煤机引起的震动作为震源进行地震层析成像,但由于无法确定采煤机的准确位置,使得成像质量不佳;L.Petronio 等[5]研究利用隧道掘进机噪声产生的随钻地震;Luo X.等[6-7]研究了采煤机作为震源成像的可行性;A.King 等[8]通过对采煤机产生的连续震动噪声中每两道数据进行广义互相关,得到有效信号的相对走时,结合实际采煤机位置,进行层析成像;陆斌等[9]研究采煤机震源有效信号的提取和初步应用,并利用地震干涉方法对随采地震进行成像[10];覃思等[11-12]开展随采地震反射波及随采地震井-地联合超前探的试验研究。2019 年,中煤科工集团西安研究院有限公司对随采地震技术的发展[13]、震源模拟[14]、数据采集软件[15]、数据处理软件[16]、数据质量评价[17]、噪声衰减[18]、精细探测方法[19]、地质模型构建[20]等方面做了大量研究。随采地震研究较早,实际应用较晚,近几年才开始发展。由于采煤机震源是连续移动的,且时域信号也表现为连续信号,与传统震源差异较大,因而常规成像方法无法直接应用。因此,笔者通过研究分段互相关来解决采煤机震源问题,并通过互相关方法提取地震波走时,实现对工作面内速度的动态成像,进而得到工作面内应力的动态分布。
1 随采地震数据成像方法
与常规地震勘探不同,随采地震的震源在时间上连续、而在空间位置上则是不断变化的,因此,随采地震数据无法直接利用常规成像方法进行反演成像。通常的方法是通过地震干涉将随采地震数据转换为虚拟共炮集记录,然后再利用常规地震成像方法进行反演成像。
存在的问题是常规地震干涉中震源通常是静止的,对于移动的采煤机震源,地震干涉记录中会包含大量震源混叠噪声。因此,直接进行地震干涉同样也是不可取的。考虑到采煤机通常的移动速度约为0.1 m/s,在可允许的定位误差范围内(比如1 m),认为在对应的一小段时间内(约10 s)采煤机是相对固定的,那么该时间段内的数据即可通过地震干涉获得相应的虚拟记录。
基于以上分析,随采地震数据的分段互相关成像流程如下:
①读入一刀随采地震数据;② 按一定时间间隔将数据分成若干段;③利用互相关干涉分别求取每个时间段内任意两道间的走时差;④ 利用走时差反演获得各检波器记录的绝对走时;⑤ 利用所有时间段获得的绝对走时进行CT 反演,获得工作面内的速度。
2 互相关时间拾取
随采地震数据的震源没有确定的激发时间,并且震源是连续且随机的,按照一定时间间隔将数据分成若干段后,在每一段数据中通过任意两道的互相关来提取有效信号的走时差。
同一震源激发并由不同检波器接收到的有效信号的波形之间具有相似性,通过任意两道记录做互相关就可以提取出有效信号。第i道和第j道信号的互相关函数为:

式中:xi(n)和xj(n)分别表示第i道和第j道随采地震数据;N为道数,也是检波器个数。
3 绝对走时计算
在每一段数据中通过任意两道记录的互相关得到有效信号的走时差后,利用走时差就可以反演绝对走时。两道记录的互相关走时是采煤机震源到这两个检波器的走时差,即:

式中:ti和tj分别是第i个和第j个检波器记录的走时;Δti,j是由互相关得到的时差。写成矩阵形式为:
简写为:

式中:系数矩阵A为稀疏矩阵;Δt为观测数据中任意两道之间互相关得到的时差;t为待求量。
在该方程中加入零均值约束使其非奇异,得到的最小二乘解为:

其中,AT是A的转置矩阵。由于每道检波器记录的信号的能量及信噪比不同,因而,需要对方程进行加权来反映每道记录的质量,这里利用式(1)中计算得到的两道信号的互相关系数进行加权,得到的解为:
英帝国为推行殖民主义政策,毫不掩饰其对中文权威地位的彻底否定,并决心独占描述和解释对外关系的话语权,这岂非语言霸权地位的最佳例证?事实上,英国人包办了解决冲突过程中全部谈判意见的交流及条约文本的翻译,其价值远胜于在《南京条约》中明确加入“以英文本为准”的规定(王健2001:87)。

式中:W为对角加权矩阵,由互相关系数计算得到。通过求解该方程可得到各检波器记录的绝对走时。
4 速度层析成像
根据上述绝对走时计算方法依次得到所有时间段的绝对走时后,对每刀随采地震数据进行速度层析成像,从而获得工作面内的速度。先将一刀数据按照时间分成k段,假设第i个检波器记录的第k时间段随采地震数据地震波走时为,由初始模型计算得到的地震波走时为则:

式中:t0,k为第k时间段随采地震震源的激发时间;Ti,k为地震波从第k时间段震源传播到第i个检波器的时间;o.t.项表示第k时间段观测数据引入的时间误差;v为待成像的速度模型,(xk,yk,zk)为第k时间段对应震源的坐标。

写成矩阵形式为:

式中:x=(δt0,k,δxk,δyk,δzk,δv)T,为待求变量;向量b=(Δt1,k,Δt2,k,…,ΔtN,k)T;N为检波器个数;矩阵B为:
对式(9)进行求解,可得到震源激发时间、位置和速度的扰动值,通过不断迭代,直到计算的时间残差变化量可以忽略,最终得到采煤机震源位置和速度模型。
5 数据测试
5.1 模型数据测试
为验证本文所述方法的可靠性,构建如图1 所示模型,工作面长度为500 m,宽度为100 m,工作面内地震波传播速度为2 000 m/s,工作面内部存在2 个异常体,左边异常体为边长是30 m 的正方体,异常体内地震波的传播速度为2 500 m/s,右边异常体为宽度是20 m 的条带,异常体内地震波的传播速度都为3 000 m/s。采用孔-巷联合观测系统,2 条巷道分别从距离切眼(模型左侧为切眼)10 m 开始布置检波器,各布置49 个,工作面内布设4 个孔中接收排列,分别距切眼100、250、400、495 m,4 个钻孔各布置10 个检波器,检波器间距均为10 m。
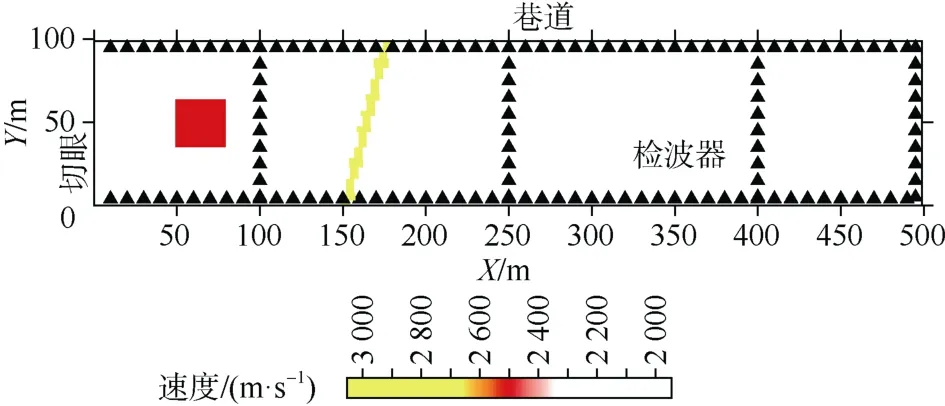
图1 速度模型Fig.1 Velocity model
采用二维声波方程,用时间2 阶、空间8 阶的交错网格有限差分技术进行波场正演模拟,模拟采用的震源信号为10~80 Hz 的带限伪随机噪声序列;震源移动速度0.2 m/min,每刀进尺1 m。
利用本文方法成像结果(图2),对比成像结果与速度模型可以看出,异常体的位置吻合较好,正方体异常的一条边范围略有增加,条带状异常范围与模型基本也是吻合的,表明成像方法是正确的。

图2 速度成像结果Fig.2 The result of velocity imaging
5.2 实际数据测试
以某矿工作面随采数据为例,工作面宽度为200 m,长度为700 m。采用孔-巷联合观测系统,在工作面两侧巷道内各布设24 个检波器,检波器间距为15 m。分别在巷道距切眼110 m 和266 m 处打钻,并在每个孔中安置12 个检波器,检波器间距也为15 m,共计安装72 个检波器进行监测。
在一个半月的监测时间段内,共计进尺110 m,每刀进尺约为0.65 m。由于网络等故障问题,使得有些数据未被采集,有效监测到110 刀,每刀成像一次,即相邻两刀采煤机向前推进约0.65 m,成像结果如图3 所示(隔10 刀显示),图中白色区域右边界为切眼推进的位置。

图3 随采地震成像结果(a—j 为每隔10 刀的反演结果)Fig.3 The imaging results of seismic with mining(a-j are the inversion results every 10 cuts)
图3a—图3j 为每间隔10 刀的成像剖面,每刀进尺约0.65 m,采煤机从左向右推进。成像结果中明显的速度异常有2 处,图3c 中标注的异常1 与矿井物探解释成果(图4)中的异常位置一致,为断层引起的速度异常,且随着采煤机的推进,速度异常区的位置保持不变。图3c 中标出的异常2 推测为应力集中区,随着采煤机逐渐推进到集中区附近,从图3f开始,速度值和异常区域的大小在缓慢减小,表明应力在慢慢释放。
6 结论
a.基于分段波形互相关的速度层析成像方法在随采地震数据的成像上是可行的,模型和实际数据的测试结果都表明其正确性和稳定性。
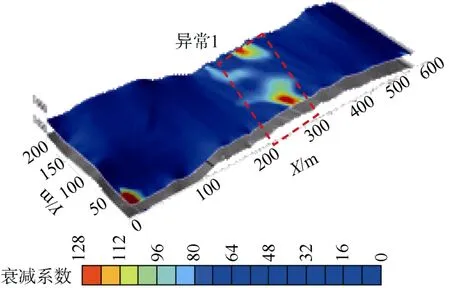
图4 矿井物探解释成果Fig.4 Interpretation of mine geophysical exploration
b.利用随采地震数据成像可以探测工作面内的速度异常区,为地质灾害的预警提供科学指导。
c.下一步工作考虑通过互相关走时和绝对走时相结合来提高采煤机定位精度,从而进一步提高成像精度,更好地为煤矿安全生产服务。
请听作者语音介绍创新技术成果等信息,欢迎与作者进行交流

OSID 码
猜你喜欢
石油管材与仪器(2022年6期)2023-01-03
小天使·初中版(2021年9期)2021-09-18
今日农业(2020年13期)2020-08-24
信息技术时代·中旬刊(2019年1期)2019-10-21
当代陕西(2019年17期)2019-10-08
意林(2017年8期)2017-05-02
医学研究杂志(2015年5期)2015-06-10
中国科技纵横(2014年14期)2014-08-27
中国药业(2014年21期)2014-05-26
意林(2007年20期)2007-05-14