
摄像机脚架水平全自动自平衡调节方法研究
2020-08-18 05:32苏秋仁曾光煜刘智杰
黑龙江科学 2020年16期
苏秋仁,曾光煜,柳 影,刘智杰
(广西大学 行健文理学院,南宁 530004)
0 引言
摄像机脚架是实现高质量拍照和摄影的重要辅助器材,获得广泛应用。当摄影师在拍摄水面、天际线、日出等场景时,需要将摄像机的取景框调整水平,这并非易事,因为现有的许多摄像机脚架需要手动调节水平,而且主要是靠摄影师凭感觉调节,这很考验操作技术与经验。往往摄影师感觉取景框已经调整到水平位置了而实际还是倾斜的,这样的结果就是拍摄效果达不到预期。实现摄像机脚架水平自动调整是急需解决的技术问题。
国内外的研究人员提出了一些解决方法,但要想开发一款能自己平衡的脚架,处于关键部件的直线电机太贵太重,并不适合直接使用。而现有的折中方法是使用摩擦传动的主动轮,通过开环控制来展开,再经过闭环控制平衡。而要真正商业化,直线电机必不可少。开发一款真正适合此项目使用的直线电机,需要大量的时间和金钱,故摄像机水平自动调整问题仍然悬而未决。
针对上述问题,本研究提出一种可以实现全自动自平衡水平调节摄像机脚架的设计方案,设计了一种基于直线电机的全自动自伸缩平衡摄像机脚架。通过摄像机脚架上增加自动伸缩收回机构并辅以配套的平衡模式,利用陀螺仪模块,探测周围环境信息,采用加速度计矫正和卡尔曼滤波后获得稳定的输出数值,实现对摄像机脚架机动模块运动的比例调节控制,以实现摄像机脚架水平调节的全自动控制。实验结果表明,所设计的摄像机脚架可以通过自身的自平衡调节准确停在目标位置,达到了全自动调整水平设计的目的。可为解决摄像机脚架水平自动调整问题提供解决方案。
1 系统设计
设计的脚架主要由三根D型嵌套管脚、管脚驱动座、主控板组(5层)、管脚触底感应器和管脚连接组构成,如图1所示。
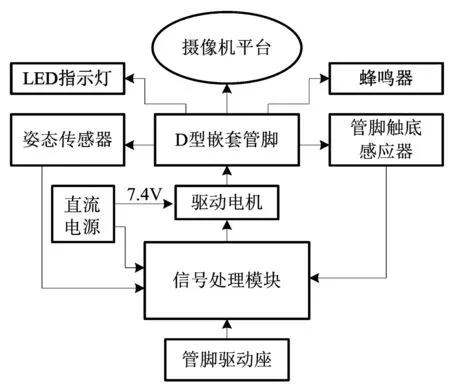
图1 自平衡脚架系统连接示意图Fig.1 Sketch map of self-balancing foot stool system
展开方面。设计采用3根D型嵌套管脚构成展开模块。主动轮由张紧带施加压力加压于D型管脚的平面,驱动D型嵌套管脚直到触底感应器触发,将动力传输到管脚上。所设计的D型嵌套管脚的示意图如图2所示。

图2 D型嵌套管脚Fig.2 Embedded casing feet of D type
平衡部分。采用了姿态传感器,搭棚制造5层pcb控制组。控制组由上到下分别为姿态板、控制板、放大整形板、动作板、电源板。
姿态板使用了jy0901姿态控制器,而控制板用的是arduinopromini,整形板将控制器传输的信号反编译成完整的控制信号,而动作板接受控制信号,驱动电机按照控制板运动,电源板输出稳定的电压电流,减小姿态控制器的误差。
人机互动方面。基于摄影的实用性考虑,取消了原本的液晶屏幕,原因是在实地拍摄中摄影师极少用到这种功能。将人机交互的设计理念定位为“简洁、容易、精致”,仅使用一只LED指示灯来展示各种状态,同时用蜂鸣器提供声音警示信号,实现简单实用的人机交互。
动力部分。使用了丁基橡胶制成的主动轮驱动管脚,在降低成本的同时又保持了机动性,更加轻便灵活。
动力部分。使用了摄像设备兼容的7.4vLiPo电池,可以使用2 s锂电或直接挂载摄像设备的电池,驱动三组6个微型减速电机外加主控,兼容性好。
续航方面。创使了断位处理模式,当自平衡脚架不运行时,将现场保存后完全断电;而当自平衡脚架正常运行时,切换到全功率模式运行。这种设计,可以大大降低耗电,提高自平衡脚架的续航能力。
2 自动控制方案
程序处理方面。使用了主从系统模式,将整个脚架的电控系统分为主CPU、动控和姿态传感器等。平时待机情况下只有主CPU维持这最低限度的响应,当用户需要脚架活动时,再由主CPU唤醒电控和姿态传感器,从而达到省电目的。
算法方面。通过解算出欧拉角,将pitch角和roll角融合后分配给三根管脚。为了提高运行速度,本设计将PID控制省化,放弃使用姿态传感器回传的yaw角,减少CPU的运算负荷。
动力部分。使用7.4vLiPo电池,驱动3组6个微型减速电机外加主控,计算使用电流工作时0.5 A,待机时30 mA,睡眠时100 uA,运行时长5 h,待机时长17 h,睡眠时长300 h。
主控单元。使用arduino的promini开发板作为运算以及输出控制量,tb2200电机控制器接受控制量后驱动电机运行,jy90三轴模块负责输出信号反馈姿态给主控,同时有一块稳压板负责提供平稳的电压,维持主控部件正常运行。
触底感应部分。采用塑封的微动开关设计,当地脚触碰到地面后,反馈信号给主控。
使用直线电机来控制整个机架的展开和收回,这种设计的好处是动力强,运行控制准确且噪声小。不足之处是功率较大,导致续航下降,且成本偏高。
3 实验结果及分析
通过搭建实验平台,对本次制作的水平自平衡脚架样机的性能进行了实验研究。
实验结果显示:
功能上。所设计的水平自平衡脚架实现了水平全自动自平衡调节功能,可以通过自身的自平衡调节准确停在目标位置。
性能上。所设计的水平自平衡脚架工作电流为500 mA、待机电流为30 mA、睡眠电流为100 uA。据此测算出理论运行时长为5 h、待机时长17 h,睡眠时长300 h。
实验结果表明,本次设计的水平全自动自平衡脚架实现了水平自平衡调节的功能,且性能方面可以满足摄像的基本要求,达到了设计目的。
4 结论
针对摄像机脚架难以准确自平衡问题,设计了一种基于直线电机的全自动自伸缩平衡摄像机脚架。通过在摄像机脚架上增加自动伸缩收回机构并辅以配套的平衡模式,利用陀螺仪模块探测周围环境信息,采用加速度计矫正和卡尔曼滤波后获得稳定的输出数值,实现对摄像机脚架机动模块运动的比例调节控制。实验结果表明,所设计的摄像机脚架可以通过自身的自平衡调节准确停在目标位置,达到了全自动调整水平设计的目的,可为解决摄像机脚架的水平调整问题提供解决方案。
猜你喜欢
电子制作(2021年21期)2021-11-10
空军工程大学学报(2021年4期)2021-09-23
计算机与数字工程(2019年4期)2019-05-07
电影文学(2017年24期)2017-11-16
现代职业教育·中职中专(2017年2期)2017-08-13
金融经济(2017年7期)2017-07-15
大众理财顾问(2016年9期)2016-10-11
摄影之友(2016年8期)2016-05-14
摄影之友(2015年9期)2015-11-18
摄影世界(2015年1期)2015-03-16
