
船载经纬仪俯仰轴系防水动密封设计
2020-08-13 02:16:26邓健
机电产品开发与创新 2020年4期
邓 健
(中国科学院 长春光学精密机械与物理研究所, 吉林 长春 130033)
0 引言
船载经纬仪作为陆基靶场测控的补充和延伸, 可有效提高测控任务中布站的范围和灵活性, 满足大型航天发射任务的需要。 由于船载经纬仪要求在复杂的海洋环境中工作,在遇到暴风雨等突发恶劣天气情况时,如果经纬仪防护圆顶关闭不及时, 可能出现雨水或海水冲击或侵蚀光学设备造成严重的损坏, 因此在船载经纬仪在设计中应重点考虑防水密封性设计。
1 经纬仪俯仰轴系结构
俯仰轴系是地平式经纬仪跟踪架的重要组成部分,是光学系统安装承载平台,其结构如图1 所示。由于水平轴与四通连接并随其旋转,贯穿了两侧的立柱,因此此处的配合间隙需要进行动密封设计。 由于立柱内的空间较小,不利于密封结构的排布。并且密封结构受到外侧电机和编码器遮挡,无法打开进行维修和更换。这就要求密封结构具有高可靠性和较长的使用寿命, 因此俯仰轴与立柱之间的旋转间隙就成为了俯仰轴系的防水密封设计的难点。 本文根为解决上述问题,提出了一种俯仰轴系动密封装置。
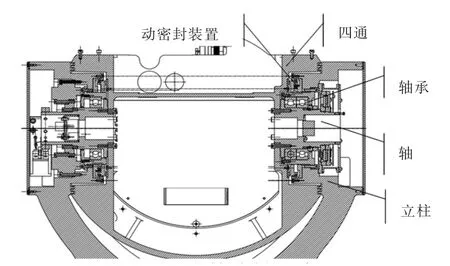
图1 经纬仪俯仰轴系结构示意图
2 设计工况参数
设计参数如表1 所示。

表1 设计工况参数
3 总体密封方案的确定
俯仰轴系的防水密封设计, 重点是解决回转轴系的动密封问题。 旋转轴动密封装置可分为接触型密封和非接触型密封两大类[1]。 常见的接触型旋转密封包括合成橡胶唇形密封、 聚四氟乙烯唇形密封、O 型圈密封、机械密封等;非接触密封包括间隙密封、迷宫密封等。基于俯仰轴系的结构特点,我们选择机械密封为主,迷宫密封作为辅的动密封方案,密封垫和密封圈作为静密封,其结构如图2 所示。机械密封的优点是密封性能可靠,能承受较高的压力;使用寿命长,而且运行中基本不需要维护和修理,摩擦力矩小等。迷宫密封的作用是降低海浪的冲击压力,减少灰尘等杂质的进入,同时并不会增加俯仰轴系的摩擦力矩。
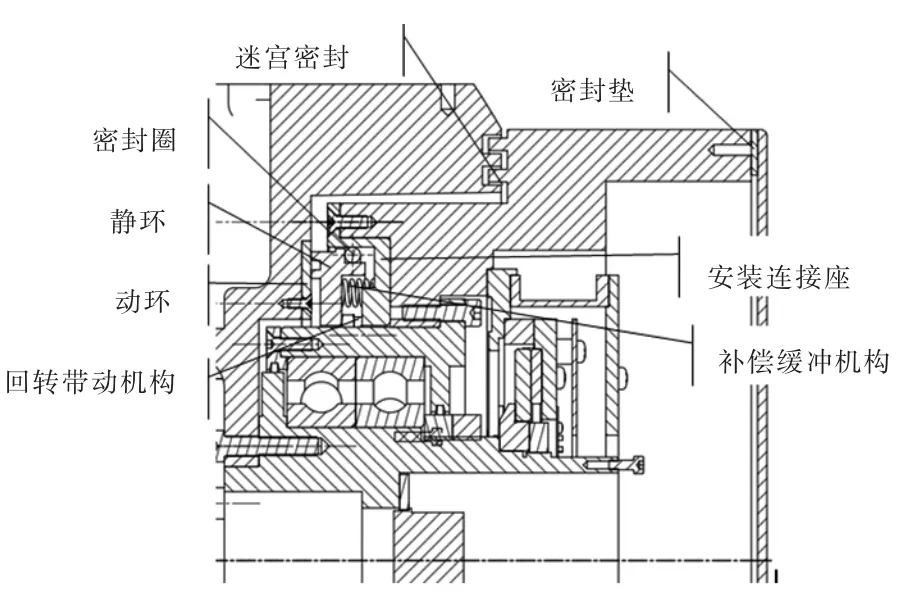
图2 动密封装置结构示意图
4 机械密封设计
机械密封是指在密封流体压力和弹性元件压力的作用下, 使密封动环和静环接触面之间产生一个初始接触应力,阻止流体产生泄漏的装置。本设计中的机械密封装置主要由密封摩擦副、补偿缓冲机构、辅助密封圈、回转限位机构等部分构成[2]。在结构布局上将机械密封装置设计到轴承的外侧,节省了轴向安装空间。
4.1 密封摩擦副材料的选择匹配
虽然经纬仪俯仰轴系的工作时长短、转动速度很低,但是为了保证光学系统的清洁,无法使用油液冷却润滑,机械密封装置始终处于干摩擦状态, 这就要求密封摩擦副材料具有较低的摩擦系数和较高的导热和耐热性能。因此本设计中选用碳化钨硬质合金做为动环, 浸树脂碳石墨材料作为静环。浸树脂碳石墨具有自润滑性,再对二者配合端面进行研磨加工, 可保证其具有较低的摩擦系数。 同时他们都具有优良的耐磨性、耐热性和耐腐蚀性,具有较长的使用寿命[3]。
4.2 设计选型
补偿缓冲机构的作用是通过弹性元件为机械密封摩擦副提供合理恒定的端面比压,对密封面的振动、磨损和安装误差起到补偿缓冲作用,提高使用寿命。本设计中选用多弹簧结构,使密封端面的受力与变形更加平滑。
为防止机械密封动环和静环与安装轴(座)之间发生泄漏, 必须在相应位置设计硅橡胶密封圈密或密封垫作为辅助密封。 它具有弹性恢复力强、耐腐蚀等优点,可以补偿密封接触面的磨损和轴的转动不规则。
静环一般采用浮动支撑, 因此需要设计一套具有一定自由度回转限位机构。本设计中选用球头柱销机构,它的优点是在动环旋转摩擦力矩的作用下只产生切向力,减少静环振动或倾斜而造成的泄漏。
4.3 摩擦副尺寸参数的确定
通过合理的设计摩擦副的尺寸参数,可以提高机械密封的密封性能和使用寿命。机械密封设计中通常将硬度低的材料做成窄环, 这样可以减轻软材料在运动过程中的磨损程度,提高整体的使用寿命[4]。 窄环的端面宽度b 和高度h 是重要的参数,主要由材料的强度、刚度以及耐磨损能力确定,通过查手册确定本设计中b=6mm,h=3mm。
动环与静环之间的间隙应合理选择, 既能作为定位配合,又要容许温升后的形变。本设计中静环与轴的间隙取3mm,动环与轴的间隙设计为1mm。
5 机械密封性能仿真分析
机械密封在工作中, 摩擦副在流体压力和摩擦作用下会发生变形而产生泄漏。 而机械密封的变形多发生在硬度较低的浸树脂石墨环上, 因此我们着重对其进行分析,该材料的参数见表2。

表2 碳石墨静环材料参数
5.1 温度场分析
由于干摩擦机械密封工作过程中会不断产生热量,使密封端面产生热变形, 因此我们首先对动环进行热分析,求出它的温度场分布。 为简化热分析边界条件,在分析中假定动环与静环、静环与轴的接触边界绝热,只考虑摩擦产生的热流密度以及静环与密封介质的对流换热。摩擦产生的热流密度可由经验公式(1)近似计算;静环环与密封介质间的对流换热系数可由公式(2)计算[5]。 设环境温度为20℃, 热分析边界条件施加方式和温度场计算结果如图3 和图4 所示。


图3 碳石墨静环的热分析边界条件施加方式
式中:qr—密封端面摩擦产生的热流密度;f—密封摩擦副间的摩擦系数;pcr—密封端面的比压;n—俯仰轴系的转速。

式中:Rec—密封介质旋转搅拌效应下的雷诺数;为Ref—密封介质产生轴向绕流现象下的雷诺数;Pr—普朗特常数;d—静环外径;λ—流体的导热率。

图4 碳石墨静环温度场分布和温度梯度计算结果
由温度场分析结果可知, 密封端面处的温度最高为39.2℃,温度梯度也最大。 碳石墨静环的温度沿轴向和径向远离端面的方向逐渐降低, 总体温度处于材料可承受的温度范围内。
5.2 结构热-力耦合分析

图5 碳石墨静环结构力学边界条件
碳石墨静环的结构力学边界条件如图5 所示, 在密封端面处施加轴向约束,在回转限位机构作用处施加径向位移约束。 由于转速较低可忽略气膜反压的影响,静环主要受到密封介质压力、弹簧压力和摩擦力矩的作用。
利用分析软件的热力学模块和静力学模块对密封静环进行热-结构分析,将热分析结果作为热载荷施加到静力学分析模型中, 得到静环的变形云图如图6所示。 可以看到静环的最大变形发生在接触面上, 总体的变形量较小。

图6 静环在热-结构边界条件下的变形云图
6 结论
本文根据船载经纬仪俯仰轴系的使用要求和工况参数, 通过比较各类动密封装置的优缺点, 设计了一套机械密封装置。 在设计中着重考虑了机械密封的摩擦副材料的选型以及尺寸参数、密封结构的组成、优化了结构布局以适应紧凑的轴向安装空间。 最后通过有限元仿真得到了密封静环的温度场分布以及热-结构边界条件下的变形,验证了该机械密封装置的有效性。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
宇航计测技术(2022年2期)2022-06-01 09:34:44
价值工程(2020年13期)2020-05-25 02:56:03
科学导报·科学工程与电力(2019年20期)2019-10-21 00:15:38
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
测控技术(2018年3期)2018-11-25 09:45:50
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
中国科技博览(2016年8期)2016-04-25 06:46:03
舰船科学技术(2016年1期)2016-02-27 15:39:19
