
论轮式移动结构的非完整约束及其运动控制1)
2020-08-11 02:33:02周宇生文相容王在华
力学学报 2020年4期
周宇生 文相容 王在华
(贵州大学数学与统计学院,贵阳 550025)
(解放军陆军工程大学基础部,南京 211101)
引言
轮式移动结构是一种通过驱动轮子转动来实现运动功能的经典机械模型,具有能耗小和操作方便等优点.尤其是独轮和两轮移动结构占地小且运动灵活,能够实现很多复杂的运动功能.因此在很多机械结构中需要加入轮式滚动接触机构,尤其在机器人、航空航天和机械制造等领域应用十分广泛.目前在商业领域中有独轮结构Unicycle,两轮结构Segway PT,三轮结构摩托车,四轮结构汽车和更多轮的拖--挂车.轮式机器人在近二十年是一个非常热门的研究领域,相关的建模、路径规划和控制设计研究很多[1-3].而在工业领域,很多公司研制了自己特色的轮式移动机器人[4].2002 年,Grasser 等[5]研制了两轮式移动机器人Joe,通过解耦分别驱动控制两轮转速,使得机器人的灵活性达到前所未有的水平.2007 年,德国Fraunhofer 等研制出一款货物搬运机器人,该机器人配备了红外线传感器,能到达指定地点搬运货物.2017 年,谷歌母公司Alphabet 发布了一款集轮子和腿为一体的机器人Handle,能够俯身跳跃和货物搬运,具有非常优秀的平衡能力.虽然工业界研发的轮式机器人功能越来越强大,但这一切在很大程度上应归功于发达的测量技术和强大的数据处理能力.从理论上来说,只要能够测量足够多的精确数据,并能很好地处理这些数据,就可以不需要实际模型,而直接基于数据驱动设计轨迹跟踪控制器[6].但毫无疑问,这样做的成本是高昂的,因为实际模型本身就是一种已知信息,放弃这么重要的信息无疑是一种巨大的浪费.正确的做法应该是尽量利用实际模型和观测信息,结合现代控制理论设计精确高效的低成本控制器.
具有滚动接触的结构在运动时会受到非完整约束[7],它是对系统运动速度的限制,并且不可积.与完整约束限制系统的位形不同,非完整约束是系统状态空间上的约束,主要是对系统运动速度的限制.在无任何约束的控制作用下,非完整移动结构可以在整个位形空间内运动.因此,一般来说非完整约束的强度要比完整约束要弱,文献[8]指出,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少0.5 个自由度.由于非完整约束结构本质上还是欠驱动的,导致其路径规划和跟踪控制设计都比较困难[9-10].文献[11]基于几何观点在拉格朗日和哈密顿框架下建立非完整约束力学系统的动力学方程,并讨论了在非完整约束下力学系统的可控性和控制器设计问题.文献[12]提出采用Pontryagin 极大值原理的Hamel 形式来解决移动机器人在球面上受非完整约束下的最优控制问题.
要想精确控制轮式移动结构的运动,必须同时清楚其运动学方程和动力学方程,而其动力学方程又需要利用运动学方程结合Euler-Lagrange 方程推导出来.目前很多研究仅仅针对其运动学方程,将约束方程转化为标准链式系统的形式[13],然后利用相关链式或幂式系统的控制理论设计速度控制器[14-15].但在实际问题中,实现运动任务所需要的速度是通过力或力矩来实现的,应该设计力或力矩控制器.另外一些研究仅仅针对其动力学方程,考虑跟踪给定的前向速度和偏航转速目标,设计自适应模糊或神经网络控制实现给定跟踪任务[16-17].但所给定的前向速度和偏航转速目标所对应的几何轨迹是什么并不清楚.而实际问题需要设计跟踪控制使得轮式移动结构能够精确地沿着给定的目标轨迹曲线运动.因此,必须同时考虑其运动学方程和动力学方程,设计力或力矩控制器使机器人实现给定的运动任务.但是,目前已有的文献对轮式非完整约束的运动规律理解还不深入,很多研究成果侧重于从控制理论的角度进行控制设计与分析,很少有研究能将轮式非完整约束下的运动规律与机器人运动控制设计有机结合起来.如文献[18-19]中,将前向速度和偏航转速同时看成是运动方程的控制输入变量和动力学方程的状态输出变量,基于中间变量来设计自适应模糊跟踪控制器.文献[20]中利用两个高增益观测器来估计两轮式移动结构的前向速度和偏航转速,然后在此基础上设计自适应反馈控制器来实现圆周运动.文献[21]采用保辛算法将多体系统连续时间域内的动力学方程进行离散化,再用瞬时最优控制保辛方法实现对目标轨迹的高精度跟踪.
为了设计控制器使轮式移动结构能精确地沿着给定目标轨迹曲线运动,首先应分析清楚轮式移动结构的非完整约束本质,以及机械结构在轮式非完整约束下的运动规律.然后将得到的运动规律与动力学方程有机结合起来,再利用现代控制理论设计合适的轨迹跟踪控制器.本文工作从质点连续光滑运动出发,认清轮式非完整约束的本质及理清各类轮式移动结构的运动学方程,并在此基础上给出求解动力学方程的一般方法.另一方面,利用平面曲线基本理论分析轮式移动结构在非完整约束下的运动规律,然后通过引入相对曲率为任务目标曲线设计动态轨迹跟踪目标.基于该动态轨迹跟踪目标,可以将实际问题中的目标轨迹曲线、运动学方程和动力学方程有机结合起来,为轮式移动结构设计精确高效的轨迹跟踪控制器以实现给定的运动任务.
1 质点沿光滑曲线运动的特征
1.1 质点连续光滑运动满足的条件
如图1 所示,一个质量为m的带电质点,在电场的作用下在平面上做光滑曲线运动.若要使该质点沿给定的光滑曲线运动,该如何控制电场力才能精确地实现运动任务?这是一个简单的轨迹跟踪控制问题,该质点好像没有受到任何约束作用,我们直接利用牛顿第二定律就可以得到其动力学方程
其中,Tx,Ty分别是沿坐标方向的电场控制力.
假设给定的光滑曲线是平面上的一个轨道槽,质点在该曲线槽里运动,那么该质点是否受到了约束作用呢?答案是肯定的.此时该约束是完整约束还是非完整约束呢?注意到质点沿该曲线运动时,其沿与切向垂直的横向方向的速度为0,即

图1 带电质点在平面电场中运动简图Fig.1 Motion schematic diagram of a charged particle in a plane with electric field

其中,θ 为运动曲线的切向量与x轴的夹角,可以理解为质点运动的偏航转速.事实上,质点在光滑曲线槽中运动时,受到槽对它的约束作用,使其速度满足约束方程(2),因此质点受到槽对它的非完整约束力.但如果没有轨道槽,质点在平面上做光滑曲线运动时,其运动速度也必须满足方程(2).若某时刻质点突然有一个不为零的横向速度,就会导致质点的运动轨迹出现一个尖点,不是光滑曲线.
假设质点在平面运动时坐标表示为光滑曲线r=(x(t);y(t)),令该运动轨迹曲线切向量长度为

结合式(2)和式(3),可以得到
方程(4)表明了质点沿光滑轨迹曲线运动的主要特征:沿与切向垂直的横向速度为零,轨迹曲线的切向量就是质点沿该曲线运动的前向速度.
方程(4)其实可以等价于
方程(2)是质点运动轨迹是光滑曲线的必要条件.当质点运动满足方程(4)时,可以推出其前向速度和偏航转速与实际运动轨迹曲线之间的关系.
1.2 质点的运动速度与实际运动轨迹曲线的关系

对式(6)关于t求导得

将式(6)和(7)交叉相乘并相减得

因此,质点运动速度与运动轨迹曲线之间的关系为
从式(9)可以看出,给定一个运动轨迹曲线可以确定质点运动的前向速度和偏航转速;反之,根据式(6),给定质点运动的前向速度和偏航转速,可以确定质点运动轨迹的参数方程.因此,利用式(9),可以将参数曲线表示成速度形式.
事实上,对于一般的机械力学系统,利用Euler-Lagrange 方程建模得到的动力学方程基本上都是关于速度的,所以将目标轨迹曲线转化为速度目标后,能非常方便地设计力或力矩控制器.
2 独轮的约束方程与动力学方程
如图2 所示,假设独轮足够宽且无侧翻和侧滑,则独轮的中心O在平面上做连续光滑运动.假设该中心坐标为(x(t);y(t)),故其运动需满足方程(2).在这个实际问题中,要使得中心O的运动满足方程(2),整个力学系统要受到非完整约束力的作用才能实现.因此,约束方程(2)是独轮运动受到的非完整约束.考虑到独轮的运动是通过驱动轮子转动来实现的,所以必须引入轮子转速这个变量.假设轮子不打滑和不空转,则独轮还受到如下完整约束

其中,r是独轮半径,是独轮转速.
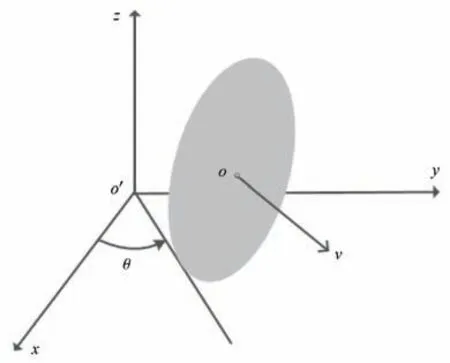
图2 独轮运动结构简图Fig.2 Motion schematic diagram of the single-wheel
因此,独轮总共受到两个约束作用,式(10)是一个完整约束,而式(2)是独轮受到的非完整约束.
独轮运动的动力学方程为

要使中心点O沿给定轨迹曲线运动,该如何设计控制力矩呢?由于中心O的运动满足方程(2),由式(9)可将目标曲线转化为速度目标,将式(10)代入式(11),动力学方程转化为
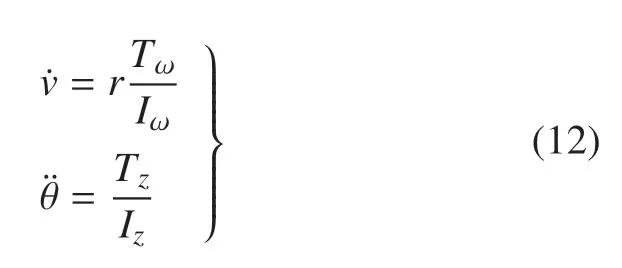
这样就将原问题转化为线性系统(12)关于速度目标(9)的一般轨迹跟踪控制问题.
3 两轮式倒立摆的约束方程与动力学方程
两轮式倒立摆是一类经典欠驱动的非完整系统,在实际中应用广泛,相应的运动规划和控制研究非常多[1;22].如图3 所示,假设两轮无侧滑无空转,左右两轮各安装一个驱动马达,通过驱动左右两轮转动来实现两轮式倒立摆的运动和摆杆平衡.

图3 两轮式倒立摆结构简图Fig.3 Schematic diagram of the two-wheeled inverted pendulum
3.1 两轮运动的约束方程
设中心O坐标为(x(t);y(t)),当两轮式倒立摆在平面上无侧滑时,O在平面上沿光滑曲线运动,故其运动必须满足约束方程(2).另外,当两轮不打滑不空转时,有如下速度关系式

因此,两轮移动结构在运动时总共受到一个非完整约束(2)和两个完整约束(13).从方程(13)中将反解出来,并结合方程(5),则可将两轮式移动结构运动时所受约束方程总结为

实际上两轮式移动结构只受到3 个约束作用,式(14)中其实包含了一个赋值关系式(3).
3.2 两轮式倒立摆的动力学方程
两轮式倒立摆的摆杆稳定是通过整个结构前后运动的耦合作用来实现的,这里面受力分析比较复杂.目前求解其动力学方程的方法主要有Newton 法[23]、Kane 法[24]和Euler-Lagrange 方法.相对来说,Newton 法和Kane 法都比较繁琐.这里我们采用Euler-Lagrange 方程来建立其动力学方程[22].
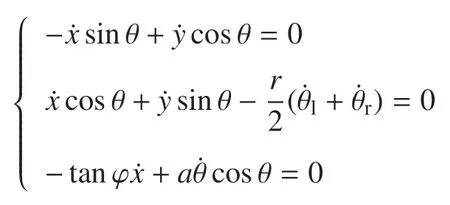
将式(4)的第二式代入式(14)的第三、四式,并结合式(2),得到两轮结构运动约束的另一种形式
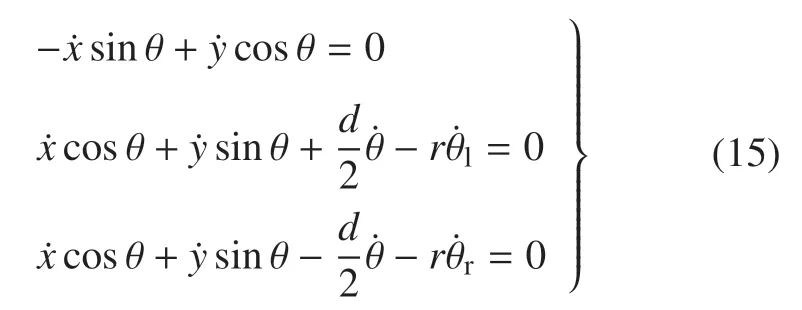
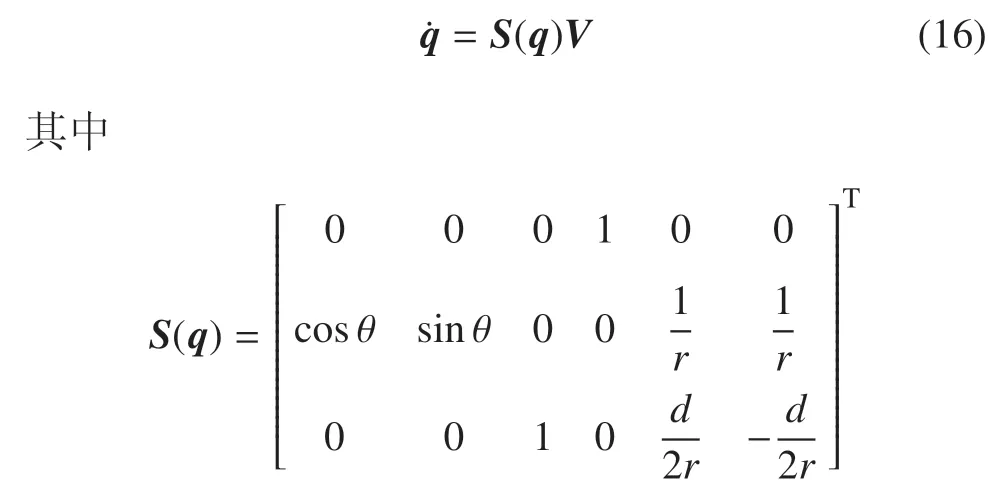
令q=是两轮式倒立摆的广义坐标,则运动约束方程(15)可以写成矩阵形式,其中

另一方面,令V=,约束(14)写成矩阵形式

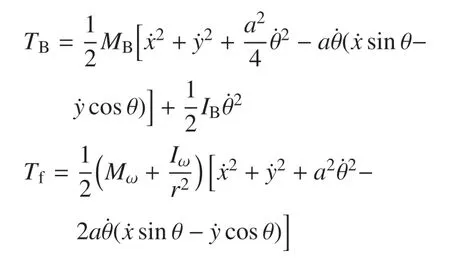
采用Euler-Lagrange 方程来求解两轮式倒立摆的动力学方程[22].假设和M分别是轮子和中间体质量,分别是轮子绕轮轴方向和z轴方向的转动惯量,IB和Iz分别是中间体绕轮轴方向和z轴方向的转动惯量.
两轮的前向动能和转动动能之和为
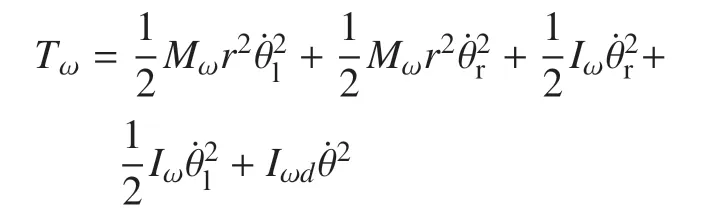
中间体的前向动能和转动动能分别为

转动惯量Iz是和摆角相关的,在摆角较小的情况下,Iz近似一个常量.两轮式倒立摆重力势能为

因此,Lagrange 函数为

利用非完整力学系统的Euler-Lagrange 方程

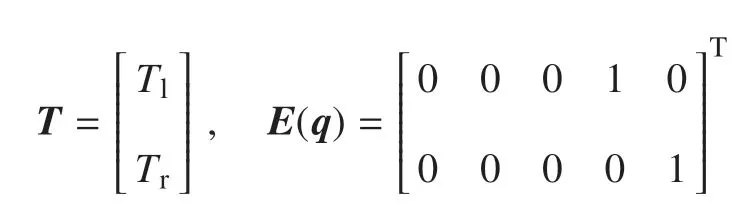
其中,λ 是Lagrange 乘子,T是输入力矩向量,E(q)是输入匹配矩阵
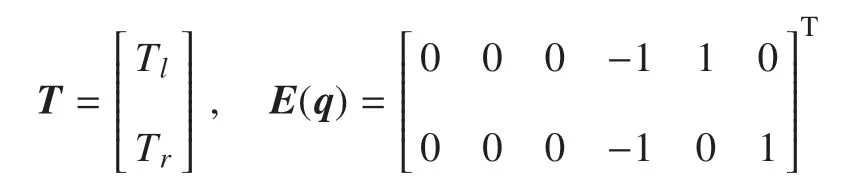

计算式(18)并按照状态变量的各阶导数整理成为了消去式(19)中的Lagrange 乘子,将式(16)的左右两端分别对t求导并代入式(19)得

对式(20)左右两边同时左乘ST(q),并利用式(17)将Lagrange 乘子消去得


将式(22)展开,并改写成状态方程的形式
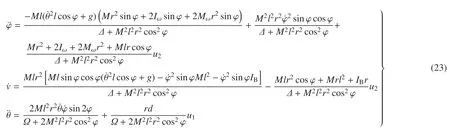
其中
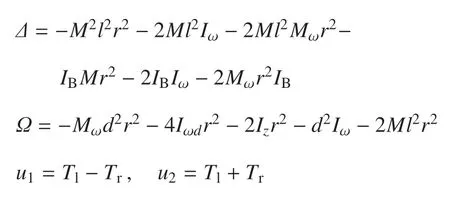
3.3 两轮式倒立摆的运动控制
要使两轮式倒立摆的中心点O沿给定的轨迹曲线运动,并且整个运动过程中摆角始终保持足够小,该如何设计控制器(u1;u2)呢?利用式(9)将目标轨迹曲线转化为速度目标的形式,结合式(23)的后两式可将原问题转化为一般的轨迹跟踪控制问题.另外,动力学方程(23)可以解耦成两个控制子系统,可以分别设计控制器u2和u1.在文献[25]中,通过引入关于摆角的大权重性能指标,对摆角进行线性化后将得到的线性系统看成标称系统,然后设计关于性能指标的最优积分滑模控制器以实现两轮式倒立摆的往返运动.
4 三四轮移动结构的约束方程与动力学方程
4.1 三四轮移动结构的运动约束
如图4 和图5 所示三轮和四轮移动结构,假设驱动马达都安装在后两轮上,前轮可以通过控制方向盘进行转向.后两轮所受到的约束和两轮式倒立摆是一样的,都可以用式(14)表示.
对于前轮所受约束,考虑中间杆的前端点P(xP;yP)的运动.注意到P点有两重身份,首先作为前轮的中心点,它的运动满足横向速度为零

另一方面,P作为中间杆前端点,它的运动速度如图6 所示,结合式(24)有如下关系
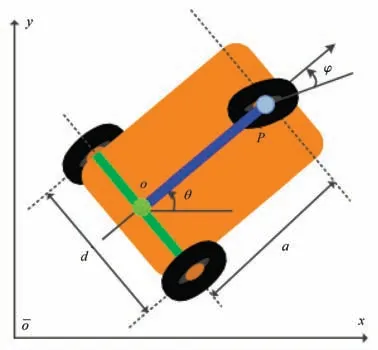
图4 三轮移动结构简图Fig.4 Schematic diagram of the three-wheeled mobile structure

图5 四轮移动结构简图Fig.5 Schematic diagram of the four-wheeled mobile structure
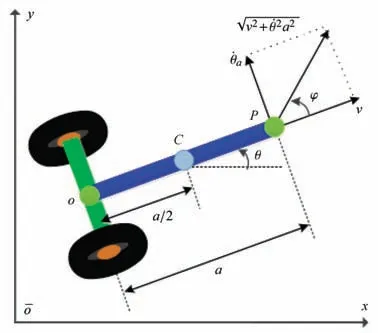
图6 P 点速度示意图Fig.6 Schematic diagram of the velocity of P
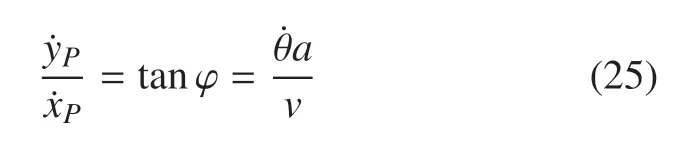
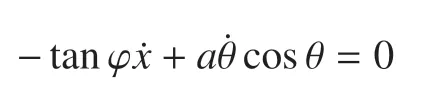
将式(25)改写为

方程(26)是一个非完整约束,它刻画了前轮转向角与中心点O的速度之间的关系.若将=vcos θ 代入式(26),还可以将该非完整约束改写为
4.2 三轮移动结构的动力学方程
由于图4 和图5 中三、四轮结构所受的约束方程完全相同,因此利用方程(18)求解动力学方程的过程完全一样.仅以三轮为例,是通过方向盘人为进行控制的,所以将看成控制变量.结合式(14)和式(26),三轮移动结构所受到的所有运动约束为
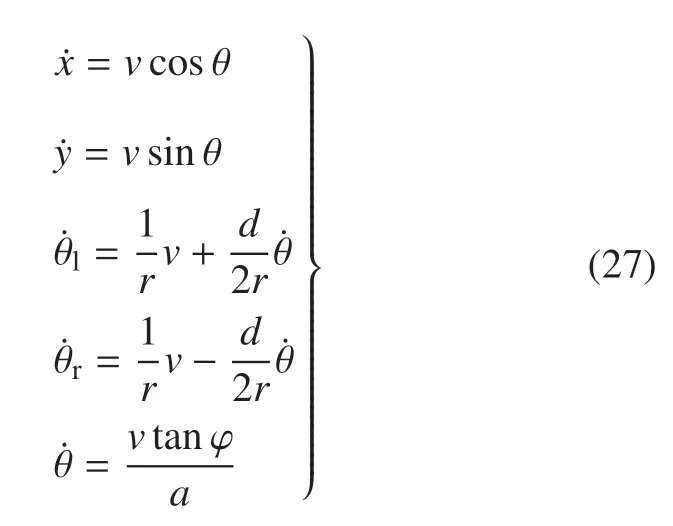
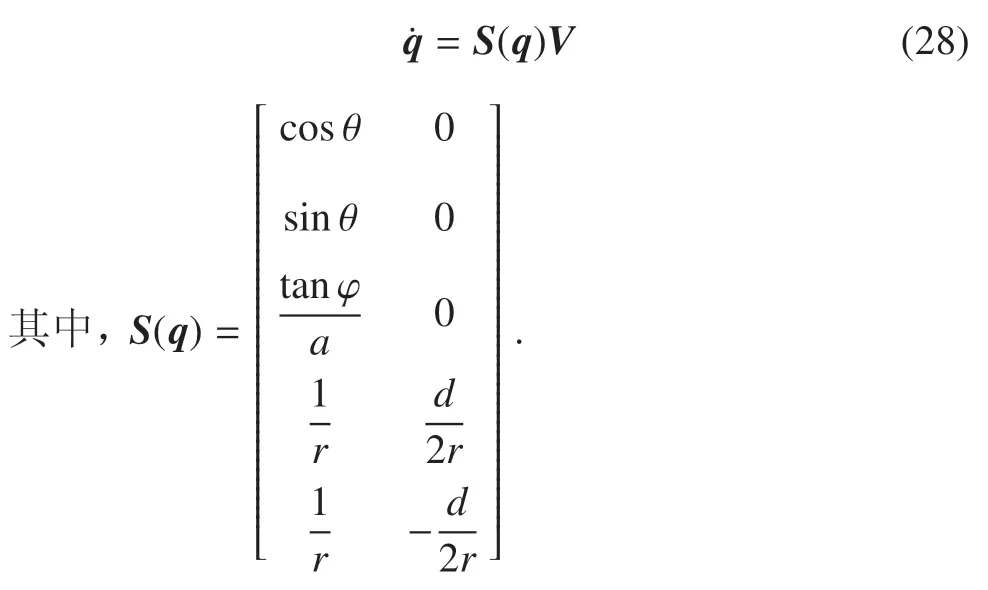
令q=(x;y;θ;θl;θr)T,V=,将约束方程(27)写成矩阵形式
从式(27)来看,三轮移动结构似乎一共受到四个约束作用,但其实不然,约束方程(26)和(13)的第二式并不是相互独立的,而是互相影响的.在两轮式移动结构的情形中,两轮式的三个约束分别是横向速度为零,两轮转速之和决定前向速度,两轮转速之差决定偏航转速.而在本文的三轮移动结构中,3 个约束作用实际上分别是横向速度为零,两轮转速之和决定前向速度,前向速度v和决定偏航转速,此时对应的就是确定的了.因此,我们将这两个约束整合在一起,将三轮移动结构受到的约束作用总结成如下形式
将其写成矩阵形式

注意到,F(q);S(q)满足如下关系

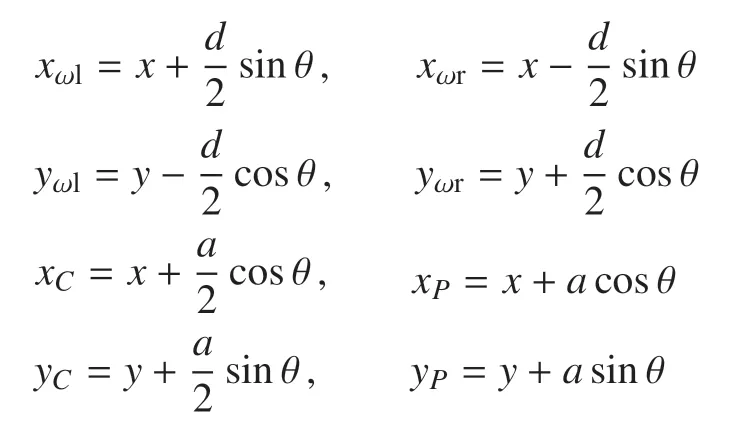
为了利用Euler-Lagrange 方程来计算三轮移动结构的动力学方程,首先需要分别计算各个部分的动能.如图6 所示,可以得到如下位置关系
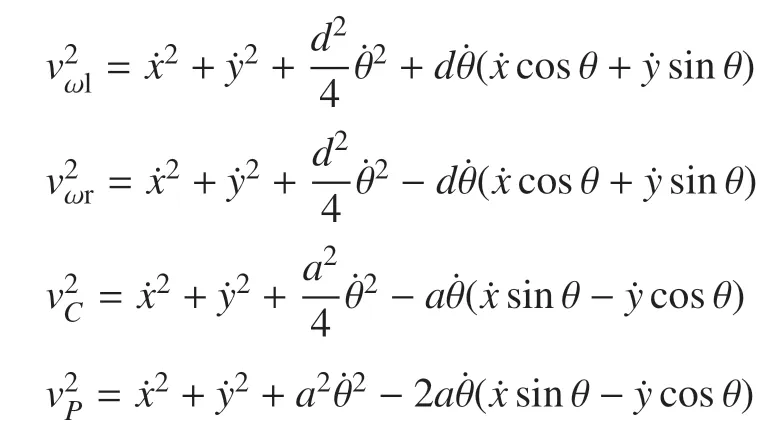
因此,两后轮的前向动能和转动动能之和为

中间杆和前轮的前向动能和转动动能之和分别为
其中,MB是中间杆的质量,IB是中间杆绕O点在x−y平面上的转动惯量.
将Lagrange 函数L=+TB+Tf代入式(18),此时输入力矩向量T和匹配矩阵E(q)分别为
计算式(18),并按状态变量的各阶导数进行整理得

对式(28)关于t求导,然后代入式(30)得

对式(31)左右两边同时左乘ST(q),并利用式(29)将Lagrange 乘子消去得三轮移动结构动力学方程为

4.3 三轮移动结构的运动控制
动力学方程(32)可以写成状态方程形式
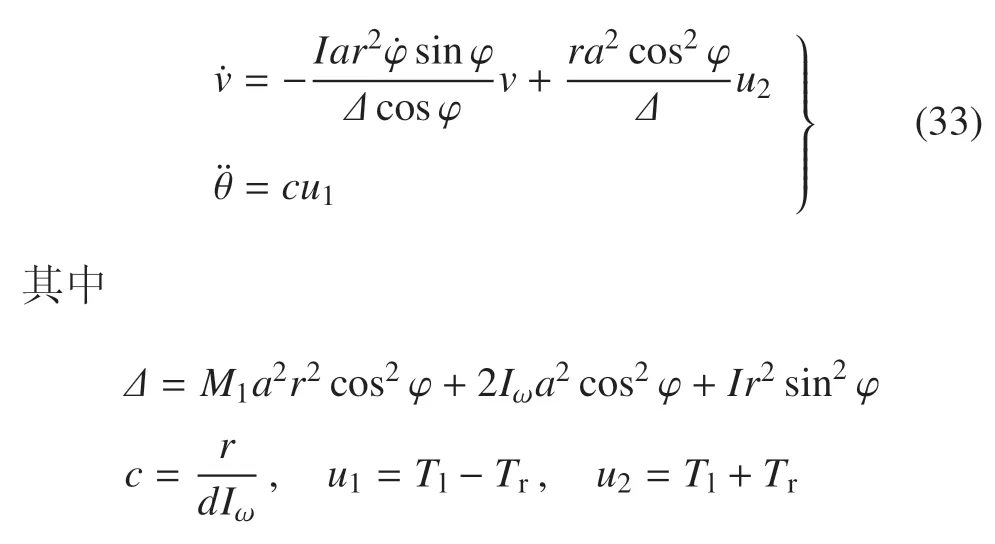
利用式(9)将目标轨迹曲线转化成速度形式,结合控制系统(33)得到一般的轨迹跟踪控制问题.注意这里u1是中间控制变量,而最终需要设计的控制变量是和u2.由于方程(33)是解耦的,因此可先根据第二个方程设计u1,然后结合方程(26)得
方程(34)给出了控制变量u1和的关系.将得到的控制变量代入式(33)的第一式,再设计控制变量u2完成最终的轨迹跟踪控制设计任务.
5 动态跟踪目标与运动控制设计
前面几节内容已经系统地分析了各类轮式移动结构的约束方程及其动力学方程.实际上约束方程(2)是所有轮式移动结构在无横向滑动时必须满足的非完整约束.通过分析该约束条件,我们可以利用式(9)将轮式移动结构的任务轨迹曲线转化为成速度目标的形式,然后结合其动力学方程将原运动任务转化为一般的轨迹跟踪控制问题.如文献[26]在考虑轮式倒立摆的避障运动控制时,就将设计好的分段多项式轨迹曲线转化成近似的速度目标形式,然后结合动力学方程设计轨迹跟踪控制器.文献[27-29]在考虑拖--挂车的轨迹曲线跟踪和避障运动时,就是先将目标轨迹曲线转化为式(9)这样的速度目标,然后采用模型预测等控制方法实现给定的运动任务.但从这些论文的仿真结果来看,不管采用多么先进的控制设计方法,实际运动轨迹总是会有一些偏离目标轨迹曲线,尤其是在最初始的一段时间内.出现这样的结果主要原因之一在于所采用的速度目标(9)在初始时刻和实际速度相比具有比较大的差值,这个速度误差会累计成很大的位置误差.另外,如果采用静态速度目标(9),当前向速度误差控制系统受到未知扰动影响时,会导致实际前向速度偏离给定的前向速度目标,而此时偏航转速目标不能时时地进行调整,这就会导致轮式移动结构偏离目标轨迹曲线.为了同时解决这两个问题,使轮式移动结构能精确地沿着给定目标轨迹曲线运动,我们将静态速度目标(9)改进为动态跟踪目标.
5.1 动态跟踪目标设计

其中k(s(t))=是目标曲线的相对曲率.
事实上,曲率函数k(s(t))是曲线的核心特征.当参数t=s是弧长参数时,前向速度目标是单位速度,此时曲率函数k(s)在平面上唯一确定一条光滑曲线.当t不是弧长参数时,由前向速度和曲率函数k(t)=k(s(t))可以在平面上唯一确定一条光滑曲线.对曲线引入新的时间变量η,它由t=φ(η)确定,其中φ 是一一对应的光滑函数,则可将原参数曲线转化为=.由复合函数求导关系


从上式可看出,方程(35)中的前向速度目标是可以通过参数变换进行调整的.因此方程(35)中涉及到曲线曲率的第二式才是轨迹曲线的本质刻画.
在实际跟踪过程中,如果我们只需要轮式移动结构精确沿给定轨迹曲线运动,而并不在乎整个过程中运动速度的快慢,那么可以放弃对前向速度目标的精确跟踪,集中精力跟踪方程(35)的第二式.此时可以将跟踪目标(35)改进为动态跟踪目标
一般来说,φ(t)可设计为

这里l是目标轨迹曲线的长度,此时

在实际应用中,由于初始时刻轮式移动结构都是静止的,利用前向速度目标(37)可以使得跟踪控制问题的初始速度误差为零,并可以根据实际需要调节参数β 使得整个过程跟踪控制的效果最好.
5.2 动态跟踪目标的优点
与静态速度目标(9)相比,采用动态跟踪目标(36)具有两个明显的优点:
(1)速度误差(尤其初始速度误差)不会累积成越来越大的位置误差.由于动态跟踪目标直接指向目标曲线的本质-曲率,当实际前向速度偏大时,方程(36)第二式所给的偏航转速目标也变得更大,只要控制过程中的偏航转速误差足够小,也即曲率跟踪误差足够小,就能保证轮式移动结构不偏离给定轨道向外偏转.反之,若实际前向速度偏小,那么方程(36)第二式所给出的偏航转速目标也会相应变小,只要曲率跟踪误差小就能保证轮式移动结构不偏离给定轨道向内偏转.因此,尽管在整个运动过程中存在很大的前向速度误差,但采用动态跟踪目标能够保证轮式移动结构始终在给定轨道上运动.
(2)前向速度目标可以根据实际需要进行设计,这在实际应用中非常重要.由于对前向速度目标无限制要求,而采用不同的前向速度目标,所导致的结果仅仅是整个运动过程中轮式移动结构运动快慢不同而已.另外,考虑到轮胎最大静摩擦力是有限的,因此实际控制力矩最好不要超过该最大静摩擦力.这里我们可以通过设计小一些的前向速度目标,使得实际需要的控制力矩尽量小于轮胎的最大静摩擦力,以免轮胎打滑严重影响跟踪控制效果.
5.3 基于动态跟踪目标的控制仿真
以单位圆为目标轨迹曲线为例,由于目标曲线的相对曲率是常数1,文献[30]中将偏航转速目标设计为实际的前向速度,这样设计的动态跟踪目标恰好是式(36)的特殊情形.由于两轮式倒立摆的动力学方程是非线性的,原问题转化为非线性系统的轨迹跟踪控制问题.为此,我们先利用反馈线性化方法将系统转化为线性系统,然后基于线性系统利用预测反馈处理输入时滞的影响.而线性化误差和外部有界扰动整体打包后利用积分滑模控制来处理.由于所设计的积分滑模面就是两轮式倒立摆需要完成的运动任务对应的状态,因此最终设计的积分滑模控制不但能使两轮式倒立摆在保持摆杆稳定下很好地完成给定的运动任务,整个运动过程还具有很强的鲁棒性.如图7 所示,实际运动轨迹几乎和单位圆是重合的,而采用静态速度目标(9)时,实际运动轨迹和目标曲线会有很大的偏差.
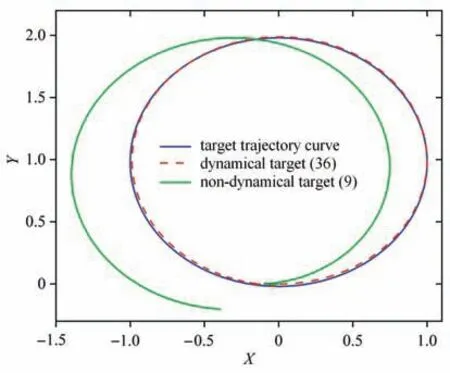
图7 两轮式倒立摆在平面上实际运动轨迹Fig.7 Actual motion trajectory of the two-wheeled inverted pendulum in a plane
文献[30]中给定的目标轨迹曲线是单位圆,是具有常数曲率的特殊曲线.为了更好地说明采用动态跟踪目标的控制效果,我们考虑独轮沿一个非常数曲率的光滑曲线运动.假设初始时刻独轮是静止的,需要完成的运动任务轨迹曲线是摆线

由曲线基本理论可计算出该轨迹曲线的曲率为

注意到该曲线在端点处的曲率趋于无穷,在应用动态跟踪目标(36)进行控制时,会出现极大的数值计算误差.因此我们选取摆线中不包含上述端点的一段曲线作为目标轨迹曲线

此时,上述目标轨迹曲线的曲率可以表示为
另外,曲线的弧长函数为

根据式(36)设计动态跟踪目标

令X=[x1;x2]T=[s;v]T,前向速度控制方程改写为二阶状态方程

再将控制方程(42)转化成误差系统,令
则前向速度误差系统为

要使得整个运动过程中前向速度误差一直保持足够小,可以采用文献[22]中的思想,利用线性二次型最优控制的权重来调节.由于式(40)中前向速度目标ˆv是逐渐趋近于零的,且其无穷积分是收敛.因此可以引入一个无限时域线性二次型性能指标

该性能指标中关于前向速度误差的权重取足够大,这样所设计的最优控制能使前向速度误差尽量小.利用线性二次型最优控制理论,u1设计为


针对偏航转速控制系统,可以采用文献[25]中的积分滑模思想设计积分滑模控制器.令,则系统(41)的第二式可转化为误差控制系统

其中k是控制增益参数(后面所有仿真中k=40).然后将动态跟踪目标设计为积分滑模面,其中G>0 是合适的常数
这样,切换控制设计为

其中µ是滑模控制参数,D是外部扰动的最大振幅.最终u2设计为

这样设计的积分滑模控制(45)具有很强的鲁棒性.
若采用静态速度目标(9)的形式,即
若同样采用式(44)和式(45)作为控制器,由于ˆv不是逐渐趋于零的,从文献[22]的分析可知,此时不能采用无限时域的性能指标,而必须采用有限时域性能指标,导致对应的黎卡提微分方程很难求解,控制器设计变得困难.而采用动态目标(40)时,只需求解代数黎卡提方程,控制器设计变得简单.
一般来说,采用静态目标(46)时,会使得误差系统的初始值不为零.而采用动态目标(40)时,可以根据实际需要设计合适的前向速度目标,使得初始速度误差为零.如图8 和图9 所示,明显采用静态跟踪目标时的速度累积误差会远远大于采用动态跟踪目标时.而累积速度误差大自然会导致累积位置误差也很大,使最终得到的实际轨迹曲线严重偏离目标曲线.如图10 所示,采用动态跟踪目标(40)时,实际轨迹偏差非常小,而采用静态跟踪目标(46)时,实际轨迹严重偏离目标曲线.另外,图8 和图9 中红色的线在大概一半的时间时就结束了,这是因为采用静态目标(46)时的实际平均速度要比采用动态目标(40)时更快,提前完成了运动任务.
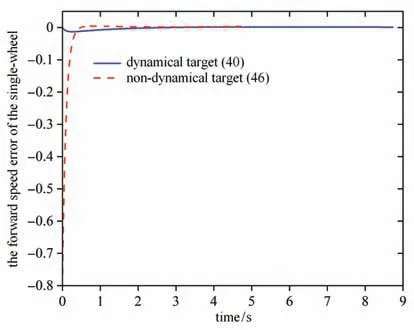
图8 独轮的前向速度误差Fig.8 Forward speed error of the single-wheel
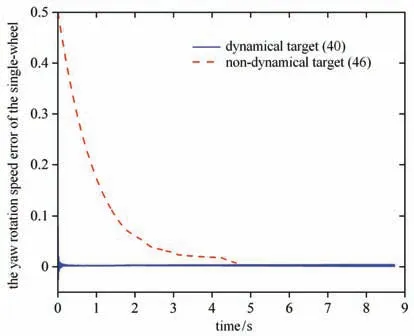
图9 独轮的偏航转速误差Fig.9 Yaw rotation speed error of the single-wheel
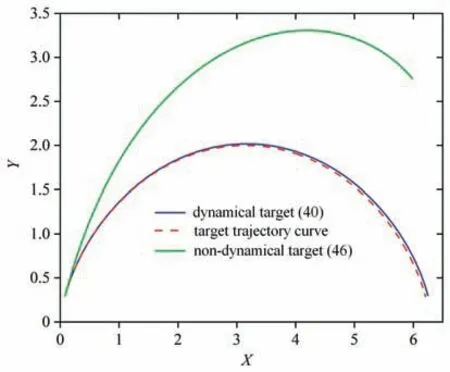
图10 独轮在平面上实际运动轨迹Fig.10 Actual motion trajectory of the single-wheel
实事上,在采用动态跟踪目标(40)时,由于偏航转速目标是根据实际前向速度时时调整的,能够极大地减少累积位置误差.即使前向速度误差非常大甚至误差系统不稳定,只要偏航转速目标能被精确跟踪,就能保证独轮沿着给定的目标轨迹曲线运动.考虑误差系统(43)受到未知扰动d(t)影响的情形

当d(t)=[5y1;10:5y2]T时,若在d(t)的影响下继续采用控制器(44)和(45),则此时误差系统(47)会变得不稳定,其前向速度误差如图11 所示.但从图12 可以看出,虽然前向速度误差很大,但由于采用了动态跟踪目标(40),其实际运动轨迹依然和目标曲线非常接近,实现了任务目标精确跟踪的目的.

图11 d(t)影响下独轮的前向速度误差Fig.11 Forward speed error of the single-wheel under the effect of d(t)
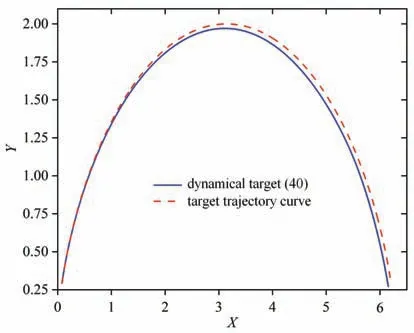
图12 d(t)影响下独轮在平面上实际运动轨迹Fig.12 Actual motion trajectory of the single-wheel under the effect of d(t)
6 结论
不同类型轮式移动结构在平面上不发生横向滑动时都会受到一个共同的非完整约束,该非完整约束本质上就是质点沿平面光滑曲线运动时沿与切向垂直的横向方向的速度为零.本文理清了各轮式移动结构的所有约束方程,在此基础上,给出了基于Euler-Lagrange 方程建立不同轮式移动结构动力学方程的一般方法.另外,基于该非完整约束,我们可以将目标轨迹曲线转化为速度目标的形式,然后引入相对曲率设计动态跟踪目标.仿真结果显示,即使前向速度跟踪误差非常大,甚至前向速度误差系统不稳定,采用动态跟踪目标都能保证轮式移动结构不偏离给定目标轨迹曲线.还可以通过设计合适的前向速度目标使得跟踪的效果达到最好.
本文所提出的动态跟踪目标方法从根本上解决了轨迹曲线精确跟踪的问题,其他任何先进控制设计方法仅仅从控制设计的角度是达不到这样的精确效果的.实事上,受到该非完整约束的各类型机械结构的精确运动控制问题都可以采用动态跟踪目标方法.甚至只要是需要精确跟踪给定光滑轨迹曲线的控制问题,都可以采用该方法,达到精确跟踪的目的.进一步地,后续工作还可以引入挠率,将动态跟踪目标方法推广到空间轨迹曲线的情形,这将大大扩展动态跟踪目标思想的应用范围.
致谢衷心地感谢审稿人认真审阅我们的论文,给出的宝贵意见使论文得到极大的改进.
猜你喜欢
加油站服务指南(2021年4期)2021-07-21 02:29:22
小型微型计算机系统(2021年4期)2021-04-12 09:50:54
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
计算机应用(2017年4期)2017-06-27 08:10:42
计算机应用与软件(2016年11期)2016-12-26 08:33:20
电视技术(2015年5期)2015-06-22 14:40:00
人生十六七(2015年6期)2015-02-28 13:08:38
