
信号交叉口左转车辆跟驰行为建模
2020-08-06 00:23魏福禄郭永青蔡正干
科学技术与工程 2020年18期
魏福禄, 刘 攀, 陈 龙, 郭永青, 蔡正干
(1. 东南大学交通学院,南京 21000;2. 山东理工大学交通与车辆工程学院,淄博 255000)
跟驰行为作为典型的驾驶行为是交通流分析与建模的关键研究内容之一,也是传统驾驶模式向智能驾驶模式演变过程中的关注重点。对信号交叉口左转车辆跟驰行为细节的深刻理解与建模,对减缓交叉口交通拥堵、保障交通安全以及丰富城市交通流理论内涵都有着十分重要的意义[1]。
中外学者对跟驰理论及其内涵不断进行着多维度深层次的系统研究。在信号交叉口车辆跟驰行为的研究方面:Zhu等[2]针对信号交叉口信号灯灯色切换引起车辆刹车减速的现象进行研究,改进优化速度模型描述信号交叉口车辆的跟驰行为,仿真结果显示所建模型能够更加准确的描述信号交叉口跟驰车辆刹车过程;覃频频等[3]考虑了信号交叉口道路几何设计参数对跟驰行为的作用,运用二自由度车辆动力学模型对智能驾驶员模型(intelligent driver model, IDM)进行改进,构建了新的跟驰模型,仿真结果表明,改进后的跟驰模型在弯道、超高的道路上性能表现优越;王玄金[4]考虑了车辆跟驰行为所受到的前车换道行为的影响,利用NGSIM (next generation simulation)实测数据,在全速度差(full velocity difference, FVD)模型的基础上建立了不同换道场景刺激下的跟驰模型;Konishi等[5]提出了一种耦合地图的跟车交通模型,描述了在单车道上行驶而没有超车的一组车辆的动态行为;以全速度差为基础,构建车与设施通信条件下信号交叉口车辆跟驰模型,数值仿真结果表明:车辆在信号交叉口运行效率会随着车与设施通信影响范围的扩大而提升[6]。此外,还有学者研究了不良天气影响下的车辆跟驰行为[7-8];部分学者还考虑了跟驰车前后多辆车或侧向车对跟驰行为的影响,建立了在多车影响下的跟驰模型[9-12]。
现有跟驰模型大多是在直行路段车辆的基础上建立的,而对信号交叉口转弯车辆的跟驰行为的理解尚不够深入。研究表明在转弯半径影响下跟驰行为会有新的特征表现。为此,采用一种基于高精度全球定位系统(global positioning system,GPS)的实时动态车辆跟驰数据采集方法获取了大量城市信号交叉口左转车辆跟驰数据,解析了信号交叉口左转车辆跟驰特性及其关键影响因素,进而建立了能够描述信号交叉口左转车辆跟驰行为的改进的全速度差模型。
1 数据采集实验设计
实验选用两辆普通小汽车作为实验车辆,在实验车上分别安装两台高精度GPS仪器、摄像机,记录车辆在跟驰实验过程中的速度、位置、环境等数据以及影响跟驰行为的突发事件,在2019年4月23日—4月24 日在山东省淄博市张店区市区内多个路段的信号交叉口处进行实车跟驰实验。实验所选调查路段包含不同转弯半径的信号交叉口,为研究提供了多样化的数据支持。
1.1 跟驰数据采集
交叉口转弯车辆跟驰行为的研究数据包括交叉口几何参数、跟驰车及前导车速度、加速度、车间距等信息。实车跟驰实验目的在于:利用车载高精度GPS仪,记录实验车辆在选定的实验路线中跟车行驶状态下前车和后车的速度轨迹,并且获得车辆的实时位置、速度、方向等信息。实验选用的高精度GPS仪器体积较小、精度高且便于携带,可以根据实验需要安装在车辆的任意位置。数据采集实验统一将高精度GPS仪器安装在前导车与跟驰车的前挡风玻璃下,从而排除因安放位置不同造成采集点位置的差异,避免其他设备和实验环境对跟驰行为造成的影响。获得能够反映信号交叉口实际交通流中左转车辆跟驰特性的数据,为分析信号交叉口左转跟驰车辆的运行规律,检验模型稳定性以及为参数标定提供坚实基础。
利用高精度GPS实时动态车辆跟驰数据采集方法,收集城市信号交叉口左转车辆在不同转弯半径的交叉口处跟驰行驶的相关参数。跟驰全过程采用视频录像,将视频与数据相结合,可以进一步保证数据的准确性,同时获得能够反映信号交叉口实际交通流中左转车辆的跟驰特性的数据,为分析信号交叉口左转跟驰车辆的运行规律、检验模型稳定性及为参数标定提供坚实基础。路线选择如图1所示。
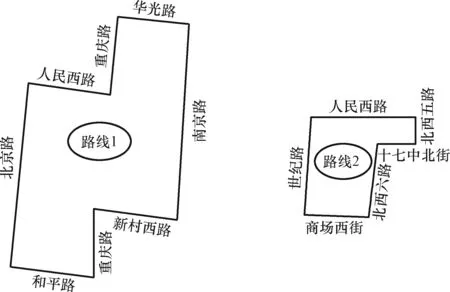
图1 淄博市数据采集路线Fig.1 Data acquisition route in Zibo
调查地点的选取关系到数据采集的多样性和准确性,是实验方案中至关重要的一环,必须加以重视。在调查地点的选择上把握以下原则。
(1)在设计实验线路时尽量使所选线路中包含多个不同道路等级相交的信号交叉口,这样可以获得车辆在不同道路等级不同转弯半径下交叉口左转车辆的跟驰数据。
(2)在实验线路经过的交叉口处选择合适的左转车道作为调查车道,避免交叉口处交织车辆对信号交叉口左转车辆跟车行为的影响。
1.2 路线选择与数据预处理
在数据采集的准备阶段,将高精度GPS仪器中的Mobile GIS软件采集设置为线采集-距离模式,每隔1 m记录一个采集点,高精度GPS仪器会自动获得这个点的时间、位置、方向、速度、加速度等信息,然后将数据导入计算机中,地理信息系统办公(GIS office)软件会显示具体的跟驰路线;高精度GPS仪器中的Mobile GIS软件还能够实时自动记录并保存行驶轨迹,并且根据位置信息直接在地图上显示出来,便于判断分析数据的准确性。根据实时轨迹可以判断处于转弯过程的采集点,用此方法来初步获得跟驰实验数据。试验车行走路径和数据可通过GIS office导出,如图2、表1所示,显示8.786 km的实验路线1和部分数据。
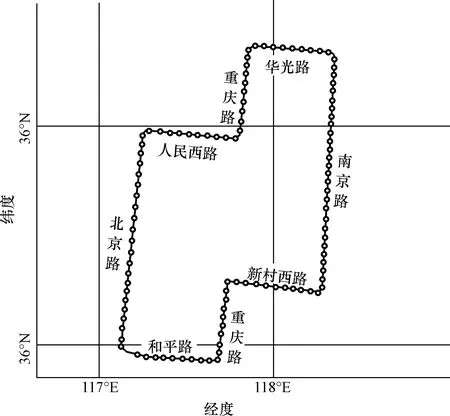
图2 GIS office数据采集路线1Fig.2 Data acquisition route 1 of GIS office

表1 GIS office跟车数据Table 1 Car-following data in GIS office
跟驰数据采集实验完成后,利用计算机将GIS office软件中的采集点信息导出,包括采集点的经纬度坐标、采集时间、海拔高度、位置精度强弱度(position dilution of precision, PDOP)、车辆速度、方向等信息,并根据Mobile GIS软件记录的实时轨迹图和跟驰数据采集实验时拍摄的跟驰全过程视频,对数据进行清洗和分析,获取在信号交叉口左转处GPS记录的采集点,并根据索引信息将处于信号交叉口左转处的采集点选出,在GIS office软件中将坐标系转化为投影坐标系以后,通过数理统计与分析、数据挖掘技术对数据进行预处理,得到不同转弯半径下的跟驰数据信息。
2 左转车辆跟驰速度特性
2.1 不同转弯半径下的速度时变特性
驾驶员跟驰车速是影响跟驰行为的重要因素,也是车辆跟驰模型的主要参数。根据车辆跟驰实验所采集的数据,得到城市信号交叉口不同转弯半径下左转车辆跟驰车速的时变演化,如图3所示。
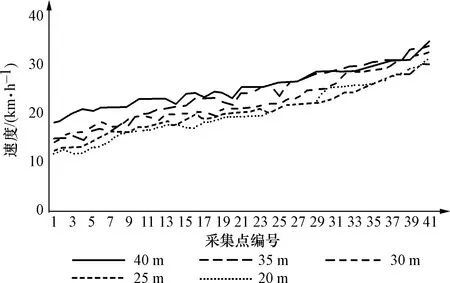
图3 不同转弯半径下跟驰速度时变演化Fig.3 Time-varying evolution of car-following velocity under different turning radii
由图3可知,城市信号交叉口左转车辆在不同转弯半径条件下转弯过程的跟驰速度不同,转弯半径越大,跟驰车速的样本数据会在越高的样本数值上下波动,体现了转弯车速与转弯半径间的正比关系。
2.2 不同转弯半径下速度分布特性
根据跟驰数据采集实验所统计的跟驰车速度信息,通过对数据进行聚类和统计分析,得到不同转弯半径下跟驰车辆出现频数最高的速度分布,以转弯半径为40 m的交叉口为例,所调查车辆速度分布频数,如图4所示。

图4 转弯半径为40 m时车速频数分布Fig.4 Frequency distribution of vehicle speed at a turning radius of 40 m
通过多次实验调查得到淄博市张店区交叉口不同转弯半径下左转跟驰车辆的平均车速的变化结果统计,如表2所示。

表2 跟驰车辆不同转弯半径下平均速度统计Table 2 Average speed statistics of car-following vehicles with different turning radius
由表2可知,不同转弯半径下淄博市张店区信号交叉口左转跟驰车辆的平均速度会出现不同程度的变化。随着交叉口转弯半径的增大,跟驰车辆的平均速度也会逐渐增大。
3 左转车辆跟驰模型的建立及标定
3.1 改进的全速度差左转车辆跟驰模型
在分析中外有关跟驰模型的研究之后,发现全速度差模型(FVD)在描述城市信号交叉口时走时停、局部阻塞等交通流现象时更加符合实际,并且从物理角度上来说,更加符合实际交通流的运行状况[13]。
在传统FVD模型中并没有考虑到跟驰车辆对前导车加速、减速刺激反应的敏感度是不同的。然而,交叉口转弯车辆在实际跟驰过程中对前车加速、减速的反应存在差异。因此,对信号交叉口左转车辆跟驰行为进行模型时,需要考虑跟驰车驾驶员对前导车加、减速反应的非对称性。从而对传统FVD模型进行改进,当前导车加速时,模型表达式如式(1)所示;当前导车减速时,模型表达式如式(2)所示:
an(t)=k+{V[Δxn(t)-vn(t)]}+λ+Δvn(t)
(1)
an(t)=k-{V[Δxn(t)-vn(t)]}+λ-Δvn(t)
(2)
式(1)中:k+、λ+为前导车加速时模型的敏感度系数;k-、λ-为前导车减速时模型的敏感度系数;vn(t)为第n辆车的速度;xn(t)为第n辆车的位置;Δvn(t)为前后车速度差,为后随车速度减去前导车速度;Δxn(t)为前导车与后随车的车头间距,即 Δxn(t)=xn+1(t)-xn(t);V[Δxn(t)]表示优化后的速度函数,即
(3)
(4)
式中:he表示安全车间距;vmax表示最大行驶速度;vn(t)、vn+1(t)分别为后随车与前导车在t时刻的速度;τ为驾驶员的反应时间,取τ=1s;L为前导车车长;a为t时刻后车的加速度。
3.2 模型参数标定
在确定目标函数Fobjective和所要标定的模型参数后,把跟驰数据引入改进后的全速度差模型中,通过迭代计算对跟驰模型参数进行标定[14]。
选用遗传算法来处理研究需要解决的问题,为保证运行结果的精确性,经过多次运算和反复对比,得到了信号交叉口不同转弯半径下模型中各参数的最终取值结果,如表3、表4所示。
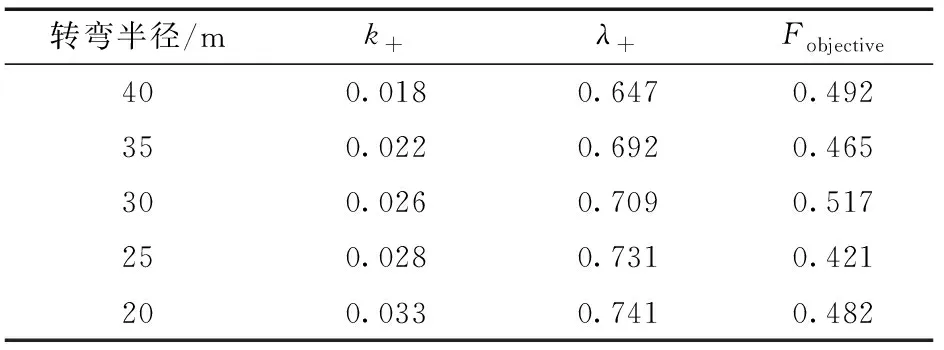
表3 改进的FVD模型加速回归系数Table 3 Accelerated regression coefficient of IFVD model

表4 改进后FVD模型减速回归系数Table 4 Decelerated regression coefficient of IFVD model
由表3、表4可知,随着转弯半径逐渐减小,模型中敏感度系数普遍增大,说明驾驶员的反应强度随转弯半径的减小而有所增大;前导车减速时所产生的敏感度系数要大于前导车加速时所产生的敏感度系数,这表明驾驶员在信号交叉口左转弯条件下进行跟驰行为时对于前导车减速时的反应更加敏感,其反应程度更加剧烈。
3.3 模型评价与讨论
利用统计学方法对改进后的FVD模型进行评价。采用的评价指标包括:平均绝对误差(mean absolute error, MAE)、平均相对误差(mean absolute relatively error, MARE)两个指标。MAE是所有单个观测值与算术平均值偏差的绝对值的平均,可以避免误差相互抵消的问题,准确反映实际预测误差的大小。MARE是对相对误差的平均值。仿真结果与真实值之间必然存在着差异。在进行误差分析时,一般需要进行多次的平行分析,然后取这几次结果的平均值作为最终结果。
首先,将依据数据处理原则选择参数输入到改进后的FVD模型中。然后利用MATLAB编程输出FVD模型及改进后的FVD模型的计算值,即模型的仿真值。以加速度的误差来评价改进后的跟驰模型实施效果,将模型仿真值与实际采集的数据(剔除无效数据后)进行对比,模型评价结果如表5所示。

表5 FVD模型评价结果Table 5 Evaluation results of FVD model
由表5可知,改进后的全速度差模型在比全速度差模型有更低的平均绝对误差和平均相对误差,这说明,改进后的模型更能准确地描述信号交叉口转弯过程中的跟驰行为。

从模型结构来看,虽然模型在改进前后结构依然类似,但是改进的FVD模型将交叉口转弯跟驰车辆的加速与加速过程区别建模,充分体现了对车辆转弯过程加减速度行为核心差异性的深刻理解和精细化处理。FVD模型的不同转弯半径MAE的平均值为2.6,改进后的FDV模型MAE的平均值约为2.3,这反映了改进后的FVD模型实际预测误差更小些,能更为准确地描述信号交叉口左转车辆跟驰过程的状态变化。此外,在不同转弯半径下改进后的FVD模型的MARE从改进前的0.28减少到改进后的0.16,也在此说明改进的FVD模型能够更为贴切地描述交叉口左转车辆的转弯跟驰行为。
4 结论
通过对信号交叉口左转车辆跟驰行为研究,得到如下结论。
(1)基于对不同转弯半径下城市信号交叉口左转跟驰车辆的速度统计,发现城市信号交叉口左转跟驰车辆的平均运行速度与转弯成正比。
(2)通过对不同转弯半径下跟驰车速度出现频数的统计分析可知:转弯半径越大,其最大频数所对应的速度就越大;相反,转弯半径越小,其最大频数所对应的速度越小。
(3)信号交叉口左转车辆在跟驰过程中,跟驰车对前导车减速行为的反应敏感度比加速行为的更高,即后车跟驰行为更容易受前导车减速行为的影响。
(4)在传统全速度差(FVD)模型的基础上,考虑了信号交叉口跟驰车对前导车加、减速状态反应强度的不同,构建了改进的全速度差模型来描述信号交叉口左转车辆的跟驰行为,通过模型参数标定和误差评价发现,改进后的FVD模型能更加贴切地描述实际场景中的跟驰行为。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
建材发展导向(2022年14期)2022-08-19
建材发展导向(2021年19期)2021-12-06
小天使·四年级语数英综合(2021年3期)2021-05-10
新教育时代·学生版(2020年10期)2020-07-31
福建基础教育研究(2020年1期)2020-05-28
天津建设科技(2020年2期)2020-05-13
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
中兴通讯技术(2017年1期)2017-03-11
安徽冶金科技职业学院学报(2015年3期)2015-12-02
